TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025136416
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024034977
出願日
2024-03-07
発明の名称
オープン巻線モータ駆動装置
出願人
株式会社東芝
,
日本キヤリア株式会社
代理人
弁理士法人サトー
主分類
H02P
21/24 20160101AFI20250911BHJP(電力の発電,変換,配電)
要約
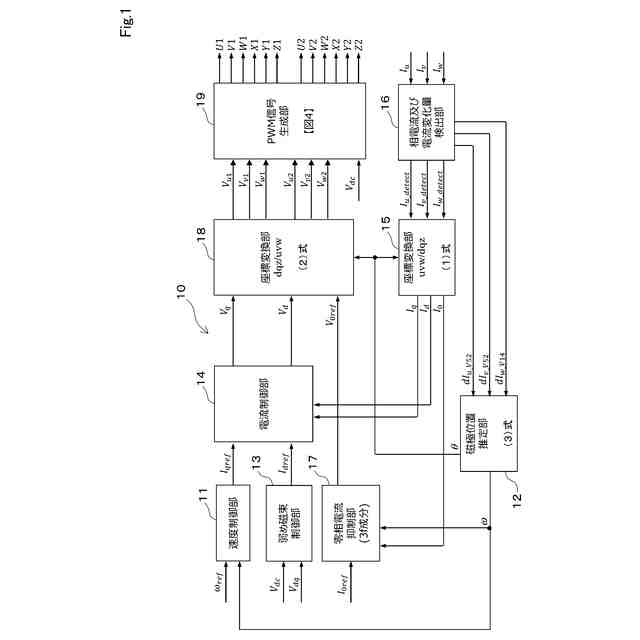
【課題】搬送波周期内で磁極位置推定に必要な3相の電流の高周波成分を確実に検出できるように2台のインバータによる3相PWM信号を生成可能なオープン巻線モータ駆動装置を提供する。
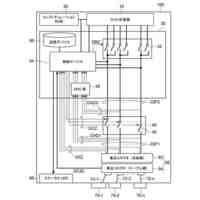
【解決手段】実施形態のオープン巻線モータ駆動装置は、オープン巻線構造モータの両端に接続される1次側及び2次側インバータをPWM制御する。PWM信号生成部は、64の電圧ベクトルにつき零相電圧を発生させず且つ前記モータの相間に作用する電圧を発生させない第2スイッチングパターンが2つ位置するポイントを中心とし、零相電圧を発生させず且つモータの相間に作用する電圧を発生させる第1スイッチングパターンが2つずつ位置するポイントを頂点とした六角形の空間ベクトルを6つのセクタに分割し、各セクタの前記1次側及び2次側インバータの3相のデューティ比をその大きさで分類した最大・中間・最小相毎に、電流変化量検出部が3相の電流値の差分を2回検出する時間を設けるように1次側及び2次側で同期して位相をシフトする。
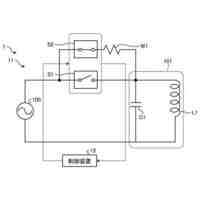
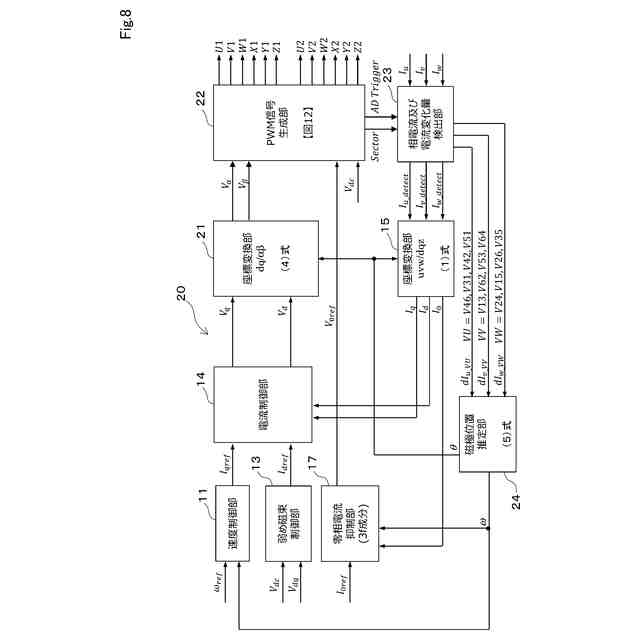
【選択図】図1
特許請求の範囲
【請求項1】
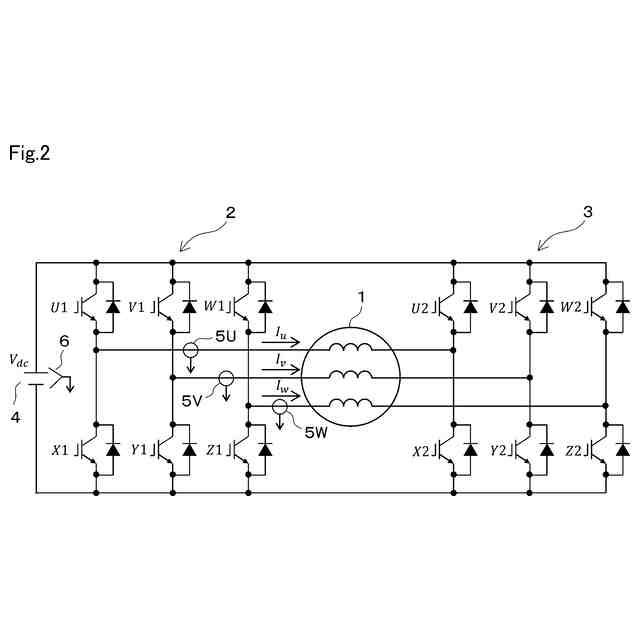
3相巻線がそれぞれ独立であり、6つの出力端子を備えるオープン巻線構造のモータの3つの出力端子に接続される1次側インバータと、
前記モータの残り3つの出力端子に接続される2次側インバータと、
前記モータに通電される3相電流を検出する電流検出部と、
2回検出した3相の電流値の差分を電流変化量として出力する電流変化量検出部と、
前記電流変化量に基づいて、前記モータの磁極位置を推定する磁極位置推定部と、
前記モータに通電する電流及び回転速度を制御する制御部と、
前記1次側及び2次側インバータと前記モータとの間を経路とし、前記モータの3相巻線を同方向に流れる零相電流を抑制する零相電流抑制部と、
前記制御部及び零相電流抑制部から得られる指令電圧と直流電圧に基づき算出した3相のデューティ比を搬送波と比較して、前記1次側及び2次側インバータそれぞれの3相PWM信号を生成するPWM信号生成部とを備え、
前記PWM信号生成部は、前記1次側及び2次側インバータのオンオフパターンの組合せである64の電圧ベクトルについて、零相電圧を発生させず且つ前記モータの相間に作用する電圧を発生させない第2スイッチングパターンが2つ位置するポイントを中心とし、零相電圧を発生させず且つ前記モータの相間に作用する電圧を発生させる第1スイッチングパターンが2つずつ位置するポイントを頂点とした六角形の空間ベクトルを6つのセクタに分割し、
各セクタの前記1次側及び2次側インバータの3相のデューティ比について、その大きさで分類した最大・中間・最小相毎に、前記電流変化量検出部が3相の電流値の差分を2回検出する時間を設けるように、1次側及び2次側で同期して位相をシフトするオープン巻線モータ駆動装置。
続きを表示(約 910 文字)
【請求項2】
3相巻線がそれぞれ独立であり、6つの出力端子を備えるオープン巻線構造のモータの3つの出力端子に接続される1次側インバータと、
前記モータの残り3つの出力端子に接続される2次側インバータと、
前記モータに通電される3相電流を検出する電流検出部と、
2回検出した3相の電流値の差分を電流変化量として出力する電流変化量検出部と、
前記電流変化量に基づいて、前記モータの磁極位置を推定する磁極位置推定部と、
前記モータに通電する電流及び回転速度を制御する制御部と、
前記制御部から得られる指令電圧と直流電圧とに基づき算出した3相のデューティ比を搬送波と比較して、前記1次側及び2次側インバータそれぞれの3相PWM信号を生成するPWM信号生成部とを備え、
前記PWM信号生成部は、前記1次側インバータの3相のPWM信号のうち第1相は、キャリア周期の中心又は前後端の位相を基準として遅れ側及び進み側の双方向にパルス幅を増減させ、
第2相は、キャリア周期の前端又は後端の位相を基準として遅れ側又は進み側の一方向にパルス幅を増減させ、
第3相は、前記第2相と逆の位相を基準として逆の一方向にパルス幅を増減させ、
前記2次側インバータの3相PWM信号については、第1相は、前記1次側インバータの第1相と異なる位相を基準として、遅れ側及び進み側の双方向にパルス幅を増減させ、
第2相及び第3相は、それぞれ前記1次側インバータの第2相及び第3と同じ位相を基準として逆方向にパルス幅を増減させ、
前記電流変化量検出部は、キャリア周期の前端及び後端付近で、3相又は2相の電流値の差分を2回検出するオープン巻線モータ駆動装置。
【請求項3】
前記1次側インバータに駆動用電源を供給する第1電源と、
前記2次側インバータに駆動用電源を供給する第2電源と、を備え、
前記電流変化量検出部は、キャリア周期の前端及び後端付近で、2相の電流値の差分を2回検出する請求項2記載のオープン巻線モータ駆動装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、2台のインバータにより駆動されるオープン巻線構造のモータの3相電流に基づいて、モータの磁極位置を推定する装置に関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
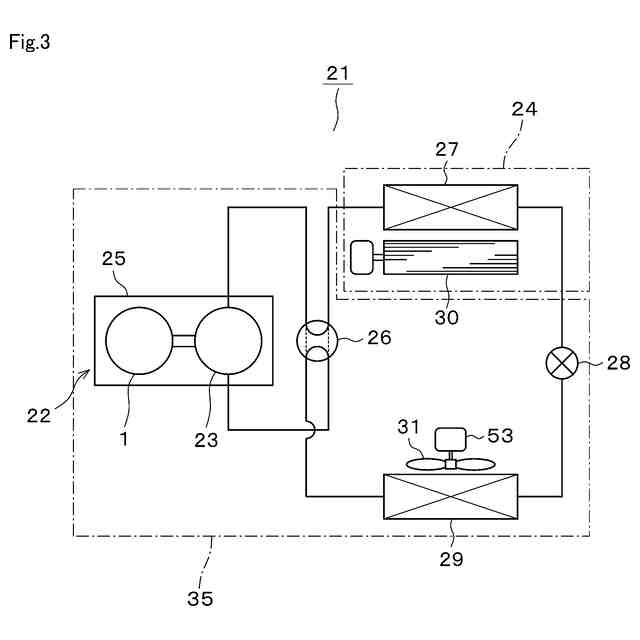
従来より、ロータに永久磁石を用いた永久磁石モータの1つであるDCブラシレスモータを適切に制御するために、磁極位置の検出が行われている。磁極位置の検出とは、モータの電気角座標上の位置である電気角位相を検出することである。磁極位置の検出には、ロータリエンコーダやレゾルバ、ホール素子等の位置センサを用いる方法もある。しかし、コストや構造上の制約の点から、位置センサを設けることができない場合もある。例えば、冷凍サイクル用の圧縮機モータの場合には、密閉容器からなる圧縮機の内部の冷媒充填空間内にモータが内蔵されるため、位置センサを取付けることができない。
【0003】
そこで、位置センサを用いずに、電流や電圧情報から磁極位置を推定する手法がある。このような手法には、例えば、誘起電圧利用型とインダクタンス利用型とがある。誘起電圧利用型は、モータの速度に比例する誘起電圧を、モータへの入力電圧及び電流より演算し、この誘起電圧に基づいて磁極位置を推定する手法である。この手法は、モータの回転により発生する誘起電圧が、磁極位置である電動機の電気角に応じて変化することを利用している。
【0004】
誘起電圧利用型は、モータの回転数が高い高速領域では十分な精度が得られる。しかし、回転数が低い低速領域では、誘起電圧の振幅が小さくなるか発生しないため、停止時や低速時には正確な位置推定ができない。
一方、インダクタンス利用型は、モータのインダクタンスを電流や電圧情報から算出し、磁極位置を推定する手法である。この手法は、モータのインダクタンスが、モータの電気角に応じて2倍の周期で変化することを利用している。インダクタンス利用型の推定方法として、例えば、駆動周波数に関係しないセンシングのための交流電圧信号をモータに印加し、電圧と電流の関係から磁極位置を推定する方法が幾つか提案されている。
【0005】
この手法でインダクタンスを求めるために印加する交流電圧信号の周波数は、キャリア周波数以下の数100Hz~数kHz程度であるが、モータの電流リプル周波数が人の可聴域に入ることから、騒音が増加してしまう。
この問題に対処するため、特許文献1では、3相のPWM信号のうち1相については、キャリア周期の任意の位相を基準として遅れ側、進み側の双方向にデューティを増減させ、他の1相についてはキャリア周期の任意の位相を基準として遅れ側、または進み側の一方向にデューティを増減させ、残りの1相についてはキャリア周期の任意の位相を基準として前記方向とは逆方向にデューティを増減させることで、高周波電流振幅を発生させ、騒音を抑制しながら磁極位置を推定する手法が提案されている。
【0006】
この手法では、キャリア周期内における固定された4点のタイミングで3相の電流をそれぞれ2回検出してそれらの差分値を求め、電流変化量に基づいてモータの推定磁極位置を求めている。よって、この方法は、突極比が小さい、又はインダクタンスが大きいというモータの電気的特性に依存することなく、ゼロ速度を含む極低速領域においても、位置センサレス方式により推定磁極位置を精度良く求めることが可能で、様々なモータに容易に適用できるという利点がある。
【先行技術文献】
【特許文献】
【0007】
特開2015-126565号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上記の技術は、1台のインバータにより1台のモータを駆動する場合に適用可能である。しかしながら、2台のインバータにより3相巻線がそれぞれ独立で、6つの巻線端子を備えるオープン巻線構造のモータを駆動する場合には適用できない。
そこで、オープン巻線構造のモータにおいて、搬送波周期内で、磁極位置推定に必要な3相の電流変化量を確実に検出できるように、2台のインバータによる3相PWM信号を生成可能なオープン巻線モータ駆動装置を提供する。
【課題を解決するための手段】
【0009】
実施形態のオープン巻線モータ駆動装置は、3相巻線がそれぞれ独立であり、6つの出力端子を備えるオープン巻線構造のモータの3つの出力端子に接続される1次側インバータと、
前記モータの残り3つの出力端子に接続される2次側インバータと、
前記モータに通電される3相電流を検出する電流検出部と、
2回検出した3相の電流値の差分を電流変化量として出力する電流変化量検出部と、
前記電流変化量に基づいて、前記モータの磁極位置を推定する磁極位置推定部と、
前記モータに通電する電流及び回転速度を制御する制御部と、
前記1次側及び2次側インバータと前記モータとの間を経路とし、前記モータの3相巻線を同方向に流れる零相電流を抑制する零相電流抑制部と、
前記制御部及び零相電流抑制部から得られる指令電圧と直流電圧に基づき算出した3相のデューティ比を搬送波と比較して、前記1次側及び2次側インバータそれぞれの3相PWM信号を生成するPWM信号生成部とを備え、
前記PWM信号生成部は、前記1次側及び2次側インバータのオンオフパターンの組合せである64の電圧ベクトルについて、零相電圧を発生させず且つ前記モータの相間に作用する電圧を発生させない第2スイッチングパターンが2つ位置するポイントを中心とし、零相電圧を発生させず且つ前記モータの相間に作用する電圧を発生させる第1スイッチングパターンが2つずつ位置するポイントを頂点とした六角形の空間ベクトルを6つのセクタに分割し、
各セクタの前記1次側及び2次側インバータの3相のデューティ比について、その大きさで分類した最大・中間・最小相毎に、前記電流変化量検出部が3相の電流値の差分を2回検出する時間を設けるように、1次側及び2次側で同期して位相をシフトする。
【0010】
また、実施形態のオープン巻線モータ駆動装置は、上記の1次側インバータからPWM信号生成部までの構成から零相電流抑制部を除いたものを同様に備え、
前記PWM信号生成部は、前記1次側インバータの3相のPWM信号のうち第1相は、キャリア周期の中心又は前後端の位相を基準として遅れ側及び進み側の双方向にパルス幅を増減させ、
第2相は、キャリア周期の前端又は後端の位相を基準として遅れ側又は進み側の一方向にパルス幅を増減させ、
第3相は、前記第2相と逆の位相を基準として逆の一方向にパルス幅を増減させ、
前記2次側インバータの3相PWM信号については、第1相は、前記1次側インバータの第1相と異なる位相を基準として、遅れ側及び進み側の双方向にパルス幅を増減させ、
第2相及び第3相は、それぞれ前記1次側インバータの第2相及び第3と同じ位相を基準として逆方向にパルス幅を増減させ、
前記電流変化量検出部は、キャリア周期の前端及び後端付近で、3相又は2相の電流値の差分を2回検出する。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社東芝
固定子
1か月前
株式会社東芝
センサ
1か月前
株式会社東芝
センサ
24日前
株式会社東芝
配線治具
2か月前
株式会社東芝
回転電機
2か月前
株式会社東芝
燃料電池
2か月前
株式会社東芝
電子機器
2か月前
株式会社東芝
回路素子
1か月前
株式会社東芝
搬送装置
2か月前
株式会社東芝
ドア構造
1か月前
株式会社東芝
判定装置
2か月前
株式会社東芝
立て看板
3か月前
株式会社東芝
遮断装置
2か月前
株式会社東芝
制御装置
3か月前
株式会社東芝
X線厚み計
1か月前
株式会社東芝
半導体装置
5日前
株式会社東芝
ラック装置
27日前
株式会社東芝
電動送風機
25日前
株式会社東芝
半導体装置
3か月前
株式会社東芝
半導体装置
3か月前
株式会社東芝
半導体装置
4か月前
株式会社東芝
半導体装置
3か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
半導体装置
3日前
株式会社東芝
電磁流量計
2か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
主幹制御器
2か月前
株式会社東芝
電力変換装置
1か月前
株式会社東芝
区分システム
3か月前
株式会社東芝
スイッチギヤ
3か月前
株式会社東芝
ディスク装置
26日前
株式会社東芝
走行システム
11日前
株式会社東芝
ディスク装置
3か月前
株式会社東芝
アンテナ装置
1か月前
株式会社東芝
ディスク装置
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ