TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024069851
公報種別
公開特許公報(A)
公開日
2024-05-22
出願番号
2022180100
出願日
2022-11-10
発明の名称
移動体の制御システム、制御プログラム、制御方法
出願人
国立大学法人 東京大学
代理人
個人
,
個人
,
個人
,
個人
主分類
B60W
30/165 20200101AFI20240515BHJP(車両一般)
要約
【課題】より適切に移動体を制御することが可能な制御システムを提供する。
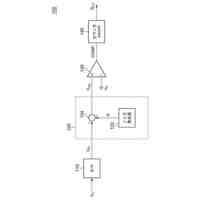
【解決手段】制御システム40は、自動運転制御部640と、制御信号調整部641と、を備える。自動運転制御部640は、ステアリング装置63を駆動させるための操舵角信号を生成する。制御信号調整部641は、ステアリング装置63の駆動に基づく車両60の横位置と、ステアリング装置53の駆動に基づく車両50の横位置との誤差に基づいて適応パラメータを設定するとともに、適応パラメータに基づいて操舵角信号を調整することにより追従操舵角信号を設定する。ステアリング装置53は、追従操舵角信号に基づいて制御される。
【選択図】図5
特許請求の範囲
【請求項1】
所定の移動体を制御するための制御信号を生成する制御信号生成部と、
前記所定の移動体の挙動と、制御対象の移動体の挙動との誤差に基づいて適応パラメータを設定するとともに、前記適応パラメータに基づいて前記制御信号を調整することにより調整後制御信号を設定する制御信号調整部と、を備え、
前記制御対象の移動体は、前記調整後制御信号に基づいて制御される
移動体の制御システム。
続きを表示(約 1,300 文字)
【請求項2】
前記制御信号調整部は、前記調整後制御信号に対して所定の演算を行うことにより得られる演算値と前記誤差とに基づいて前記適応パラメータを設定する
請求項1に記載の移動体の制御システム。
【請求項3】
前記制御信号調整部は、前記制御対象の移動体の挙動を示す物理量に対して所定の演算を行うことにより得られる演算値と前記誤差とに基づいて前記適応パラメータを設定する
請求項1に記載の移動体の制御システム。
【請求項4】
前記制御信号調整部は、前記制御対象の移動体の挙動を示す物理量と前記誤差とに基づいて前記適応パラメータを設定する
請求項1に記載の移動体の制御システム。
【請求項5】
前記制御信号調整部は、前記制御信号と前記誤差とに基づいて前記適応パラメータを設定する
請求項1に記載の移動体の制御システム。
【請求項6】
前記制御信号調整部は、前記適応パラメータの時間微分値に基づいて前記調整後制御信号を設定する
請求項1に記載の移動体の制御システム。
【請求項7】
前記所定の移動体は、第1車両であり、
前記制御対象の移動体は、前記第1車両とは別の第2車両である
請求項1に記載の移動体の制御システム。
【請求項8】
前記制御信号は、前記第1車両に設けられる第1ステアリング装置を制御するための制御信号であり、
前記調整後制御信号は、前記第2車両に設けられる第2ステアリング装置を制御するための制御信号であり、
前記制御信号調整部は、
前記制御対象の移動体の挙動として、前記第2車両が所定の車線内を走行している際の前記車線内の前記第2車両の横位置を用いるとともに、
前記所定の移動体の挙動として、前記第1車両が前記車線内を走行している際の前記車線内の前記第1車両の横位置を用いる
請求項7に記載の移動体の制御システム。
【請求項9】
前記制御信号調整部は、前記第1車両に設けられ、
前記第1車両に設けられ、前記調整後制御信号を前記第2車両に送信する送信部を更に備え、
前記第2ステアリング装置は、前記送信部により前記第2車両に送信される前記調整後制御信号に基づいて制御される
請求項8に記載の移動体の制御システム。
【請求項10】
前記制御信号生成部を第1制御信号生成部とし、前記制御信号を第1制御信号とするとき、
前記第2車両に設けられ、前記第2ステアリング装置を駆動させるための第2制御信号を生成する第2制御信号生成部と、
前記第2車両に設けられ、前記第2車両の異常を検出する異常検出部と、
前記異常検出部により前記第2車両の異常が検出された際に、前記第2ステアリング装置に入力する信号を前記第2制御信号から前記調整後制御信号に切り換える制御切替部と、を備える
請求項9に記載の移動体の制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体の制御システム、制御プログラム、及び制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、下記の特許文献1に記載の車両の制御装置がある。この制御装置は、ステアリングホイールの操作量をセンサにより検出するとともに、検出された操作量に基づいてアクチュエータを駆動させることにより車輪の舵角を変化させている。
【先行技術文献】
【特許文献】
【0003】
特開2009-241854号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されるような制御装置では、通常、センサにより検出されるステアリングホイールの操作量と所定の制御パラメータとに基づいてアクチュエータの制御量が演算されるとともに、演算された制御量に基づいてアクチュエータが制御される。制御パラメータは、望んだ操舵性が得られるように例えば車種ごとに調整される。しかしながら、適切な制御パラメータを取得するためには長時間のテスト走行等を行う必要があるため、手間がかかる。また、センサに異常が生じたような場合にはアクチュエータの制御量が適切に設定されなくなるため、この場合にもその状況に応じた制御パラメータが必要になるが、そのような制御パラメータを取得することは困難である。
【0005】
なお、このような課題は、車両に限らず、任意の移動体にも同様に発生し得る。
本発明は、こうした実情に鑑みてなされたものであり、その目的は、より適切に移動体を制御することが可能な制御システム、制御プログラム、及び制御方法を提供することにある。
【課題を解決するための手段】
【0006】
本実施形態の一態様による移動体の制御システムは、制御信号生成部と、制御信号調整部と、を備える。制御信号生成部は、所定の移動体を制御するための制御信号を生成する。制御信号調整部は、所定の移動体の挙動と、制御対象の移動体の挙動との誤差に基づいて適応パラメータを設定するとともに、適応パラメータに基づいて制御信号を調整することにより調整後制御信号を設定する。制御対象の移動体は、調整後制御信号に基づいて制御される。
【0007】
この構成によれば、調整後制御信号に基づいて制御対象の移動体が制御されることにより、制御対象の移動体の挙動と所定の移動体の挙動との誤差を小さくすることができる。したがって、制御対象の移動体の挙動を所定の移動体の挙動に追従させることができるため、より適切に制御対象の移動体を制御することが可能である。
【0008】
上記の移動体の制御システムにおいて、制御信号調整部は、調整後制御信号に対して所定の演算を行うことにより得られる演算値と誤差とに基づいて適応パラメータを設定することができる。
上記の移動体の制御システムにおいて、制御信号調整部は、制御対象の移動体の挙動を示す物理量に対して所定の演算を行うことにより得られる演算値と誤差とに基づいて適応パラメータを設定することができる。
【0009】
上記の移動体の制御システムにおいて、制御信号調整部は、制御対象の移動体の挙動を示す物理量と誤差とに基づいて適応パラメータを設定することができる。
上記の移動体の制御システムにおいて、制御信号調整部は、制御信号と誤差とに基づいて適応パラメータを設定することができる。
【0010】
上記の移動体の制御システムにおいて、制御信号調整部は、適応パラメータの時間微分値に基づいて調整後制御信号を設定することができる。
上記の移動体の制御システムにおいて、所定の移動体を、第1車両とし、制御対象の移動体を、第1車両とは別の第2車両とすることができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
国立大学法人 東京大学
計測装置
1か月前
国立大学法人 東京大学
加工方法
19日前
国立大学法人 東京大学
学習システム
19日前
国立大学法人 東京大学
計算機チップ
2か月前
国立大学法人 東京大学
外接歯車ポンプ
3か月前
国立大学法人 東京大学
ゲノム編集技術
3か月前
国立大学法人 東京大学
骨材及びその製造方法
28日前
国立大学法人 東京大学
計測システム及び計測方法
3か月前
国立大学法人 東京大学
通信装置、及びプログラム
3か月前
国立大学法人 東京大学
異種金属部材の重ね溶接方法
3か月前
国立大学法人 東京大学
金属有機構造体薄膜の作製方法
1か月前
国立大学法人 東京大学
ナノ免疫療法用高分子ミセル型医薬
3か月前
国立大学法人 東京大学
積層造形システム及び積層造形方法
1か月前
国立大学法人東京工業大学
リシール細胞セット及びその製造方法
1か月前
国立大学法人 東京大学
検出システム、検出方法及びプログラム
1か月前
日本特殊陶業株式会社
超音波発生装置
1か月前
日本特殊陶業株式会社
超音波発生装置
1か月前
国立大学法人 東京大学
プログラムおよび医療情報管理システム
3か月前
日本特殊陶業株式会社
超音波発生装置
1か月前
日本特殊陶業株式会社
超音波発生装置
1か月前
日本特殊陶業株式会社
超音波発生装置
1か月前
日本特殊陶業株式会社
超音波発生装置
1か月前
日本特殊陶業株式会社
超音波発生装置
1か月前
日本特殊陶業株式会社
超音波発生装置
1か月前
国立大学法人 東京大学
触覚電気刺激装置及び触覚電気刺激方法
3か月前
ISM株式会社
線維症治療又は予防薬
3か月前
日本電信電話株式会社
機械学習システム
3か月前
株式会社マンダム
炎症の程度の評価方法
1か月前
国立大学法人 東京大学
成形体の製造方法、熱成形体、及びその利用
3か月前
国立大学法人 東京大学
高血圧症評価システム及び高血圧症評価方法
2か月前
国立大学法人 東京大学
学習システム、学習方法、およびプログラム
2か月前
国立大学法人 東京大学
高速スキャンフーリエ変換分光器及び分光方法
2か月前
国立大学法人 東京大学
情報処理システム、プログラム及び情報処理方法
1か月前
国立大学法人 東京大学
横紋筋肉腫の検出方法およびそのバイオマーカー
1か月前
国立大学法人 東京大学
A/Dコンバータ、アナログ/デジタル変換方法
25日前
国立大学法人 東京大学
情報処理システム、プログラム及び情報処理方法
11日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ