TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024068416
公報種別
公開特許公報(A)
公開日
2024-05-20
出願番号
2022178852
出願日
2022-11-08
発明の名称
部品移載装置
出願人
ヤマハ発動機株式会社
代理人
個人
,
個人
主分類
H01L
21/52 20060101AFI20240513BHJP(基本的電気素子)
要約
【課題】効率よく部品に作用する荷重を制御し、部品の損傷を抑制するとともに吸着ヘッドによって部品を適切に吸着保持することが可能な部品移載装置を提供する。
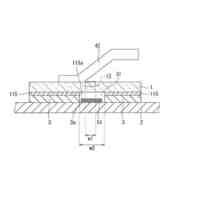
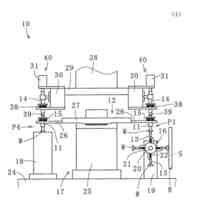
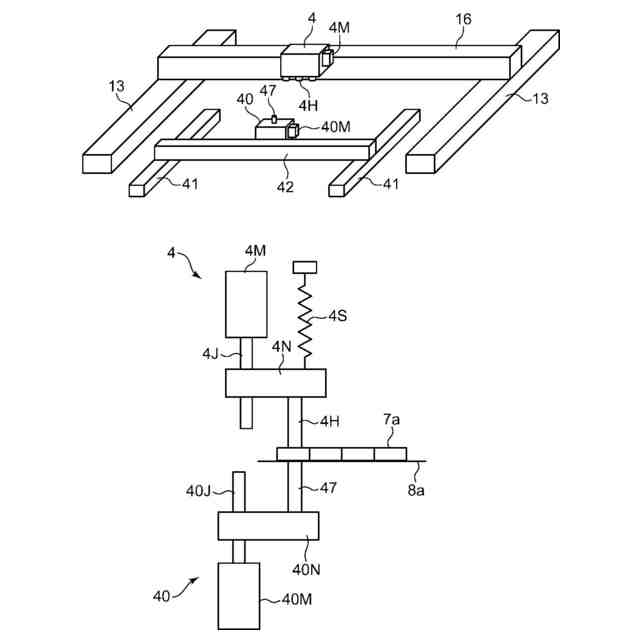
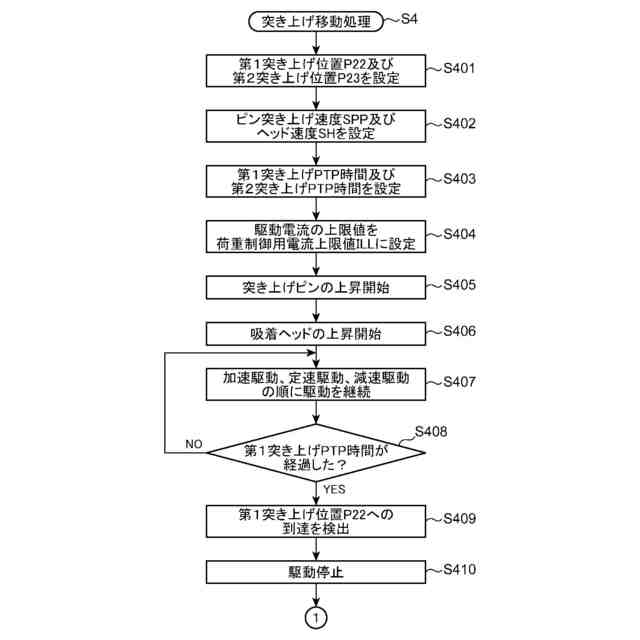
【解決手段】制御ユニット100は、吸着ヘッド4Hを昇降させるヘッド昇降モータ4Mと突き上げピン47を昇降させるピン昇降モータ40Mとの制御に関する処理として、突き上げ移動処理S4を行う。この突き上げ移動処理S4において制御ユニット100は、突き上げピン47の上昇移動の速度を吸着ヘッド4Hの上昇移動の速度よりも上回る速度に設定するとともに、ピン昇降モータ40M及びヘッド昇降モータ4Mの駆動電流について部品に目標荷重が作用するときの上限値を示す荷重制御用電流上限値ILLを設定する。そして制御ユニット100は、ピン昇降モータ40M及びヘッド昇降モータ4Mの駆動電流が荷重制御用電流上限値ILLを維持するように、各モータの駆動を制御する。
【選択図】図7
特許請求の範囲
【請求項1】
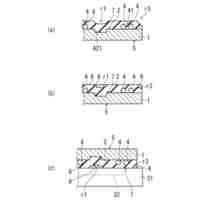
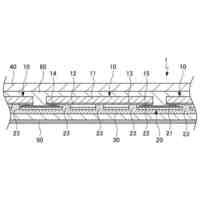
弾性変形可能なシート上に貼着された状態で複数の部品が配置される部品配置エリアを有する部品供給ユニットと、
前記部品配置エリアの上方において上下方向に移動可能に設けられ、前記シート上の前記部品を上方から吸着保持する吸着ヘッドと、前記吸着ヘッドを上下方向に移動させるヘッド昇降モータと、を有するヘッドユニットと、
前記部品配置エリアの下方において上下方向に移動可能に設けられ、前記吸着ヘッドによる吸着対象の前記部品を前記シートを介して下方から突き上げる突き上げピンと、前記突き上げピンを上下方向に移動させるピン昇降モータと、を有する突き上げユニットと、
前記ヘッド昇降モータ及び前記ピン昇降モータを制御する制御ユニットと、を備え、
前記制御ユニットは、
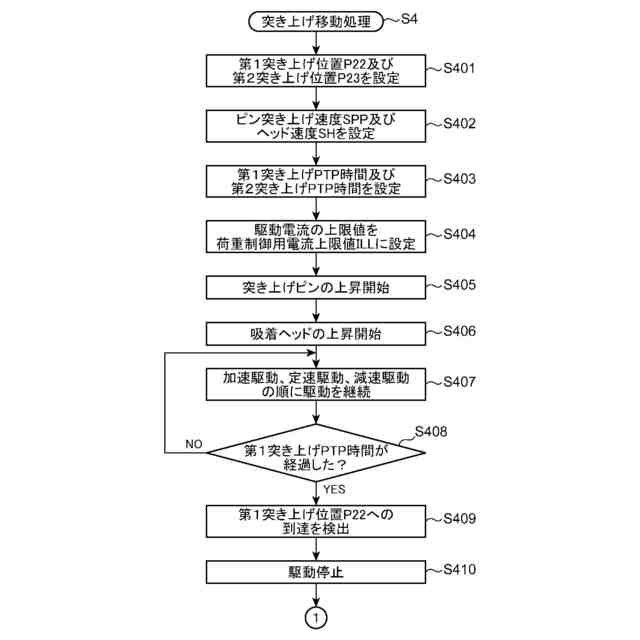
前記突き上げピンの先端が前記シートに接触するシート接触位置に配置されるとともに、前記吸着ヘッドの先端が前記シート上の前記部品に接触する部品接触位置に配置された状態で、前記突き上げピンの先端が前記シート接触位置よりも上方の突き上げ位置に到達するまで前記突き上げピンが上昇移動するように前記ピン昇降モータを制御するとともに、前記突き上げピンの上昇移動に応じて前記吸着ヘッドが上昇移動するように前記ヘッド昇降モータを制御する突き上げ移動処理を行い、
前記突き上げ移動処理では、前記突き上げピンの上昇移動の速度を前記吸着ヘッドの上昇移動の速度よりも上回る速度に設定するとともに、前記ピン昇降モータ及び前記ヘッド昇降モータの駆動電流について前記部品に目標荷重が作用するときの上限値を示す荷重制御用電流上限値を設定し、前記ピン昇降モータ及び前記ヘッド昇降モータの駆動電流が前記荷重制御用電流上限値を維持するように、前記突き上げピンの先端が前記突き上げ位置に到達するまで前記ピン昇降モータ及び前記ヘッド昇降モータの駆動を継続させる、部品移載装置。
続きを表示(約 730 文字)
【請求項2】
前記制御ユニットは、前記突き上げ移動処理において、前記突き上げピンが前記吸着ヘッドよりも早くに上昇移動を開始するように、前記ピン昇降モータ及び前記ヘッド昇降モータを制御する、請求項1に記載の部品移載装置。
【請求項3】
前記突き上げユニットは、前記ピン昇降モータに設けられたロータリーエンコーダを有し、
前記制御ユニットは、前記突き上げ移動処理において、前記ロータリーエンコーダから出力される信号に基づいて、前記突き上げピンの先端が前記突き上げ位置に到達したことを検出する、請求項1又は2に記載の部品移載装置。
【請求項4】
前記制御ユニットは、
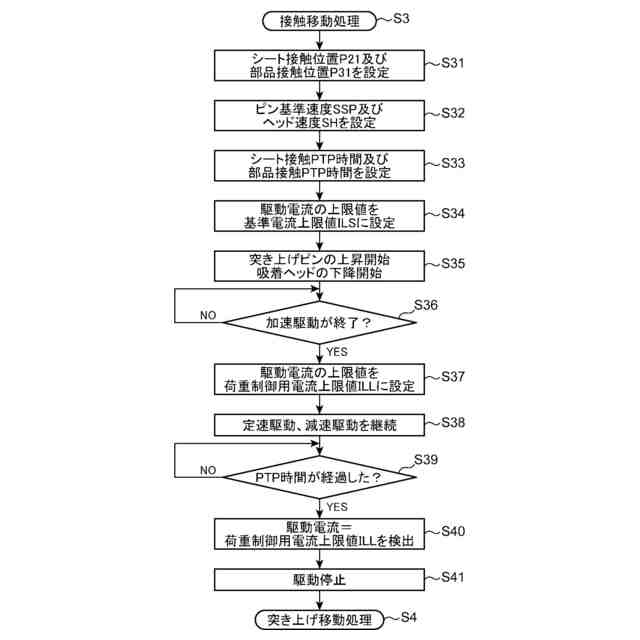
前記突き上げ移動処理の前処理として、前記突き上げピンの先端が前記シート接触位置に到達するまで前記突き上げピンが上昇移動するように前記ピン昇降モータを制御するとともに、前記吸着ヘッドの先端が前記部品接触位置に到達するまで前記吸着ヘッドが下降移動するように前記ヘッド昇降モータを制御する接触移動処理を行い、
前記接触移動処理では、前記ピン昇降モータ及び前記ヘッド昇降モータの駆動電流が前記荷重制御用電流上限値以下の範囲に収まるように、前記ピン昇降モータ及び前記ヘッド昇降モータを制御する、請求項1に記載の部品移載装置。
【請求項5】
前記制御ユニットは、前記接触移動処理において、前記ピン昇降モータ及び前記ヘッド昇降モータの駆動電流が前記荷重制御用電流上限値となったときに、前記突き上げピンの先端が前記シート接触位置に到達するとともに前記吸着ヘッドの先端が前記部品接触位置に到達したことを検出する、請求項4に記載の部品移載装置。
発明の詳細な説明
【技術分野】
【0001】
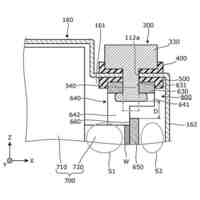
本発明は、部品配置エリアに配置された部品を上方から吸着保持する吸着ヘッドを有するヘッドユニットと、吸着ヘッドによる吸着対象の部品を下方から突き上げる突き上げピンを有する突き上げユニットと、を備えた部品移載装置に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
部品配置エリアにおいてシートに貼着された状態の部品をピックアップして基板等に移載する部品移載装置が知られている。この種の部品移載装置は、部品を上方から吸着保持する吸着ヘッドを有するヘッドユニットと、吸着ヘッドによる吸着対象の部品を下方から突き上げる突き上げピンを有する突き上げユニットと、を備える。部品移載装置では、シートに貼着された部品に対し、上方から吸着ヘッドが押圧するとともに下方から突き上げピンが突き上げる。部品移載装置では、吸着ヘッドによって吸着された状態の部品に対する突き上げピンによる突き上げ時において、部品に作用する荷重が大きすぎると部品に損傷が生じる一方、部品に作用する荷重が小さすぎると吸着ヘッドによって部品を適切に吸着保持できない虞がある。このため、部品移載装置では、部品に作用する荷重を制御する技術が必要となる。
【0003】
特許文献1には、部品に作用する荷重を制御する技術が開示されている。特許文献1に開示される技術では、突き上げピンの突き上げ動作に伴い部品に作用する突き上げ荷重を荷重測定器によって測定し、その測定結果に基づいて、吸着ヘッドの吸着動作に伴い部品に作用する押圧力を制御する。
【先行技術文献】
【特許文献】
【0004】
特開2004-273910号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示される技術では、部品に作用する荷重の制御は、荷重測定器の測定結果を待って行われるので、効率の低い制御であるという課題がある。
【0006】
本発明の目的は、効率よく部品に作用する荷重を制御し、部品の損傷を抑制するとともに吸着ヘッドによって部品を適切に吸着保持することが可能な部品移載装置を提供することである。
【課題を解決するための手段】
【0007】
本発明の一の局面に係る部品移載装置は、弾性変形可能なシート上に貼着された状態で複数の部品が配置される部品配置エリアを有する部品供給ユニットと、前記部品配置エリアの上方において上下方向に移動可能に設けられ、前記シート上の前記部品を上方から吸着保持する吸着ヘッドと、前記吸着ヘッドを上下方向に移動させるヘッド昇降モータと、を有するヘッドユニットと、前記部品配置エリアの下方において上下方向に移動可能に設けられ、前記吸着ヘッドによる吸着対象の前記部品を前記シートを介して下方から突き上げる突き上げピンと、前記突き上げピンを上下方向に移動させるピン昇降モータと、を有する突き上げユニットと、前記ヘッド昇降モータ及び前記ピン昇降モータを制御する制御ユニットと、を備える。前記制御ユニットは、前記突き上げピンの先端が前記シートに接触するシート接触位置に配置されるとともに、前記吸着ヘッドの先端が前記シート上の前記部品に接触する部品接触位置に配置された状態で、前記突き上げピンの先端が前記シート接触位置よりも上方の突き上げ位置に到達するまで前記突き上げピンが上昇移動するように前記ピン昇降モータを制御するとともに、前記突き上げピンの上昇移動に応じて前記吸着ヘッドが上昇移動するように前記ヘッド昇降モータを制御する突き上げ移動処理を行う。前記制御ユニットは、前記突き上げ移動処理では、前記突き上げピンの上昇移動の速度を前記吸着ヘッドの上昇移動の速度よりも上回る速度に設定するとともに、前記ピン昇降モータ及び前記ヘッド昇降モータの駆動電流について前記部品に目標荷重が作用するときの上限値を示す荷重制御用電流上限値を設定し、前記ピン昇降モータ及び前記ヘッド昇降モータの駆動電流が前記荷重制御用電流上限値を維持するように、前記突き上げピンの先端が前記突き上げ位置に到達するまで前記ピン昇降モータ及び前記ヘッド昇降モータの駆動を継続させる。
【0008】
この部品移載装置によれば、制御ユニットは、吸着ヘッドを昇降させるヘッド昇降モータと突き上げピンを昇降させるピン昇降モータとの制御に関する処理として、突き上げ移動処理を行う。この突き上げ移動処理において制御ユニットは、突き上げピンの上昇移動の速度を吸着ヘッドの上昇移動の速度よりも上回る速度に設定し、ピン昇降モータ及びヘッド昇降モータの駆動電流が荷重制御用電流上限値を維持するように、突き上げピンの先端が突き上げ位置に到達するまで各昇降モータの駆動を継続させる。この場合、シートに貼着された部品が突き上げピンと吸着ヘッドとの間に挟持された状態で、突き上げピン及び吸着ヘッドが上昇移動するときには、速度に関する設定によって突き上げピンが吸着ヘッドを上方へ押すように移動しようとするが、各昇降モータの駆動電流の荷重制御用電流上限値に基づく制御によって吸着ヘッドに対する突き上げピンの過度な上昇移動が規制される。これにより、突き上げピンの先端が突き上げ位置に到達するまで、突き上げピンと吸着ヘッドとの間の距離を一定に保つことができる。
【0009】
しかも、ピン昇降モータ及びヘッド昇降モータに供給される荷重制御用電流上限値は、シートに貼着された部品に目標荷重が作用するときの駆動電流の上限値に設定されている。このため、各昇降モータの駆動電流が荷重制御用電流上限値を維持するように制御されることにより、突き上げピンの先端が突き上げ位置に到達するまで突き上げピン及び吸着ヘッドが上昇移動するときには、突き上げピンと吸着ヘッドとの間に挟持された状態の部品に目標荷重が作用し続ける。これにより、従来技術のように荷重測定器を用いることなく、各昇降モータの駆動電流に関する荷重制御用電流上限値の設定に基づいて、効率よく部品に作用する荷重を目標荷重に制御することができる。このため、突き上げピン及び吸着ヘッドが上昇移動するときに、突き上げピンと吸着ヘッドとの間に挟持された状態の部品の損傷を抑制するとともに吸着ヘッドによって部品を適切に吸着保持することが可能となる。
【0010】
上記の部品移載装置において、前記制御ユニットは、前記突き上げ移動処理において、前記突き上げピンが前記吸着ヘッドよりも早くに上昇移動を開始するように、前記ピン昇降モータ及び前記ヘッド昇降モータを制御してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
テーブルタップ
8日前
個人
真空管回路
1日前
アルモテック株式会社
反射鏡
17日前
日星電気株式会社
電線被覆材
17日前
サンケン電気株式会社
半導体装置
2日前
HOYA株式会社
光源装置
17日前
沖電気工業株式会社
発光装置
19日前
株式会社大橋製作所
実装装置
1日前
株式会社GSユアサ
蓄電素子
1日前
株式会社GSユアサ
蓄電素子
1日前
株式会社GSユアサ
蓄電素子
1日前
オムロン株式会社
電源切替装置
17日前
オムロン株式会社
電源切替装置
17日前
日本無線株式会社
導波管接続構造
4日前
株式会社東京精密
ワーク加工方法
18日前
東レエンジニアリング株式会社
転写方法
2日前
トヨタ自動車株式会社
積層型電池
18日前
矢崎総業株式会社
扁平電線
3日前
株式会社東京精密
ワーク加工方法
18日前
株式会社東芝
高周波回路
10日前
LWJ株式会社
可変ハンドスイッチ
19日前
三菱電機株式会社
半導体装置
9日前
三菱電機株式会社
半導体装置
1日前
富士電機株式会社
半導体装置
18日前
三菱電機株式会社
半導体装置
1日前
富士電機株式会社
半導体装置
3日前
富士電機株式会社
半導体装置
3日前
トヨタ紡織株式会社
気液分離器
19日前
富士電機株式会社
発電システム
10日前
マクセル株式会社
電気化学素子
1日前
日亜化学工業株式会社
発光装置
19日前
上野精機株式会社
部品処理装置
19日前
ローム株式会社
面発光レーザ装置
3日前
帝国通信工業株式会社
固定抵抗器
18日前
トヨタ自動車株式会社
電池
2日前
株式会社カネカ
太陽電池モジュール
17日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ