TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024120634
公報種別
公開特許公報(A)
公開日
2024-09-05
出願番号
2023027557
出願日
2023-02-24
発明の名称
訓練方法、装置及びプログラム
出願人
株式会社東芝
代理人
弁理士法人鈴榮特許綜合事務所
主分類
G06V
10/764 20220101AFI20240829BHJP(計算;計数)
要約
【課題】物体検出の精度を向上させること。
【解決手段】実施形態に係る訓練方法は、対象物の欠陥領域を含まない第1画像と、前記対象物の欠陥領域を含む第2画像とを機械学習モデルに入力することで、前記第1画像から第1特徴マップ及び第1アテンションマップを算出し、前記第2画像から第2特徴マップ及び第2アテンションマップを算出する。訓練方法は、前記第1アテンションマップに基づいて、第1損失を算出する。訓練方法は、前記第2特徴マップ及び前記第2アテンションマップを前記機械学習モデルに入力することで、統合マップと、前記対象物のクラス分類とを算出する。訓練方法は、前記クラス分類に基づいて、第2損失を算出する。訓練方法は、前記第1損失及び前記第2損失に基づいて、合計損失を算出する。訓練方法は、前記合計損失を最小化するように、前記機械学習モデルのパラメータを更新する。
【選択図】図1
特許請求の範囲
【請求項1】
対象物の欠陥領域を含まない第1画像と、前記対象物の欠陥領域を含む第2画像とを機械学習モデルに入力することで、前記第1画像から第1特徴マップ及び第1アテンションマップを算出し、前記第2画像から第2特徴マップ及び第2アテンションマップを算出する第1ステップと、
前記第1アテンションマップに基づいて、第1損失を算出する第2ステップと、
前記第2特徴マップ及び前記第2アテンションマップを前記機械学習モデルに入力することで、統合マップと、前記対象物のクラス分類とを算出する第3ステップと、
前記クラス分類に基づいて、第2損失を算出する第4ステップと、
前記第1損失及び前記第2損失に基づいて、合計損失を算出する第5ステップと、
前記合計損失を最小化するように、前記機械学習モデルのパラメータを更新する第6ステップと、
を具備する訓練方法。
続きを表示(約 1,100 文字)
【請求項2】
前記第2ステップにおいて、前記第1アテンションマップの平均値を、前記第1損失として算出する、
請求項1に記載の訓練方法。
【請求項3】
前記第3ステップにおいて、前記第2特徴マップの各要素の値と、前記第2アテンションマップの各要素の値とを乗算した積を、前記統合マップとして算出する、
請求項1に記載の訓練方法。
【請求項4】
前記第5ステップにおいて、前記第1損失に重みを乗算し、前記重みが乗算された前記第1損失と、前記第2損失とを加算することで、前記合計損失を算出する、
請求項1に記載の訓練方法。
【請求項5】
対象物の欠陥領域を含まない第1画像と、前記対象物の欠陥領域を含む第2画像とを機械学習モデルに入力することで、前記第1画像から第1特徴マップ及び第1アテンションマップを算出し、前記第2画像から第2特徴マップ及び第2アテンションマップを算出する第1マップ算出部と、
前記第1アテンションマップに基づいて、第1損失を算出する第1損失算出部と、
前記第2特徴マップ及び前記第2アテンションマップを前記機械学習モデルに入力することで、統合マップと、前記対象物のクラス分類とを算出する第2マップ算出部と、
前記クラス分類に基づいて、第2損失を算出する第2損失算出部と、
前記第1損失及び前記第2損失に基づいて、合計損失を算出する合計損失算出部と、
前記合計損失を最小化するように、前記機械学習モデルのパラメータを更新する更新部と、
を具備する訓練装置。
【請求項6】
コンピュータに、
対象物の欠陥領域を含まない第1画像と、前記対象物の欠陥領域を含む第2画像とを機械学習モデルに入力することで、前記第1画像から第1特徴マップ及び第1アテンションマップを算出し、前記第2画像から第2特徴マップ及び第2アテンションマップを算出する第1マップ算出機能と、
前記第1アテンションマップに基づいて、第1損失を算出する第1損失算出機能と、
前記第2特徴マップ及び前記第2アテンションマップを前記機械学習モデルに入力することで、統合マップと、前記対象物のクラス分類とを算出する第2マップ算出機能と、
前記クラス分類に基づいて、第2損失を算出する第2損失算出機能と、
前記第1損失及び前記第2損失に基づいて、合計損失を算出する合計損失算出機能と、
前記合計損失を最小化するように、前記機械学習モデルのパラメータを更新する更新機能と、
を実現させる訓練プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、訓練方法、装置及びプログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
物体検出の技術において、機械学習モデルは、画像から物体を検出する。通常、機械学習モデルの訓練のためには、画像中の物体の位置情報及びラベルを付した訓練データが必要である(教師あり学習)。しかしながら、物体の位置情報を含む訓練データの生成に掛かる作業量が大きいことから、物体のラベルのみを含む訓練データにより機械学習モデルを訓練する手法が提案されている(弱教師あり学習)。
【0003】
弱教師あり学習による物体検出の技術において、機械学習モデルは、例えば画像中の画素ごとの注目度を示すアテンションマップを生成し、アテンションマップに基づいて画像から物体の位置を検出する。特に、機械学習モデルが対象物の欠陥領域の位置を検出したい場合がある。この場合、アテンションマップにおいて、対象物の欠陥領域が強調され、かつ対象物の正常領域が抑制されるように、機械学習モデルを訓練する必要がある。
【先行技術文献】
【特許文献】
【0004】
特開2022-003495号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明が解決しようとする課題は、物体検出の精度を向上させることである。
【課題を解決するための手段】
【0006】
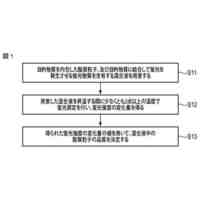
実施形態に係る訓練方法は、第1ステップと、第2ステップと、第3ステップと、第4ステップと、第5ステップと、第6ステップとを具備する。第1ステップにおいて、訓練方法は、対象物の欠陥領域を含まない第1画像と、前記対象物の欠陥領域を含む第2画像とを機械学習モデルに入力することで、前記第1画像から第1特徴マップ及び第1アテンションマップを算出し、前記第2画像から第2特徴マップ及び第2アテンションマップを算出する。第2ステップにおいて、訓練方法は、前記第1アテンションマップに基づいて、第1損失を算出する。第3ステップにおいて、訓練方法は、前記第2特徴マップ及び前記第2アテンションマップを前記機械学習モデルに入力することで、統合マップと、前記対象物のクラス分類とを算出する。第4ステップにおいて、訓練方法は、前記クラス分類に基づいて、第2損失を算出する。第5ステップにおいて、訓練方法は、前記第1損失及び前記第2損失に基づいて、合計損失を算出する。第6ステップにおいて、訓練方法は、前記合計損失を最小化するように、前記機械学習モデルのパラメータを更新する。
【図面の簡単な説明】
【0007】
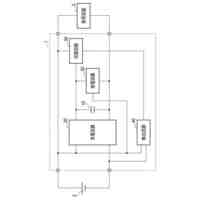
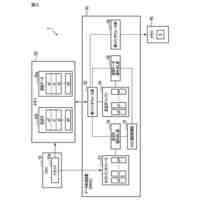
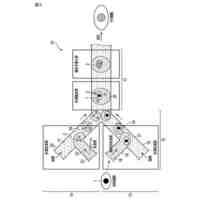
第1実施形態に係る訓練装置の機能構成例を示すブロック図。
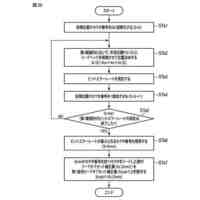
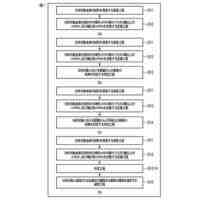
第1実施形態に係る訓練装置の動作例を示すフローチャート。
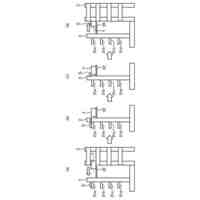
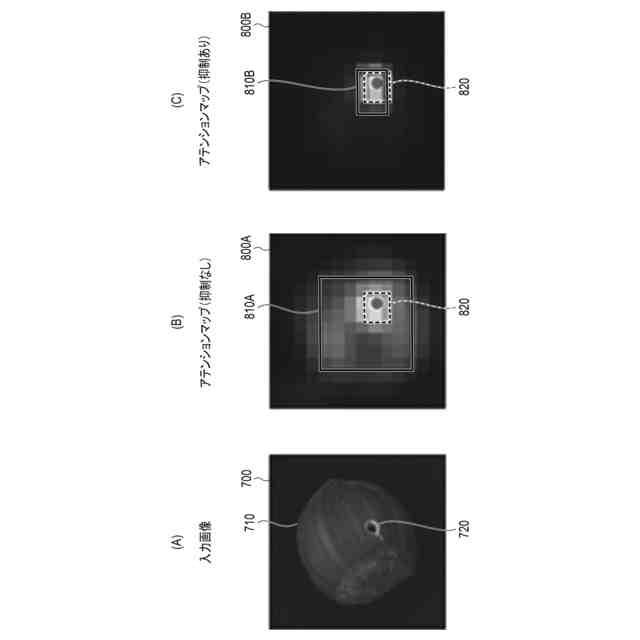
第1実施形態に係る機械学習モデルの処理結果の例を示す図。
第2実施形態に係る推論装置の機能構成例を示すブロック図。
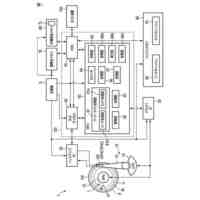
第1実施形態に係る訓練装置又は第2実施形態に係る推論装置のハードウェア構成例を示すブロック図。
【発明を実施するための形態】
【0008】
以下、図面を参照しながら実施形態に係る訓練方法、装置及びプログラムについて説明する。以下の実施形態では、同一の参照符号を付した部分は同様の動作を行うものとして、重複する説明を適宜、省略する。
【0009】
(第1実施形態)
図1は、第1実施形態に係る訓練装置1の機能構成例を示すブロック図である。訓練装置1は、訓練データTを用いて機械学習モデル500を訓練する装置である。訓練装置1は、取得部11、特徴マップ算出部12、アテンションマップ算出部13、統合マップ算出部14、クラス分類算出部15、正常損失算出部16、分類損失算出部17、合計損失算出部18及び更新部19を備える。以下、機械学習モデル500は、ニューラルネットワーク(NW)により構成された物体検出モデルであり、対象物(例:工業製品、薬品、食料品)の欠陥領域(例:損傷、亀裂、穴)の位置を検出するとともに、対象物のクラス分類を算出する。
【0010】
取得部11は、各種のデータ又は情報を取得する。例えば、取得部11は、訓練データTとして、正常画像100及び異常画像200を取得する。正常画像100は、対象物の欠陥領域を含まない画像(第1画像)である。異常画像200は、対象物の欠陥領域を含む画像(第2画像)である。換言すれば、正常画像100は、対象物の正常領域のみを含む画像であり、異常画像200は、対象物の正常領域及び欠陥領域を含む画像である。正常画像100及び異常画像200には、対象物のラベル(正解ベクトル)が付されていてもよい。取得部11は、取得した訓練データTを、特徴マップ算出部12に送信する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
遮断装置
1日前
株式会社東芝
制御装置
1か月前
株式会社東芝
回転電機
8日前
株式会社東芝
判定装置
3日前
株式会社東芝
電子機器
2日前
株式会社東芝
搬送装置
2日前
株式会社東芝
立て看板
28日前
株式会社東芝
半導体装置
7日前
株式会社東芝
半導体装置
8日前
株式会社東芝
半導体装置
28日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
アイソレータ
15日前
株式会社東芝
スイッチギヤ
23日前
株式会社東芝
ディスク装置
27日前
株式会社東芝
区分システム
1か月前
株式会社東芝
紙葉類処理装置
14日前
株式会社東芝
物品区分システム
16日前
株式会社東芝
磁気ディスク装置
2日前
株式会社東芝
バックアップ回路
14日前
株式会社東芝
磁気ディスク装置
1か月前
株式会社東芝
接合方法及び接合装置
8日前
株式会社東芝
固定子および回転電機
17日前
株式会社東芝
タービン軸シール装置
1日前
株式会社東芝
組電池および通電部材
1か月前
株式会社東芝
データ転送装置及び方法
10日前
株式会社東芝
脂質粒子の品質評価方法
2日前
株式会社東芝
コンテナバッグ用かご装置
16日前
株式会社東芝
鉄道車両用作業支援システム
27日前
株式会社東芝
仕分けシステム及び仕分け方法
1か月前
株式会社東芝
分析方法、マーカー及びキット
1か月前
株式会社東芝
標的細胞作製方法及びシステム
2日前
株式会社東芝
磁気ヘッド、及び、磁気記録装置
23日前
株式会社東芝
ICモジュール、及びICカード
1日前
株式会社東芝
窒化物構造体、及び、半導体装置
23日前
株式会社東芝
スラスト軸受装置および回転電機
1日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ