TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024062719
公報種別
公開特許公報(A)
公開日
2024-05-10
出願番号
2022170748
出願日
2022-10-25
発明の名称
モータの制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
H02P
21/22 20160101AFI20240501BHJP(電力の発電,変換,配電)
要約
【課題】 モータのトルク制御に於いて、個々のモータの材料の違いによるトルク出力特性のばらつきの影響を抑制するトルクの補償のための個々のモータの運転状態毎の損失トルクを決定する処理をできるだけ容易にする。
【解決手段】モータMの制御装置は、モータから出力されるべき要求トルクを取得し、或る一つのモータについて運転状態毎に決定された損失トルクを取得し、モータのモータ定数と前記の一つのモータの運転状態毎に発生するトルクとにより決定される運転状態毎のトルク補正値を取得し、要求トルクを損失トルクとトルク補正値に基づいて補正してモータにて発生されるべきトルクの指令値を決定し、指令値のトルクを発生するようモータの作動を制御する。
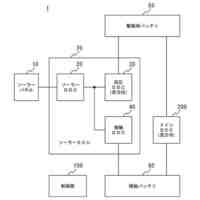
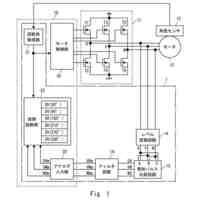
【選択図】 図1
特許請求の範囲
【請求項1】
モータの制御装置であって、
前記モータから出力されるべき要求トルクを取得する要求トルク取得手段と、
一つのモータについて運転状態毎に決定された損失トルクを取得する損失トルク取得手段と、
前記モータのモータ定数と前記一つのモータの運転状態毎に発生するトルクとにより決定される運転状態毎のトルク補正値を取得するトルク補正値取得手段と、
前記要求トルクを前記損失トルクと前記トルク補正値に基づいて補正して前記モータにて発生されるべきトルクの指令値を決定するトルク指令値決定手段と、
前記指令値のトルクを発生するようモータの作動を制御する作動制御手段と
を含む装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータの制御装置に係り、より詳細には、モータの発生するトルクを制御する装置に係る。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
モータのトルク制御精度や応答性は、モータのインダクタンスや電機子抵抗といったモータ定数が制御に於いて用いられる場合、その精度に影響されるので、そのようなモータ定数を同定する構成が種々提案されている。例えば、特許文献1では、ベクトル制御によって同期モータの作動を制御する制御装置に於いて、モータ定数を同定するために、モータの停止時に回転子を所定位置に引き込み、d軸とq軸とに、適宜、電流を与え、電圧・電流情報と回転子の位置情報とを用いて、同期モータと制御装置を含む系の電圧方程式に従ったモデルに含まれるパラメータを逐次推定し、推定されたパラメータからd軸とq軸に関するモータ定数を求める機能を持たせることが提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2008-182881
【発明の概要】
【発明が解決しようとする課題】
【0004】
一般に、モータから出力されるトルクは、鉄損などによる損失(損失トルク)のために、モータで生成されるトルクよりも低くなるので、トルク制御では、車両の駆動系などからモータに要求されるトルク(要求トルク)を実現するために、要求トルクに損失トルクを補償値として加算したトルク値が指令値としてモータの制御装置に与えられる。この点に関し、損失トルクは、モータの運転状態、即ち、発生トルク又は巻線電流、回転数、インバータへの投入電圧などに依存して変化するので、それらを変数パラメータとして、運転状態毎に実験的に決定されるところ、同じ仕様のモータであっても、個々のモータに使用された電磁鋼板、磁石に代表される材料の違いにより、損失トルクにばらつきが出るので、モータのトルク出力特性を揃えるためには、モータ毎に決定された運転状態毎の損失トルクを用いて出力トルクを補償する必要がある。
【0005】
ところで、モータの損失トルクは、個々のモータのモータ定数(インダクタンス、電機子鎖交磁束、巻線抵抗など)に依存するので、或る一つのモータについて運転状態毎の損失トルクが分かっていれば、その他のモータの運転状態毎の損失トルクは、各々のモータ定数を用いて或る一つのモータの運転状態毎の損失トルクから換算することが可能である。その場合、複数のモータの全てについて運転状態毎の損失トルクを実験的に調べる工程が不要となり、有利である。本発明に於いては、この知見が利用される。
【0006】
かくして、本発明の主な課題は、モータのトルク制御に於ける出力トルクの補償のための、個々のモータの運転状態毎の損失トルクを決定する処理をできるだけ容易に又は簡便にすることである。
【課題を解決するための手段】
【0007】
本発明によれば、上記の課題は、モータの制御装置であって、前記モータから出力されるべき要求トルクを取得する要求トルク取得手段と、一つのモータについて運転状態毎に決定された損失トルクを取得する損失トルク取得手段と、前記モータのモータ定数と前記一つのモータの運転状態毎に発生するトルクとにより決定される運転状態毎のトルク補正値を取得するトルク補正値取得手段と、前記要求トルクを前記損失トルクと前記トルク補正値に基づいて補正して前記モータにて発生されるべきトルクの指令値を決定するトルク指令値決定手段と、前記指令値のトルクを発生するようモータの作動を制御する作動制御手段とを含む装置によって達成される。
【0008】
上記の構成に於いて、「モータ」は、車両の駆動装置等から要求されるトルク(要求トルク)を出力するよう制御される形式のものであれば、任意のものであってよく、典型的には、dq変換を用いたベクトル制御により作動制御される永久磁石型同期モータであるが、これに限定されない。「損失トルク」とは、上記の如く、モータに於いて生成される全トルクのうちで出力として取り出されずに損失するトルク成分である。「運転状態」とは、ここに於いて、既に述べた如く、モータの発生トルク又は巻線電流、回転数、インバータへの投入電圧など、発生トルクを決定するパラメータとなる状態値(運転状態値)である。「一つのモータ」とは、本制御装置により作動が制御されるモータ(以下、「本モータ」と称する。)と同一の仕様の別のモータ(以下、「基準モータ」と称する。)であり、運転状態毎に損失トルクが任意の手法には決定された任意のモータであってよく、典型的には、或る仕様のモータについての適合に用いられる代表的なモータであってよい。「モータ定数」とは、モータ毎の入力電流又は電圧に対するトルク特性を決定する定数パラメータであり、具体的には、インダクタンス、電機子鎖交磁束、巻線抵抗などである。「トルク補正値」とは、基準モータの運転状態毎の損失トルクを本制御装置により制御されるモータ(本モータ)の運転状態毎の損失トルクに換算するための数値であり、後に詳述の如く、本モータのモータ定数と基準モータの運転状態毎の発生トルクとを用いて、典型的には運転状態毎に、予め算定される。「トルクの指令値」(トルク指令値)は、要求トルクと本モータの損失トルクとを合わせた、モータに於いて生成されるべき総トルクを表わす指令値である。
【0009】
上記の本発明の装置に於いては、モータ毎に使用された材料の違いによりばらつく運転状態毎の損失トルクが、各モータに於いて実験的に調べられるのではなく、或る一つのモータに於いて得られた運転状態毎の損失トルクから、各モータのモータ定数を用いて換算することにより得られることとなる。かかる構成によれば、或る一つのモータ以外の各モータについては、モータ定数を取得するだけでよく、各モータの適合に要する労力、時間及び費用が大幅に削減されることが期待される。
【0010】
上記の構成に於いて、損失トルクは、いくつかの運転状態値を変数としたマップとして準備されており、時々刻々の運転状態に応じてマップから値が拾い上げられてよい。トルク補正値は、同様に運転状態値を変数としたマップとして予め準備され、時々刻々の運転状態に応じてマップから値が拾い上げられてもよく、或いは、運転状態値を変数とした数式を用いて時々刻々の運転状態に応じて算出されてもよい。なお、トルク補正値は、運転状態値によって変化しない定数である場合も有り得る。運転状態毎のトルク補正値は、具体的には、運転状態毎に、基準モータにて発生するトルクと、本モータのモータ定数を用いた演算から得られる本モータにて発生するトルクの推定値との比率又は差分から決定されてよい。基準モータにて発生するトルクは、運転状態毎に実際に計測されたトルクでもよいし、基準モータのモータ定数を用いた演算により得られた発生するトルクの推定値でもよい。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
剥離装置
今日
トヨタ自動車株式会社
情報処理装置
今日
トヨタ自動車株式会社
ブリーザ装置
今日
トヨタ自動車株式会社
ソーラー充電システム
今日
トヨタ自動車株式会社
部材接続構造及び電池ケース
今日
トヨタ自動車株式会社
固体二次電池の短絡予測方法
今日
トヨタ自動車株式会社
車両用ドア構造及びその製造方法
今日
トヨタ自動車株式会社
板片の製造方法および打ち抜き機械
今日
トヨタ自動車株式会社
車両用の駆動装置とそれを備える車両
今日
トヨタ自動車株式会社
情報処理装置、情報処理方法、及び情報処理プログラム
今日
株式会社ジェイテクト
操舵制御装置及び操舵制御方法
今日
トヨタ自動車株式会社
情報処理装置、情報処理システム、情報処理方法及びプログラム
今日
トヨタ自動車株式会社
車両用表示装置、表示方法及びプログラム
今日
個人
2軸モーター
25日前
個人
配線器具用取付枠
8日前
ニデック株式会社
モータ
14日前
個人
スイッチング電源回路
4日前
個人
共振を用いた整流回路
今日
個人
バッテリーの補助装置
1か月前
株式会社ダイヘン
電源装置
14日前
株式会社アイシン
ロータ
7日前
ニチコン株式会社
電源装置
6日前
個人
すだれ型の薄膜太陽光発電装置
6日前
ニデック株式会社
モータ
6日前
株式会社アイシン
ステータ
7日前
日産自動車株式会社
ロータ
14日前
株式会社発明ラボックス
送受電システム
1日前
株式会社GSユアサ
無停電電源システム
1日前
中国電力株式会社
給電装置
6日前
トヨタ自動車株式会社
故障検出回路
1日前
トヨタ自動車株式会社
モータ
19日前
トヨタ自動車株式会社
故障検出回路
1日前
日産自動車株式会社
発電装置
1か月前
株式会社ミツバ
回転電機
4日前
株式会社ミツバ
回転電機
20日前
オムロン株式会社
電力変換装置
26日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ