TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024086562
公報種別
公開特許公報(A)
公開日
2024-06-27
出願番号
2023149387
出願日
2023-09-14
発明の名称
レーダ目標追尾装置及びレーダ目標追尾プログラム
出願人
日本無線株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G01S
13/72 20060101AFI20240620BHJP(測定;試験)
要約
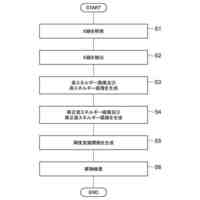
【課題】本開示は、レーダを用いて船舶又は航空機等の目標を追尾するにあたり、波又は雲等によるクラッタの密度が高いときでも、クラッタを着目目標に誤って紐付ける可能性を低くするとともに、着目目標の予測ゲートを狭めずに、着目目標の追尾処理を途絶えさせる可能性を低くすることを目的とする。
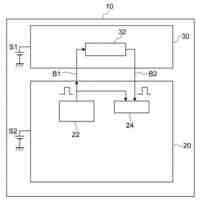
【解決手段】本開示は、各回のレーダスキャンにおいて、着目目標の予測ゲートの内部にある各目標について、前回のレーダスキャンにおける着目目標の観測ドップラ速度及び/又は断面積から、各回のレーダスキャンにおける各目標の観測ドップラ速度及び/又は断面積への、スキャン間変化率を算出するスキャン間相関部14と、各回のレーダスキャンにおいて、着目目標の予測ゲートの内部にある各目標のうちの、スキャン間変化率が最も小さい目標を、着目目標に紐付ける目標追尾部15と、を備えるレーダ目標追尾装置2である。
【選択図】図2
特許請求の範囲
【請求項1】
各回のレーダスキャンにおいて、検出点をクラスタリングし、各目標の位置を検出し、各目標の観測ドップラ速度及び断面積の少なくともいずれかを検出する目標検出部と、
各回のレーダスキャンにおいて、次回のレーダスキャンに備えて、各目標の位置を予測し、各目標の予測位置を中心として、各目標の予測ゲートを設定する目標位置予測部と、
各回のレーダスキャンにおいて、着目目標の予測ゲートの内部にある各目標について、前回のレーダスキャンにおける前記着目目標の観測ドップラ速度及び断面積の少なくともいずれかから、各回のレーダスキャンにおける各目標の観測ドップラ速度及び断面積の少なくともいずれかへの、スキャン間変化率を算出するスキャン間相関部と、
各回のレーダスキャンにおいて、前記着目目標の予測ゲートの内部にある各目標のうちの、前記スキャン間変化率が最も小さい目標を、前記着目目標に紐付ける目標追尾部と、
を備えることを特徴とするレーダ目標追尾装置。
続きを表示(約 1,900 文字)
【請求項2】
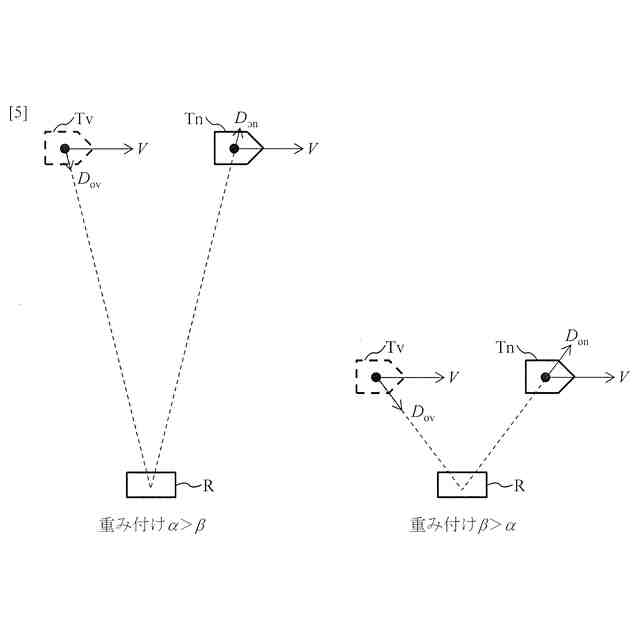
前記スキャン間相関部は、各回のレーダスキャンにおいて、前記着目目標の予測ゲートの内部にある各目標について、前回のレーダスキャンにおける前記着目目標の観測ドップラ速度から、各回のレーダスキャンにおける各目標の観測ドップラ速度への観測ドップラ速度変化率と、前回のレーダスキャンにおける前記着目目標の断面積から、各回のレーダスキャンにおける各目標の断面積への断面積変化率と、を前記着目目標のレーダからの距離又は前記着目目標の運動状態に応じた重み付けで加算し、前記スキャン間変化率を算出する
ことを特徴とする、請求項1に記載のレーダ目標追尾装置。
【請求項3】
前記スキャン間相関部は、前記着目目標のレーダからの距離が遠いほど、前記観測ドップラ速度変化率に対する重み付けを前記断面積変化率に対する重み付けと比べて大きくする一方で、前記着目目標のレーダからの距離が近いほど、前記断面積変化率に対する重み付けを前記観測ドップラ速度変化率に対する重み付けと比べて大きくする
ことを特徴とする、請求項2に記載のレーダ目標追尾装置。
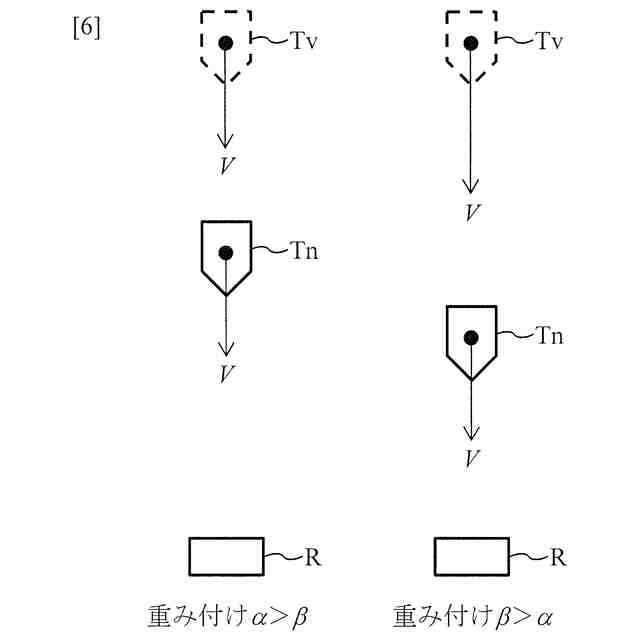
【請求項4】
前記スキャン間相関部は、前記着目目標の運動状態が一定速度状態であるほど、前記観測ドップラ速度変化率に対する重み付けを前記断面積変化率に対する重み付けと比べて大きくする一方で、前記着目目標の運動状態が急加減速状態であるほど、前記断面積変化率に対する重み付けを前記観測ドップラ速度変化率に対する重み付けと比べて大きくする
ことを特徴とする、請求項2に記載のレーダ目標追尾装置。
【請求項5】
各回のレーダスキャンにおいて、検出点をクラスタリングし、各目標の位置を検出し、各目標の観測ドップラ速度及び断面積の少なくともいずれかを検出し、必要に応じて各目標の受信電力を検出する目標検出部と、
各回のレーダスキャンにおいて、次回のレーダスキャンに備えて、各目標の位置を予測し、必要に応じて各目標のドップラ速度を予測し、各目標の予測位置を中心として、各目標の予測ゲートを設定する目標位置予測部と、
各回のレーダスキャンにおいて、着目目標の予測ゲートの内部にある各目標について、以下の(1)及び(2)のスキャン間変化率を算出するスキャン間相関部と、
(1)前回のレーダスキャンにおける前記着目目標の観測ドップラ速度及び断面積の少なくともいずれかから、各回のレーダスキャンにおける各目標の観測ドップラ速度及び断面積の少なくともいずれかへの、前記スキャン間変化率、及び、
(2)前回のレーダスキャンにおける前記着目目標の予測ドップラ速度及び受信電力の少なくともいずれかから、各回のレーダスキャンにおける各目標の観測ドップラ速度及び受信電力の少なくともいずれかへの、前記スキャン間変化率、
各回のレーダスキャンにおいて、前記着目目標の予測ゲートの内部にある各目標のうちの、前記スキャン間変化率が最も小さい目標を、前記着目目標に紐付ける目標追尾部と、
を備えることを特徴とするレーダ目標追尾装置。
【請求項6】
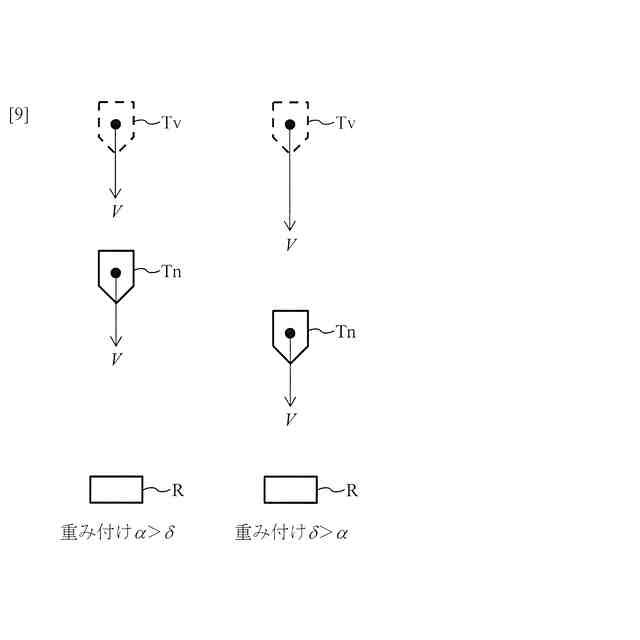
前記スキャン間相関部は、各回のレーダスキャンにおいて、前記着目目標の予測ゲートの内部にある各目標について、以下の(1)及び(2)の変化率を、前記着目目標のレーダからの距離、前記着目目標の運動状態、前記着目目標の運動状態の予測精度、前記着目目標の周囲の天候、前記着目目標の断面積の解像度又は前記着目目標の受信電力の安定度に応じた重み付けで加算し、前記スキャン間変化率を算出する:
(1)前回のレーダスキャンにおける前記着目目標の観測ドップラ速度から、各回のレーダスキャンにおける各目標の観測ドップラ速度への観測ドップラ速度変化率と、前回のレーダスキャンにおける前記着目目標の断面積から、各回のレーダスキャンにおける各目標の断面積への断面積変化率と、の少なくともいずれか、及び、
(2)前回のレーダスキャンにおける前記着目目標の予測ドップラ速度から、各回のレーダスキャンにおける各目標の観測ドップラ速度への予測ドップラ速度変化率と、前回のレーダスキャンにおける前記着目目標の受信電力から、各回のレーダスキャンにおける各目標の受信電力への受信電力変化率と、の少なくともいずれか、
ことを特徴とする、請求項5に記載のレーダ目標追尾装置。
【請求項7】
請求項1から6のいずれかに記載のレーダ目標追尾装置が備える各処理部が実行する各処理ステップを、コンピュータに実行させるためのレーダ目標追尾プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、レーダを用いて目標を追尾する技術に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
レーダを用いて目標を追尾する技術が特許文献1等に開示されている。特許文献1では、各回のレーダスキャンにおいて、検出点をクラスタリングし、各目標の位置、観測ドップラ速度及びレーダの送受信装置の受信強度を検出する。そして、各回のレーダスキャンにおいて、次回のレーダスキャンに備えて、各目標の位置及びドップラ速度を予測し、各目標の予測位置を中心として、各目標の予測ゲートを設定する。さらに、各回のレーダスキャンにおいて、着目目標の予測ゲートの内部にある各目標のうちの、着目目標の予測位置に最も近い目標を、着目目標に紐付ける。
【0003】
ただし、各回のレーダスキャンにおいて、着目目標の予測位置からの距離が等しいとともに、レーダの送受信装置の受信強度が等しい各目標が、複数存在することがある。そこで、各回のレーダスキャンにおいて、これらの複数存在する各目標のうちの、着目目標の予測ドップラ速度に最も近い観測ドップラ速度を有する目標を、着目目標に紐付ける。
【先行技術文献】
【特許文献】
【0004】
特開2002-341025号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
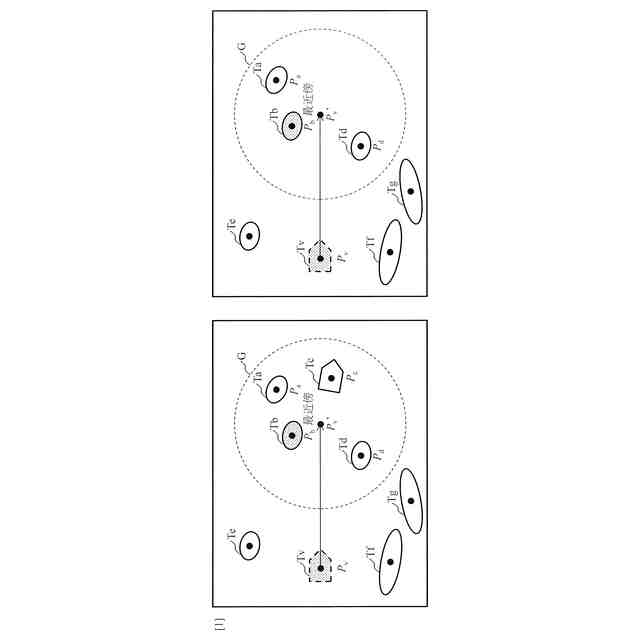
従来技術のレーダ目標追尾処理の具体例を図1に示す。図1では、前回のレーダスキャンにおいて、着目目標Tvの検出位置はP
v
であり、最新のレーダスキャンにおいて、着目目標Tvの予測位置はP
v
’であり、着目目標Tvの予測ゲートGが設定される。そして、最新のレーダスキャンにおいて、着目目標Tvの予測ゲートGの内部では、目標Ta、Tb、Tc、Tdの検出位置は、P
a
、P
b
、P
c
、P
d
であり(右欄では目標Tcが不存在)、着目目標Tvの予測ゲートGの外部では、目標Te、Tf、Tgが存在する。
【0006】
図1では、着目目標Tv及び目標Tcは、船舶又は航空機等であり(右欄では目標Tcが何らかの理由(自物標の潜水による要因、自物標と別物標との位置関係・運動状態による偶発的要因又はレーダの信号処理における何らかの要因等)によりレーダで観測できない)、目標Ta、Tb、Td、Te、Tf、Tgは、波又は雲等によるクラッタである。すると、クラッタの密度が高いときには、クラッタである目標Tbが、着目目標Tvの予測位置P
v
’に最も近く、着目目標Tvに誤って紐付けられる可能性が高い。そして、クラッタである目標Tbが、次回以降のレーダスキャンにおいて誤追尾される可能性が高い。一方で、着目目標Tvの予測ゲートGが狭いときには、クラッタである目標Tbが、着目目標Tvに誤って紐付けられる可能性が低い。しかし、着目目標Tvの予測位置P
v
’が、高精度に予測されなければ、目標Tcの検出位置P
c
が、着目目標Tvの予測ゲートGの内部に存在せず、着目目標Tvの追尾処理が、途絶える可能性が高い。
【0007】
そこで、前記課題を解決するために、本開示は、レーダを用いて船舶又は航空機等の目標を追尾するにあたり、波又は雲等によるクラッタの密度が高いときでも、クラッタを着目目標に誤って紐付ける可能性を低くするとともに、着目目標の予測ゲートを狭めずに、着目目標の追尾処理を途絶えさせる可能性を低くすることを目的とする。
【課題を解決するための手段】
【0008】
前記課題を解決するために、レーダスキャン毎(例えば、数秒程度)に、各目標の観測ドップラ速度及び/又は断面積が、急激に変化しないことに注目する。つまり、着目目標の予測ゲートの内部にある各目標について、前回のレーダスキャンにおける着目目標の観測ドップラ速度及び/又は断面積から、各回のレーダスキャンにおける各目標の観測ドップラ速度及び/又は断面積への、スキャン間変化率を算出する。そして、着目目標の予測ゲートの内部にある各目標のうちの、スキャン間変化率が最も小さい目標を、着目目標に紐付ける。ここで、着目目標の予測ゲートの内部にある各目標であれば、着目目標の予測位置からの距離によらず対等に扱い、観測ドップラ速度及び/又は断面積のスキャン間変化率に注目する。
【0009】
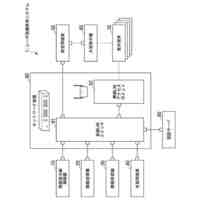
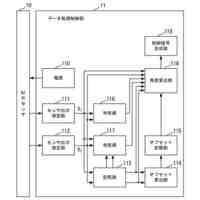
具体的には、本開示は、各回のレーダスキャンにおいて、検出点をクラスタリングし、各目標の位置を検出し、各目標の観測ドップラ速度及び断面積の少なくともいずれかを検出する目標検出部と、各回のレーダスキャンにおいて、次回のレーダスキャンに備えて、各目標の位置を予測し、各目標の予測位置を中心として、各目標の予測ゲートを設定する目標位置予測部と、各回のレーダスキャンにおいて、着目目標の予測ゲートの内部にある各目標について、前回のレーダスキャンにおける前記着目目標の観測ドップラ速度及び断面積の少なくともいずれかから、各回のレーダスキャンにおける各目標の観測ドップラ速度及び断面積の少なくともいずれかへの、スキャン間変化率を算出するスキャン間相関部と、各回のレーダスキャンにおいて、前記着目目標の予測ゲートの内部にある各目標のうちの、前記スキャン間変化率が最も小さい目標を、前記着目目標に紐付ける目標追尾部と、を備えることを特徴とするレーダ目標追尾装置である。
【0010】
この構成によれば、船舶又は航空機等の着目目標の予測ゲートの内部にある各目標について、観測ドップラ速度及び/又は断面積のスキャン間変化率に注目するため、波又は雲等によるクラッタの密度が高いときでも、クラッタを着目目標に誤って紐付ける可能性を低くすることができる。そして、船舶又は航空機等の着目目標の予測ゲートの内部にある各目標であれば、着目目標の予測位置からの距離によらず対等に扱うため、着目目標の予測ゲートを狭めずに、着目目標の追尾処理を途絶えさせる可能性を低くすることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本無線株式会社
アレーアンテナ
3日前
長野日本無線株式会社
チョークコイル
13日前
日本無線株式会社
設備教育システム、設備教育方法
1か月前
日本無線株式会社
送信源位置速度標定装置及び送信源位置速度標定プログラム
13日前
日本無線株式会社
送信源位置速度標定装置及び送信源位置速度標定プログラム
13日前
日本無線株式会社
無線受信装置
13日前
住友重機械工業株式会社
回転装置
今日
株式会社イシダ
重量検査装置
今日
株式会社プロテリアル
外観検査装置
今日
関西電力送配電株式会社
固定台
今日
英弘精機株式会社
測定装置
今日
株式会社イシダ
X線検査装置
今日
大阪瓦斯株式会社
付属機器取付部材
今日
株式会社イシダ
組合せ計量装置
今日
アズビル株式会社
角度検出装置およびポジショナ
今日
株式会社アイシン
静電容量センサシステム
今日
株式会社イシダ
X線検査装置
今日
アズビル株式会社
角度検出装置およびポジショナ
今日
株式会社村田製作所
電流センサ
今日
株式会社イシダ
物品把持システム
今日
原子燃料工業株式会社
配管詰まり診断方法
今日
株式会社リコー
車体検査装置及び車体検査方法
今日
矢崎総業株式会社
部品組付構造
今日
PDRファーマ株式会社
腹部圧迫体
今日
岩崎電気株式会社
照度測定システム
今日
日本精機株式会社
センサユニット及び車載表示装置
今日
矢崎総業株式会社
パッキン貼付構造
今日
ラピステクノロジー株式会社
集積回路
今日
太平洋セメント株式会社
コンクリートの劣化の早期検知方法
今日
株式会社日立国際電気
画像解析システム
今日
株式会社イシダ
X線検査装置及びX線検査方法
今日
株式会社東芝
検査システム及び検査方法
今日
ニデックコンポーネンツ株式会社
起歪体
今日
株式会社明電舎
車両自動運転装置用アクチュエータ
今日
株式会社明電舎
車両自動運転装置用アクチュエータ
今日
日本特殊陶業株式会社
センサ素子、ガスセンサ及びセンサ素子の製造方法
今日
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ