TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024114193
公報種別
公開特許公報(A)
公開日
2024-08-23
出願番号
2023019790
出願日
2023-02-13
発明の名称
隊列走行システム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
,
株式会社J-QuAD DYNAMICS
代理人
弁理士法人酒井国際特許事務所
主分類
G08G
1/00 20060101AFI20240816BHJP(信号)
要約
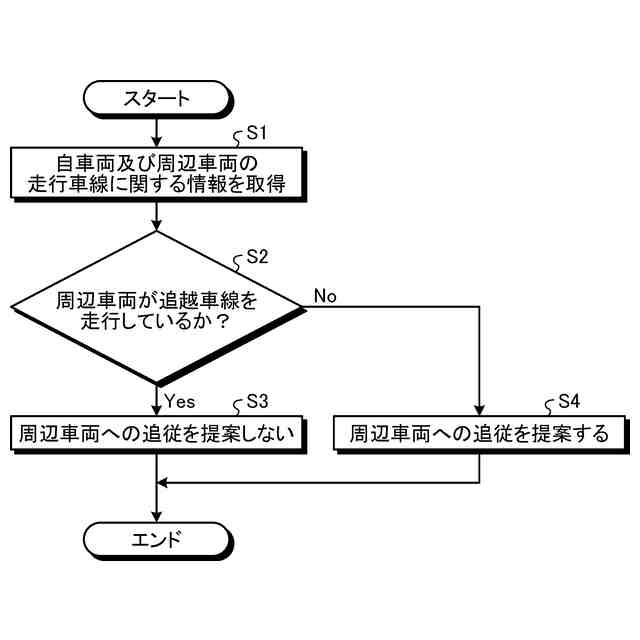
【課題】隊列走行で自車両が追越車線を走行し続けることを抑制することができる隊列走行システムを提供すること。
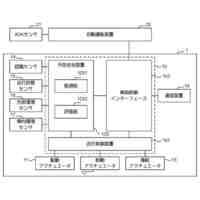
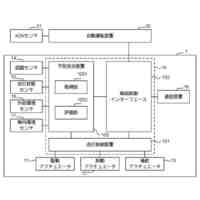
【解決手段】自車両の周辺を走行する周辺車両への自車両の追従を提案する制御を実施可能な、自車両に設けられた制御装置を有する隊列走行システムであって、制御装置は、追越車線を走行している周辺車両への追従を提案しない。
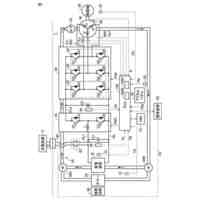
【選択図】図3
特許請求の範囲
【請求項1】
自車両の周辺を走行する周辺車両への前記自車両の追従を提案する制御を実施可能な、前記自車両に設けられた制御装置を有する隊列走行システムであって、
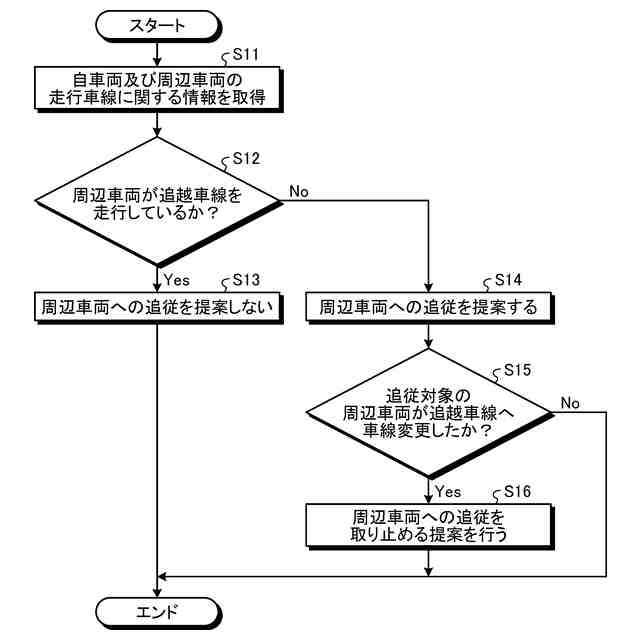
前記制御装置は、追越車線を走行している前記周辺車両への追従を提案しないことを特徴とする隊列走行システム。
続きを表示(約 1,000 文字)
【請求項2】
前記制御装置は、前記自車両及び前記周辺車両のそれぞれの位置情報と、地図情報とに基づいて、前記自車両及び前記周辺車両がそれぞれ走行する車線を認識することを特徴とする請求項1に記載の隊列走行システム。
【請求項3】
前記制御装置は、前記位置情報と地図情報とに基づいて、前記自車両が走行している道路の総車線数を認識し、
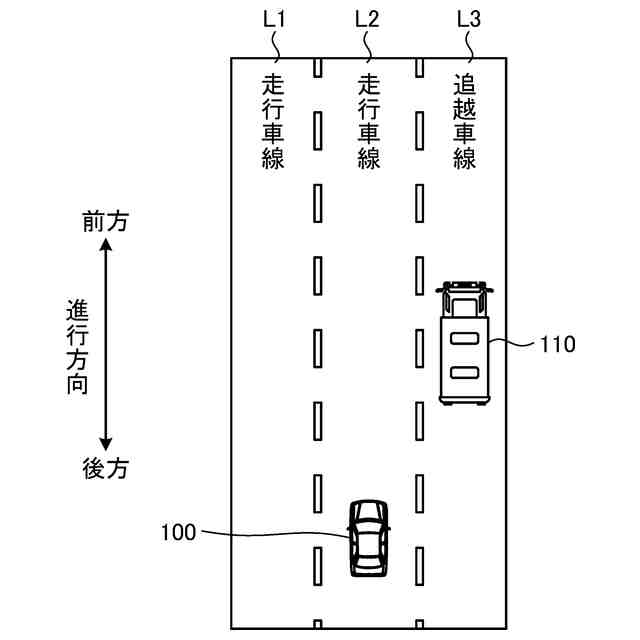
前記総車線数が片側2車線であって、前記片側2車線のうちの進行方向で左側の車線を前記自車両が走行している場合には、前記自車両に対して進行方向で右側の車線を走行している前記周辺車両への追従を提案しないことを特徴とする請求項2に記載の隊列走行システム。
【請求項4】
前記自車両は、前記自車両の周辺を撮影する撮像装置を備えており、
前記制御装置は、前記撮像装置によって撮影された画像の画像認識によって、前記自車両及び前記周辺車両がそれぞれ走行している車線を認識することを特徴とする請求項1に記載の隊列走行システム。
【請求項5】
自車両の周辺を走行する周辺車両への前記自車両の追従を提案する制御を実施可能な、前記自車両に設けられた制御装置を有する隊列走行システムであって、
前記制御装置は、追越車線ではない車線を走行している前記周辺車両への追従を提案した後、該周辺車両が追越車線へ車線変更した場合、該周辺車両への追従を取り止める提案を行う制御を実施することを特徴とする隊列走行システム。
【請求項6】
前記制御装置は、追越車線ではない車線を走行している前記周辺車両への追従を提案した後、該周辺車両が追越車線へ車線変更した場合であって、前記自車両が該周辺車両を追従して追越車線を所定時間または所定距離走行し続けている場合に、該周辺車両への追従を取り止める提案を行う制御を実施することを特徴とする請求項5に記載の隊列走行システム。
【請求項7】
前記制御装置は、追越車線ではない車線を走行している前記周辺車両への追従を提案した後、該周辺車両が追越車線へ車線変更した場合であって、前記自車両が該周辺車両を追従して追越車線を走行した結果、前記自車両による追い越しが完了したと判断した後に、該周辺車両への追従を取り止める提案を行う制御を実施することを特徴とする請求項5に記載の隊列走行システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、隊列走行システムに関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
特許文献1には、車両が隊列走行する道路の状況に基づいて、その実施可否を適切に判断して隊列走行を管理することができるとされた車両管理装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2020/162343号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、隊列走行を行うために、追越車線を走行する車両への追従を提案してしまうと、隊列走行で自車両が追越車線を走行し続けるおそれがある。
【0005】
本発明は、上記課題に鑑みてなされたものであって、その目的は、隊列走行で自車両が追越車線を走行し続けることを抑制することができる隊列走行システムを提供することである。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明に係る隊列走行システムは、自車両の周辺を走行する周辺車両への前記自車両の追従を提案する制御を実施可能な、前記自車両に設けられた制御装置を有する隊列走行システムであって、前記制御装置は、追越車線を走行している前記周辺車両への追従を提案しないことを特徴とするものである。
【0007】
これにより、隊列走行で自車両が追越車線を走行し続けることを抑制することができる。
【0008】
また、上記において、前記制御装置は、前記自車両及び前記周辺車両のそれぞれの位置情報と、地図情報とに基づいて、前記自車両及び前記周辺車両がそれぞれ走行する車線を認識するようにしてもよい。
【0009】
これにより、制御装置は、前記位置情報及び前記地図情報に基づいて、自車両及び周辺車両がそれぞれ走行している車線を認識し、自車両及び周辺車両がそれぞれ追越車線を走行しているか否かを認識することができる。
【0010】
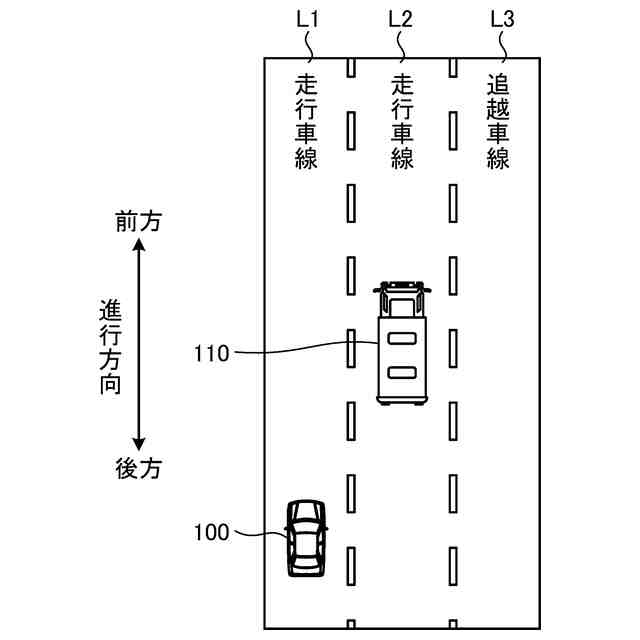
また、上記において、前記制御装置は、前記位置情報と地図情報とに基づいて、前記自車両が走行している道路の総車線数を認識し、前記総車線数が片側2車線であって、前記片側2車線のうちの進行方向で左側の車線を前記自車両が走行している場合には、前記自車両に対して進行方向で右側の車線を走行している前記周辺車両への追従を提案しないようにしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
タンク
1日前
トヨタ自動車株式会社
回転機
4日前
トヨタ自動車株式会社
接続構造
7日前
トヨタ自動車株式会社
充電装置
7日前
トヨタ自動車株式会社
接続装置
1日前
トヨタ自動車株式会社
電動車両
4日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
車体構造
8日前
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
電動車両
8日前
トヨタ自動車株式会社
伸縮装置
今日
トヨタ自動車株式会社
電動車両
今日
トヨタ自動車株式会社
電動車両
1日前
トヨタ自動車株式会社
燃料電池
1日前
トヨタ自動車株式会社
蓄電セル
7日前
トヨタ自動車株式会社
二次電池
7日前
トヨタ自動車株式会社
電動車両
4日前
トヨタ自動車株式会社
伸縮装置
7日前
トヨタ自動車株式会社
充電リレー
1日前
トヨタ自動車株式会社
電気モータ
1日前
トヨタ自動車株式会社
自律移動体
4日前
トヨタ自動車株式会社
電池パック
1日前
トヨタ自動車株式会社
自動搬送車
4日前
トヨタ自動車株式会社
サーバ装置
1日前
トヨタ自動車株式会社
サーバ装置
1日前
トヨタ自動車株式会社
電気ユニット
1日前
トヨタ自動車株式会社
車両制御装置
1日前
トヨタ自動車株式会社
車両下部構造
1日前
トヨタ自動車株式会社
通信システム
4日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ