TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025134307
公報種別
公開特許公報(A)
公開日
2025-09-17
出願番号
2024032136
出願日
2024-03-04
発明の名称
車両制御装置、車両制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
主分類
B60W
50/00 20060101AFI20250909BHJP(車両一般)
要約
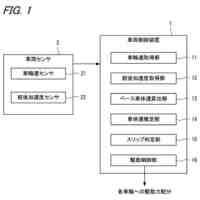
【課題】片側についてのみ認識された道路区画線に誤りがあり、地図情報と誤マッチングした場合であっても、自動運転の安定性を確保すること。
【解決手段】車両の進行方向に存在する道路区画線を認識する認識部と、認識された前記道路区画線と、記憶部に記憶された地図情報に基づく地図道路区画線とが一致するか否かを判定し、前記道路区画線が片側についてのみ認識された場合、認識された前記片側の道路区画線と、前記片側の地図道路区画線とが一致するか否かを判定する判定部と、認識された前記片側の道路区画線と、前記片側の地図道路区画線とが一致すると判定された場合、認識された前記片側の道路区画線に基づいて、前記片側の地図道路区画線を補正する補正部と、前記車両の走行制御を行う制御部と、を備える車両制御装置。
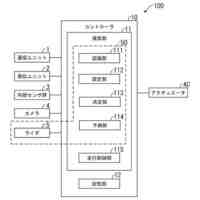
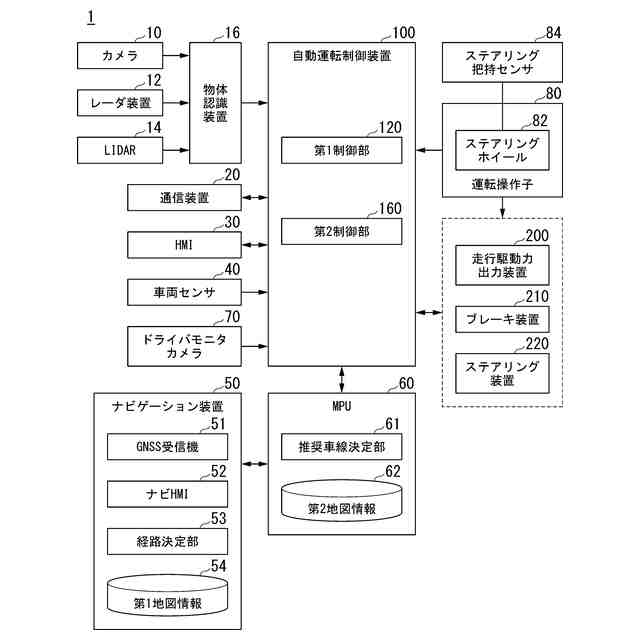
【選択図】図1
特許請求の範囲
【請求項1】
車両の進行方向に存在する道路区画線を認識する認識部と、
認識された前記道路区画線と、記憶部に記憶された地図情報に基づく地図道路区画線とが一致するか否かを判定し、前記道路区画線が片側についてのみ認識された場合、認識された前記片側の道路区画線と、前記片側の地図道路区画線とが一致するか否かを判定する判定部と、
認識された前記片側の道路区画線と、前記片側の地図道路区画線とが一致すると判定された場合、認識された前記片側の道路区画線に基づいて、前記片側の地図道路区画線を補正する補正部と、
前記車両の走行制御を行う制御部と、を備え、
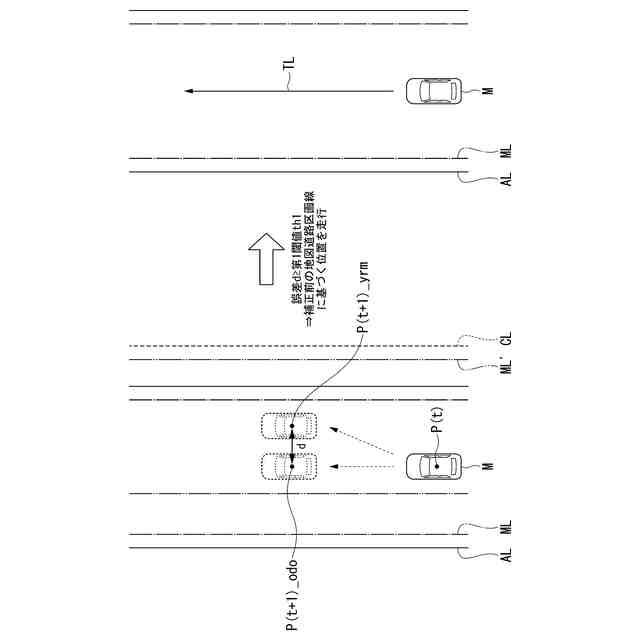
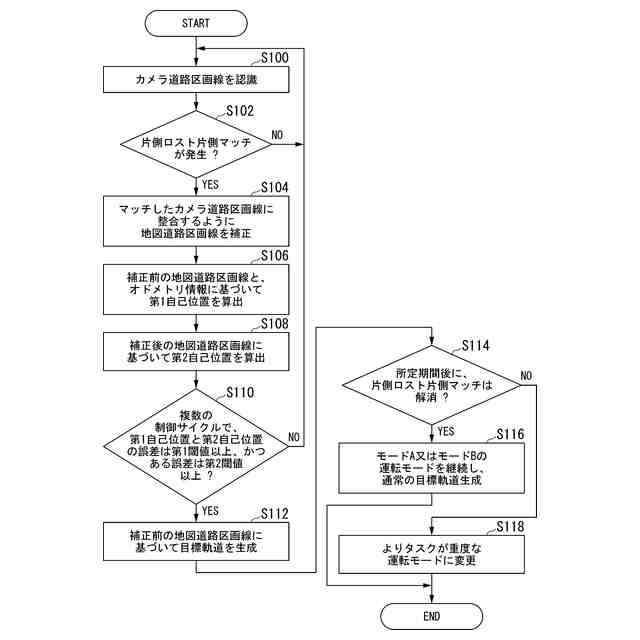
前記制御部は、前記車両の走行状態に基づいて補正前の前記片側の地図道路区画線に基づく前記車両の第1自己位置を算出するとともに、補正後の前記片側の地図道路区画線又は認識された前記片側の道路区画線に基づく前記車両の第2自己位置を算出し、前記第1自己位置と前記第2自己位置との間の誤差が第1閾値以上となる場合、補正前の地図道路区画線に基づく位置、又は認識された前記片側の道路区画線から前記補正前の地図道路区画線側にオフセットした再補正後の前記片側の地図道路区画線に基づく位置を走行するように前記車両の走行制御を行う、
車両制御装置。
続きを表示(約 1,700 文字)
【請求項2】
前記補正前の地図道路区画線に基づく位置は、複数の地図道路区画線の間に存在する位置である、
請求項1に記載の車両制御装置。
【請求項3】
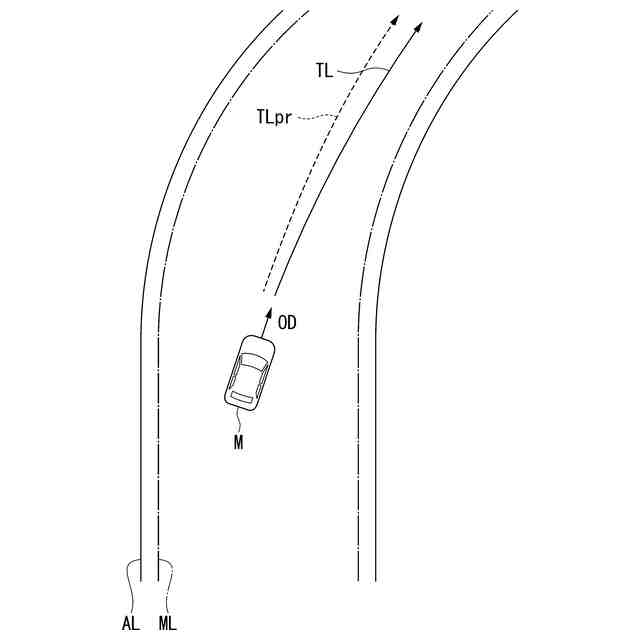
前記補正前の地図道路区画線に基づく位置は、前記車両が前記補正前の地図道路区画線に基づいて走行していた際の前記走行状態から予測される将来位置である、
請求項1に記載の車両制御装置。
【請求項4】
前記補正前の地図道路区画線に基づく位置は、複数の地図道路区画線の間に存在する位置を、前記車両が前記補正前の地図道路区画線に基づいて走行していた際の前記走行状態から予測される将来位置によって補正した位置である、
請求項1に記載の車両制御装置。
【請求項5】
前記制御部は、複数回算出された前記第1自己位置と前記第2自己位置との間の誤差が第1閾値以上となり、かつ前記複数回算出された誤差のうちいずれかの誤差が第2閾値以上となる場合、補正前の地図道路区画線に基づく位置を走行するように前記車両の走行制御を行う、
請求項1に記載の車両制御装置。
【請求項6】
前記制御部は、補正前の地図道路区画線に基づく位置を走行するように前記車両の走行制御を行っている状態が所定期間継続した場合、前記走行制御を停止する、
請求項1に記載の車両制御装置。
【請求項7】
車両に搭載されたコンピュータが、
車両の進行方向に存在する道路区画線を認識し、
認識された前記道路区画線と、記憶部に記憶された地図情報に基づく地図道路区画線とが一致するか否かを判定し、前記道路区画線が片側についてのみ認識された場合、認識された前記片側の道路区画線と、前記片側の地図道路区画線とが一致するか否かを判定し、
認識された前記片側の道路区画線と、前記片側の地図道路区画線とが一致すると判定された場合、認識された前記片側の道路区画線に基づいて、前記片側の地図道路区画線を補正し、
前記車両の走行制御を行い、
前記車両の走行状態に基づいて補正前の前記片側の地図道路区画線に基づく前記車両の第1自己位置を算出するとともに、補正後の前記片側の地図道路区画線又は認識された前記片側の道路区画線に基づく前記車両の第2自己位置を算出し、前記第1自己位置と前記第2自己位置との間の誤差が第1閾値以上となる場合、補正前の地図道路区画線に基づく位置、又は認識された前記片側の道路区画線から前記補正前の地図道路区画線側にオフセットした再補正後の前記片側の地図道路区画線に基づく位置を走行するように前記車両の走行制御を行う、
車両制御方法。
【請求項8】
車両に搭載されたコンピュータに、
車両の進行方向に存在する道路区画線を認識させ、
認識された前記道路区画線と、記憶部に記憶された地図情報に基づく地図道路区画線とが一致するか否かを判定し、前記道路区画線が片側についてのみ認識された場合、認識された前記片側の道路区画線と、前記片側の地図道路区画線とが一致するか否かを判定させ、
認識された前記片側の道路区画線と、前記片側の地図道路区画線とが一致すると判定された場合、認識された前記片側の道路区画線に基づいて、前記片側の地図道路区画線を補正させ、
前記車両の走行制御を行わせ、
前記車両の走行状態に基づいて補正前の前記片側の地図道路区画線に基づく前記車両の第1自己位置を算出するとともに、補正後の前記片側の地図道路区画線又は認識された前記片側の道路区画線に基づく前記車両の第2自己位置を算出し、前記第1自己位置と前記第2自己位置との間の誤差が第1閾値以上となる場合、補正前の地図道路区画線に基づく位置、又は認識された前記片側の道路区画線から前記補正前の地図道路区画線側にオフセットした再補正後の前記片側の地図道路区画線に基づく位置を走行するように前記車両の走行制御を行わせる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置、車両制御方法、およびプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
近年、交通参加者の中でも脆弱な立場にある人々にも配慮した持続可能な輸送システムへのアクセスを提供する取り組みが活発化している。この実現に向けて自動運転技術に関する研究開発を通して交通の安全性や利便性をより一層改善する研究開発に注力している。
【0003】
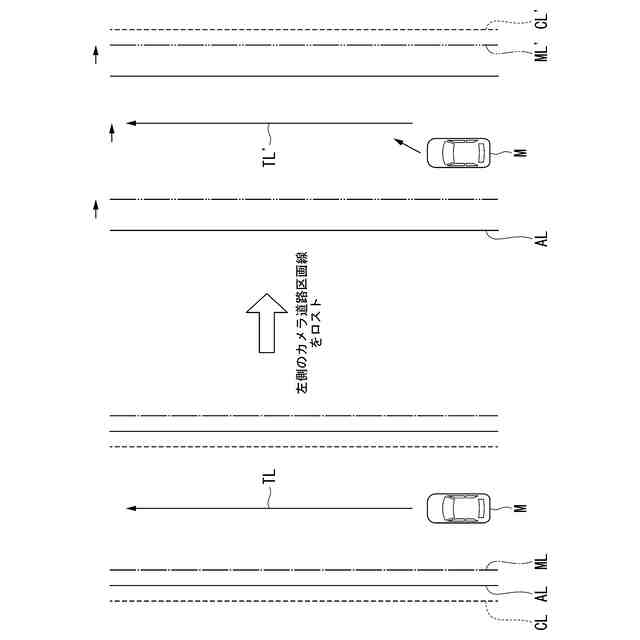
ところで、自動運転技術においては、カメラ画像から認識された道路区画線と、地図情報から認識された道路区画線との一致を確認し、両側又は片側について一致した道路区画線に基づいて自車両の目標軌道が生成し、生成された目標軌道に沿って自動運転又は運転支援が実行される。例えば、特許文献1には、カメラ画像から認識された道路区画線が片側についてのみ存在し、当該道路区画線と地図情報とがマッチする場合、自車両の自動運転を継続することが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-185787号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来技術は、片側についてのみ認識された道路区画線に誤りがあり、地図情報と誤マッチングした場合であっても、誤マッチングした道路区画線又は地図情報に基づいて、自車両の自動運転を継続するものである。その結果、誤マッチングした道路区画線又は地図情報を基準として特定された自車両の自己位置に横方向誤差が発生し、例えば、自車両が横方向に揺さぶられることによって、自動運転の安定性が損なわれる場合があった。
【0006】
本発明は、このような事情を考慮してなされたものであり、片側についてのみ認識された道路区画線に誤りがあり、地図情報と誤マッチングした場合であっても、自動運転の安定性を確保することができる車両制御装置、車両制御方法、およびプログラムを提供することを目的の一つとする。そして、延いては持続可能な輸送システムの発展に寄与するものである。
【課題を解決するための手段】
【0007】
この発明に係る車両制御装置は、以下の構成を採用した。
(1):この発明の一態様に係る車両制御装置は、車両の進行方向に存在する道路区画線を認識する認識部と、認識された前記道路区画線と、記憶部に記憶された地図情報に基づく地図道路区画線とが一致するか否かを判定し、前記道路区画線が片側についてのみ認識された場合、認識された前記片側の道路区画線と、前記片側の地図道路区画線とが一致するか否かを判定する判定部と、認識された前記片側の道路区画線と、前記片側の地図道路区画線とが一致すると判定された場合、認識された前記片側の道路区画線に基づいて、前記片側の地図道路区画線を補正する補正部と、前記車両の走行制御を行う制御部と、を備え、前記制御部は、前記車両の走行状態に基づいて補正前の前記片側の地図道路区画線に基づく前記車両の第1自己位置を算出するとともに、補正後の前記片側の地図道路区画線又は認識された前記片側の道路区画線に基づく前記車両の第2自己位置を算出し、前記第1自己位置と前記第2自己位置との間の誤差が第1閾値以上となる場合、補正前の地図道路区画線に基づく位置、又は認識された前記片側の道路区画線から前記補正前の地図道路区画線側にオフセットした再補正後の前記片側の地図道路区画線に基づく位置を走行するように前記車両の走行制御を行うものである。
【0008】
(2):上記(1)の態様において、前記補正前の地図道路区画線に基づく位置は、複数の地図道路区画線の間に存在する位置であるものである。
【0009】
(3):上記(1)の態様において、前記補正前の地図道路区画線に基づく位置は、前記車両が前記補正前の地図道路区画線に基づいて走行していた際の前記走行状態から予測される将来位置であるものである。
【0010】
(4):上記(1)の態様において、前記補正前の地図道路区画線に基づく位置は、複数の地図道路区画線の間に存在する位置を、前記車両が前記補正前の地図道路区画線に基づいて走行していた際の前記走行状態から予測される将来位置によって補正した位置であるものである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
23日前
本田技研工業株式会社
搬送装置
1か月前
本田技研工業株式会社
ロボット
21日前
本田技研工業株式会社
回転機械
22日前
本田技研工業株式会社
電解装置
6日前
本田技研工業株式会社
触媒インク
23日前
本田技研工業株式会社
鞍乗型車両
5日前
本田技研工業株式会社
触媒インク
23日前
本田技研工業株式会社
鞍乗り型車両
27日前
本田技研工業株式会社
鞍乗り型車両
13日前
本田技研工業株式会社
クラッチ装置
14日前
本田技研工業株式会社
鞍乗り型車両
15日前
本田技研工業株式会社
動力伝達装置
20日前
本田技研工業株式会社
鞍乗り型車両
22日前
本田技研工業株式会社
鞍乗り型車両
22日前
本田技研工業株式会社
作業システム
22日前
本田技研工業株式会社
位置推定装置
29日前
本田技研工業株式会社
車両制御装置
29日前
本田技研工業株式会社
導体接合方法
29日前
本田技研工業株式会社
電力変換装置
1か月前
本田技研工業株式会社
管理システム
1か月前
本田技研工業株式会社
物体検出装置
1か月前
本田技研工業株式会社
電力変換装置
1か月前
本田技研工業株式会社
電力変換装置
1か月前
本田技研工業株式会社
電流検出装置
1か月前
本田技研工業株式会社
電流検出装置
1か月前
本田技研工業株式会社
物体検出装置
1か月前
本田技研工業株式会社
薄板搬送装置
1か月前
本田技研工業株式会社
外界認識装置
1か月前
本田技研工業株式会社
車両制御装置
7日前
本田技研工業株式会社
ガス回収装置
1か月前
本田技研工業株式会社
潤滑システム
5日前
本田技研工業株式会社
車両制御装置
5日前
本田技研工業株式会社
固体二次電池
5日前
本田技研工業株式会社
水電解システム
19日前
本田技研工業株式会社
リーク検出装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ