TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025134266
公報種別
公開特許公報(A)
公開日
2025-09-17
出願番号
2024032063
出願日
2024-03-04
発明の名称
ステアリングシステム
出願人
トヨタ自動車株式会社
代理人
弁理士法人中部国際特許事務所
主分類
G09B
9/04 20060101AFI20250909BHJP(教育;暗号方法;表示;広告;シール)
要約
【課題】仮想モードを利用して運転に対するユーザの慣熟を促進することができるステアリングシステムを提供する。
【解決手段】本発明は、通常モードと仮想モードとが切り替え可能に構成されたステアバイワイヤ式のステアリングシステムであって、コントローラは、所定のギア比演算ルール及び制御用車速に基づいてステアリングギア比を演算し、通常モードでは、車両から取得した実車速情報に基づき演算された実車速を制御用車速として設定し、操作信号、制御用車速、及びステアリングギア比に基づいて車輪の目標転舵角を演算し、仮想モードでは、車両から取得したアクセル操作部材の動作に関するアクセル情報に基づき演算された仮想車速を制御用車速として設定し、操作信号、制御用車速、及びステアリングギア比に基づいて仮想移動体の目標転舵角である仮想目標転舵角を演算する。
【選択図】図1
特許請求の範囲
【請求項1】
ユーザによるステアリング操作のための操作部材及び前記操作部材に操作反力を付与する反力付与装置を含む操作装置と、
前記操作装置と機械的に分離され、供給される転舵電流に応じて車輪を転舵する転舵装置と、
前記操作装置から受信した前記操作部材の動作に関する操作信号に基づいて、前記転舵装置と前記反力付与装置とを制御するコントローラと、
を備え、前記操作信号に基づいて前記車輪を転舵する通常モードと、映像として作成された仮想移動体を前記操作信号に基づいて操舵する仮想モードとが切り替え可能に構成されたステアバイワイヤ式のステアリングシステムであって、
前記コントローラは、
所定のギア比演算ルール及び制御用車速に基づいてステアリングギア比を演算し、
前記通常モードでは、車両から取得した実車速情報に基づき演算された実車速を前記制御用車速として設定し、前記操作信号、前記制御用車速、及び前記ステアリングギア比に基づいて前記車輪の目標転舵角を演算し、
前記仮想モードでは、車両から取得したアクセル操作部材の動作に関するアクセル情報に基づき演算された仮想車速を前記制御用車速として設定し、前記操作信号、前記制御用車速、及び前記ステアリングギア比に基づいて前記仮想移動体の目標転舵角である仮想目標転舵角を演算する、
ステアリングシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ステアリングシステムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
昨今、操作部材と転舵装置とが機械的に分離されているステアバイワイヤ式のステアリングシステムにおいて、例えば電気自動車の充電中などに、ユーザが操作部材を利用してゲームをすることができるように構成されたステアリングシステムが開発されている。例えば特開2022-1925号公報には、操舵装置の操作部による操作対象を車両とゲーム上の仮想移動体とで切り替えることができる車両が開示されている。つまり、このようなステアリングシステムは、車両を操作対象とする通常モードと、仮想移動体を操作対象とするゲームモードとを切り替えられるように構成されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-1925号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ステアバイワイヤ式のステアリングシステムでは、ステアリング操作部材の操作角と車輪の転舵角との関係を表すステアリングギア比が可変となっている。ステアリングギア比は、車速の大小によって大きく変化する。したがって、このシステムが搭載された車両の運転には、ユーザの慣熟が必要となる。そこで、ゲームやシミュレータ機能を実現する仮想モードを利用して、ユーザの慣熟の促進を図ることが考えられる。しかし、従来のゲームやシミュレータでは、上記システムに対するユーザの慣熟促進は難しい。
【0005】
本発明の目的は、仮想モードを利用して運転に対するユーザの慣熟を促進することができるステアリングシステムを提供することである。
【課題を解決するための手段】
【0006】
本発明のステアリングシステムのコントローラは、所定のギア比演算ルール及び制御用車速に基づいてステアリングギア比を演算し、通常モードでは、車両から取得した実車速情報に基づき演算された実車速を前記制御用車速として設定し、操作信号、前記制御用車速、及び前記ステアリングギア比に基づいて前記車輪の目標転舵角を演算する。前記コントローラは、仮想モードでは、車両から取得したアクセル操作部材の動作に関するアクセル情報に基づき演算された仮想車速を前記制御用車速として設定し、前記操作信号、前記制御用車速、及び前記ステアリングギア比に基づいて仮想移動体の目標転舵角である仮想目標転舵角を演算する。
【発明の効果】
【0007】
ステアリングギア比は、一般にシミュレーション環境では反映されない。しかし、本発明によれば、ステアリングギア比が反映された転舵角の目標値に基づいて、仮想移動体が操舵される。つまり、ユーザは、仮想モードでの操作により、通常モードと同様に、車速に応じたステアリングギア比の変化を体感することができる。本発明によれば、ステアリングギア比可変のシステムにおけるユーザの運転の慣熟を促進させることができる。
【図面の簡単な説明】
【0008】
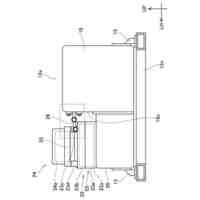
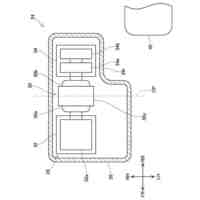
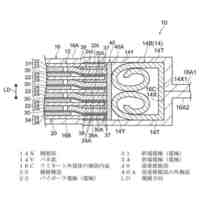
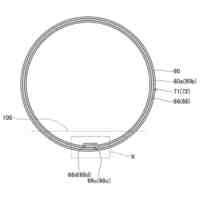
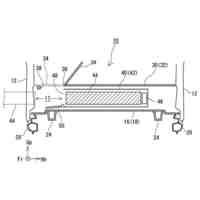
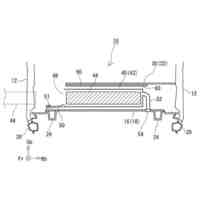
本実施形態のステアリングシステムの構成図である。
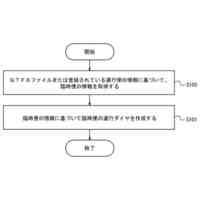
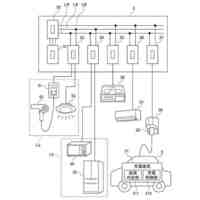
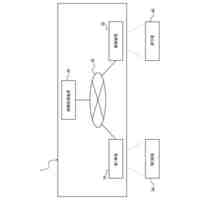
本実施形態のコントローラの機能を表す概念図である。
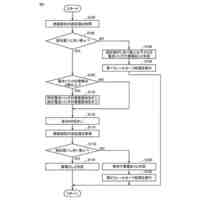
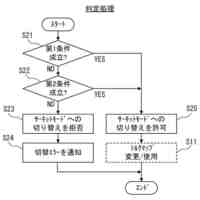
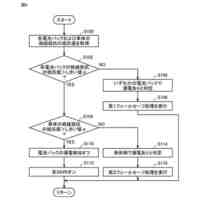
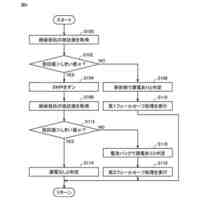
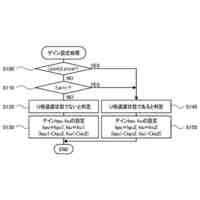
本実施形態の制御の一例を表すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明を実施するための形態として、本発明の一実施形態であるステアリングシステム1を、図を参照しつつ詳しく説明する。なお、本発明は、下記実施例の他、当業者の知識に基づいて種々の変更、改良を施した種々の形態で実施することができる。本実施形態のステアリングシステム1は、一例として電気自動車に搭載されている。車内の通信は、例えば、CAN(car area network or controllable area network)、FlexRay、又はEthernet等によって行われる。
【0010】
図1に示すように、ステアリングシステム1は、操作装置2と、転舵装置3と、コントローラ4と、を備えている。本実施形態の操作装置2は、操作部材20、ステアリングシャフト21、ステアリングコラム22、操作量センサ23、操作トルクセンサ24、及び反力付与装置25を備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
電池
27日前
トヨタ自動車株式会社
車両
23日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
方法
20日前
トヨタ自動車株式会社
電池
21日前
トヨタ自動車株式会社
電池
23日前
トヨタ自動車株式会社
電池
21日前
トヨタ自動車株式会社
車両
27日前
トヨタ自動車株式会社
車両
24日前
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
電池
1か月前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
23日前
トヨタ自動車株式会社
車両
23日前
トヨタ自動車株式会社
電池
1か月前
トヨタ自動車株式会社
装置
9日前
トヨタ自動車株式会社
装置
9日前
トヨタ自動車株式会社
電池
27日前
トヨタ自動車株式会社
ロータ
1か月前
トヨタ自動車株式会社
モータ
27日前
トヨタ自動車株式会社
電動車
24日前
トヨタ自動車株式会社
電動車
1か月前
トヨタ自動車株式会社
負極層
27日前
トヨタ自動車株式会社
電動車
27日前
トヨタ自動車株式会社
モータ
1か月前
トヨタ自動車株式会社
モータ
1か月前
トヨタ自動車株式会社
充電装置
1か月前
トヨタ自動車株式会社
電動車両
8日前
トヨタ自動車株式会社
制御装置
15日前
トヨタ自動車株式会社
電動車両
8日前
トヨタ自動車株式会社
電動車両
8日前
トヨタ自動車株式会社
路側装置
27日前
トヨタ自動車株式会社
電源装置
16日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ