TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025131106
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024028628
出願日
2024-02-28
発明の名称
推定装置
出願人
株式会社SOKEN
,
株式会社デンソー
代理人
名古屋国際弁理士法人
主分類
G01S
13/66 20060101AFI20250902BHJP(測定;試験)
要約
【課題】道路形状を利用することなく、物体の角速度を精度よく推定できるようにする。
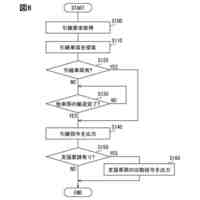
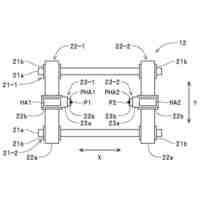
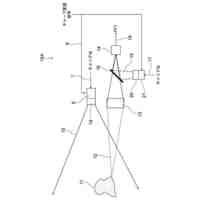
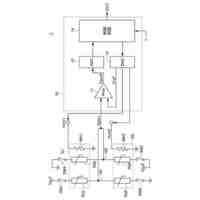
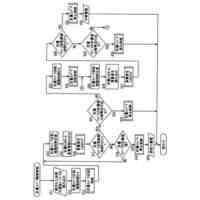
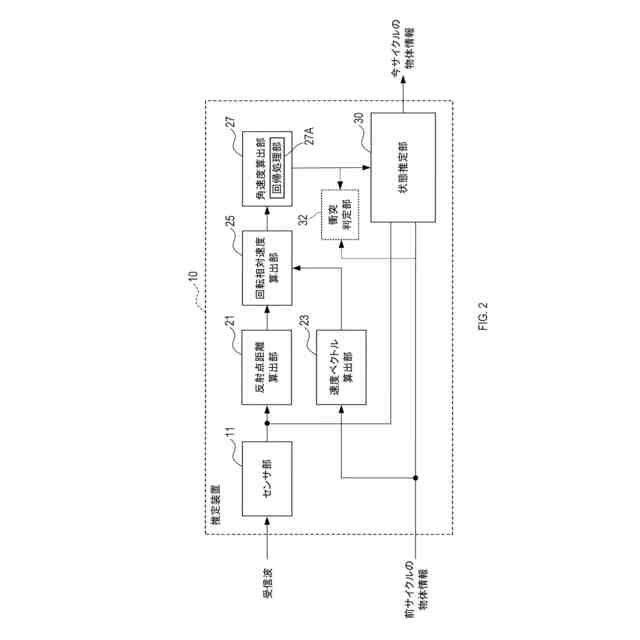
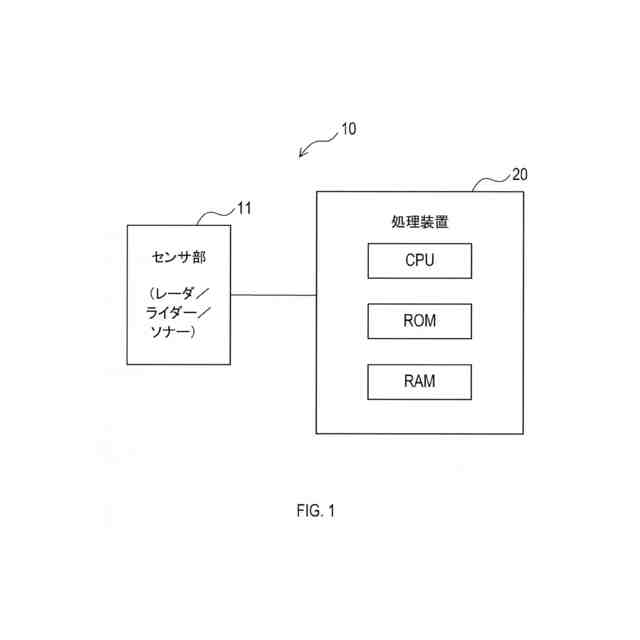
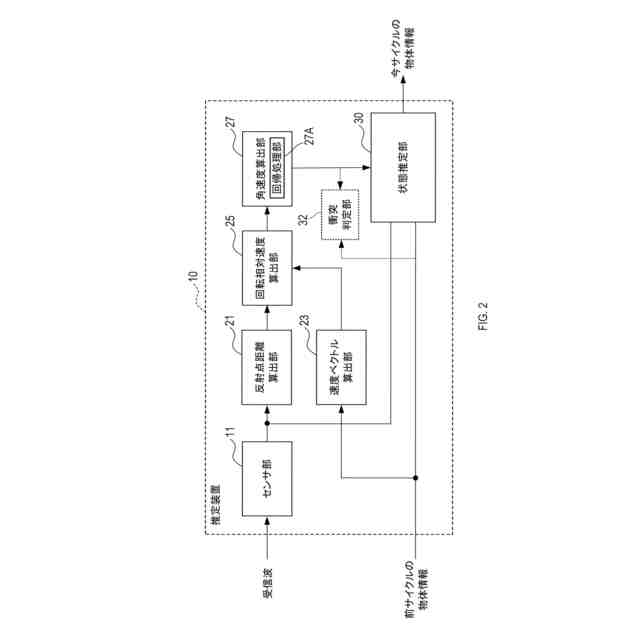
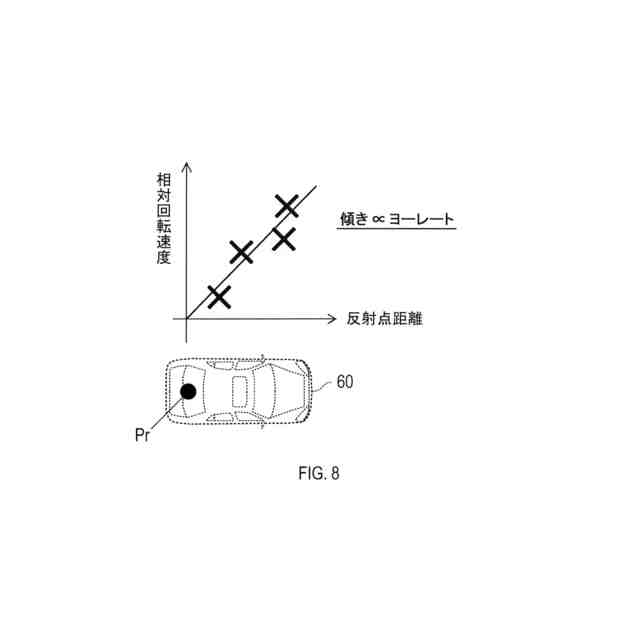
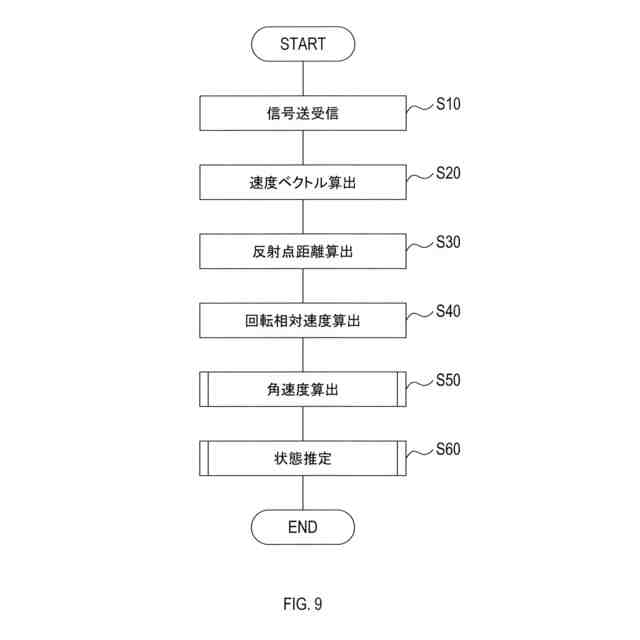
【解決手段】推定装置10は、センサ波を送受信して物体上の複数の反射点の位置及び相対速度を検出するセンサ部11と、物体の任意の基準点における速度ベクトルを算出する速度ベクトル算出部23と、基準点から反射点方位を傾きとする直線までの距離を算出する反射点距離算出部21と、反射点の相対速度から基準点の速度ベクトルによる反射点方位における相対速度を差し引くことで反射点の回転相対速度を算出する回転相対速度算出部25と、反射点距離算出部及び回転相対速度算出部にて算出された反射点距離及び回転相対速度に基づき物体の角速度を算出する角速度算出部27と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
移動体に搭載されて周囲の物体の状態を推定する推定装置であって、
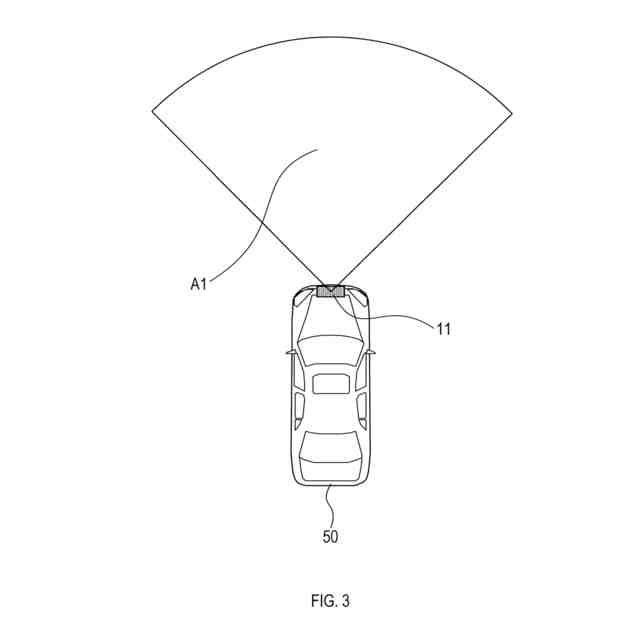
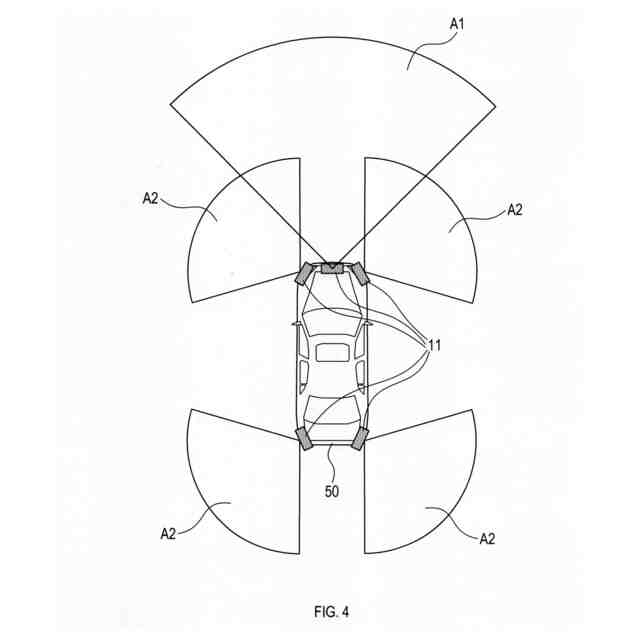
周囲にセンサ波を送信し、その反射波から前記物体上の複数の反射点の位置及び相対速度を検出するように構成されたセンサ部(11)と、
前記物体の任意の基準点の速度ベクトルを算出するように構成された速度ベクトル算出部(23)と、
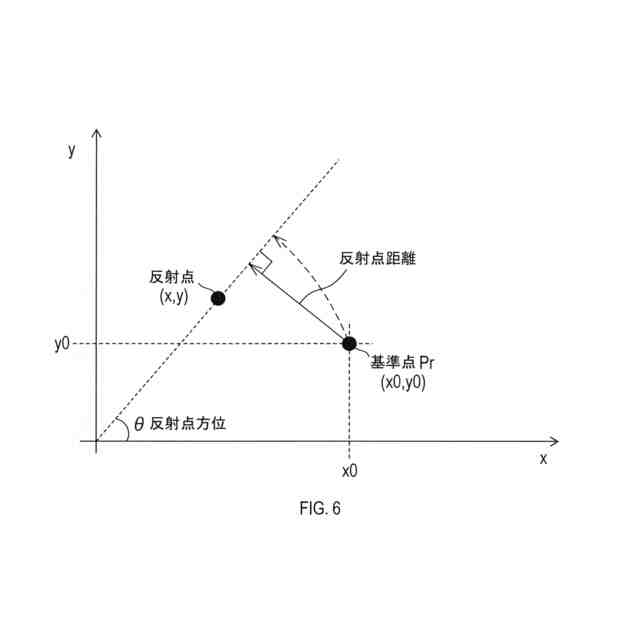
前記基準点から、前記センサ部にて検出された前記反射点方位を傾きとする直線までの距離を、反射点距離として算出するように構成された反射点距離算出部(21)と、
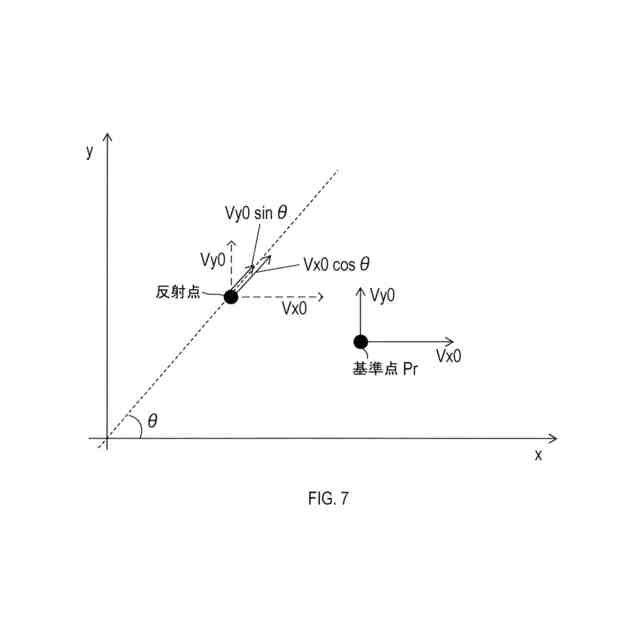
前記センサ部にて検出された前記反射点の相対速度から、前記速度ベクトル算出部にて算出された基準点の前記速度ベクトルによる前記反射点方位における相対速度を差し引いた値である、前記反射点の回転相対速度を算出するように構成された回転相対速度算出部(25)と、
前記反射点距離算出部及び前記回転相対速度算出部にて算出された、少なくとも1つの前記反射点の前記反射点距離及び前記回転相対速度に基づき、前記物体の角速度を算出するように構成された角速度算出部(27)と、
を備えている、推定装置。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載の推定装置であって、
前記角速度算出部は、少なくとも1つの前記反射点についての前記反射点距離に対する前記回転相対速度の大きさに基づき、前記角速度を算出するように構成されている、推定装置。
【請求項3】
請求項2に記載の推定装置であって、
前記角速度算出部は、
前記反射点距離と前記回転相対速度をパラメータとする座標空間における前記反射点の分布から線形回帰を行い、前記座標空間内での傾きを算出するように構成された回帰処理部(27A)を備え、
前記回帰処理部にて算出された傾きから前記角速度を算出するように構成されている、推定装置。
【請求項4】
請求項1~請求項3の何れか1項に記載の推定装置であって、
前記角速度算出部は、
前記センサ部にて検出された複数の前記反射点について、下記の判定条件a)~c)の少なくとも1つに基づき除外判定を行い、
a)前記反射波の受信電力が閾値以下である。
b)前記基準点との速度差が閾値以上である。
c)前記反射波が複数波である。
前記除外判定にて前記判定条件a)~c)の少なくとも1つに適合すると判定された前記反射点については、前記角速度の算出対象から除外するように構成されている、推定装置。
【請求項5】
請求項1~請求項3の何れか1項に記載の推定装置であって、
前記角速度算出部は、
前記物体との距離が所定の値以下、前記反射点の数が所定値以下、前記物体の加速度の絶対値が閾値以上、の何れかの条件を満たす場合は、前記角速度の算出を行わない、又は、前記角速度の算出結果を出力しない、ように構成されている、推定装置。
【請求項6】
請求項1~請求項3の何れか1項に記載の推定装置であって、
前記複数の反射点に対応する前記物体について、前記物体の状態を推定するように構成された状態推定部(30)を備え、
前記状態推定部は、前記物体の状態推定結果に、前記角速度算出部にて算出された前記角速度の算出値である角速度算出値を反映させるように構成されている、推定装置。
【請求項7】
請求項6に記載の推定装置であって、
前記状態推定部は、前記角速度算出部とは異なる手法で前記角速度を含む状態を推定するように構成され、前記物体の状態推定結果に含まれる前記角速度の推定結果である角速度推定値と、前記角速度算出部にて算出された前記角速度算出値とを混合し、前記角速度推定値を更新するように構成されている、推定装置。
【請求項8】
請求項6に記載の推定装置であって、
前記状態推定部は、前記角速度算出部とは異なる手法で前記角速度を含む状態を推定するように構成され、前記角速度算出部にて算出された前記角速度算出値の絶対値が所定の値以上の場合に、前記状態推定部にて前記物体の状態を推定するのに用いられるフィルタのフィルタゲインを増加させるように構成されている、推定装置。
【請求項9】
請求項6に記載の推定装置であって、
前記状態推定部は、前記状態推定部にて前記物体の状態の1つとして推定された前記物体の過去の速度ベクトルに基づき算出された、前記物体の現在の速度ベクトル予測値を、前記角速度算出部にて算出された前記角速度算出値にて補正するように構成されている、推定装置。
【請求項10】
請求項1~請求項3の何れか1項に記載の推定装置であって、
前記角速度算出部にて算出された前記角速度算出値を用いて、前記移動体と前記物体との衝突判定を行うように構成された衝突判定部(32)を備えている、推定装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体に搭載されて周囲の物体の状態を推定する推定装置に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
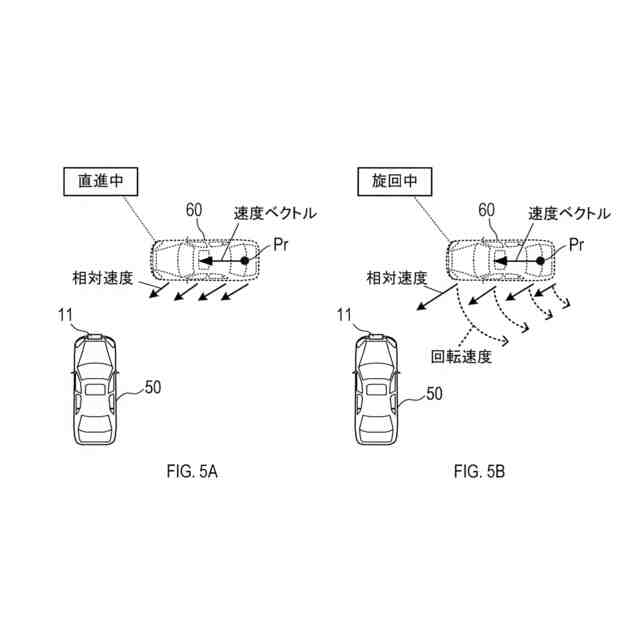
車載レーダにより物体追跡を行う際、物体の挙動が直進から旋回に変化する場合に追従が遅れることがある。これは、車載レーダによる物体観測には、観測誤差を抑制するために、予測と観測を混合するフィルタ処理が必要であるためである。つまり、フィルタ処理では、直進から旋回への移行時に、直進を仮定した予測が行われ、観測結果が物体の実際の挙動から乖離するためである。
【0003】
この問題を抑制する技術としては、フィルタのフィルタゲインを調整して追従性を確保することが一般的であるが、このような対策では、安定性が低下するおそれがある。これに対し、特許文献1には、道路形状にもとづき物体の進行方向及び角速度を推定することで、物体追跡時の追従性を向上させることが提案されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-60245号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の推定装置では、道路形状に基づき物体の進行方向及び角速度を推定することから、物体の状態が直進から旋回へ変化しても、その変化を瞬時に推定して、物体を精度よく追跡できるようになる。
【0006】
しかし、特許文献1に記載の推定装置では、例えば、物体が交差点に進入した場合など、物体が道路の分岐点を通過する際には、物体の進行方向を正確に予測することができないことから、角速度の推定精度も低下してしまう、という問題がある。
【0007】
本開示の1つの局面は、道路形状を利用することなく、物体の角速度を精度よく推定できるようにすることを目的とする。
【課題を解決するための手段】
【0008】
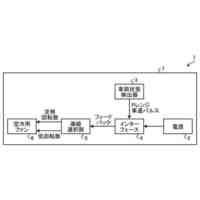
本開示の1つの態様による推定装置は、移動体に搭載されて周囲の物体の状態を推定する推定装置であり、センサ部(11)と、速度ベクトル算出部(23)と、反射点距離算出部(21)と、回転相対速度算出部(25)と、角速度算出部(27)と、を備える。
【0009】
このうち、センサ部は、周囲にセンサ波を送信し、その反射波から物体上の複数の反射点の位置及び相対速度を検出する。また、速度ベクトル算出部は、物体の任意の基準点における速度ベクトルを算出する。
【0010】
また、反射点距離算出部は、基準点から、センサ部で検出された反射点方位を傾きとする直線までの距離を、反射点距離として算出する。また、回転相対速度算出部は、センサ部にて検出された反射点の相対速度から、速度ベクトル算出部にて算出された速度ベクトルの反射点方位における相対速度を差し引いた値である、反射点の回転相対速度を算出する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社SOKEN
推定装置
3日前
株式会社SOKEN
電解セル
25日前
株式会社SOKEN
回転電機
23日前
株式会社SOKEN
吸音構造体
18日前
株式会社SOKEN
関節車輪機構
1か月前
株式会社SOKEN
電子制御装置
18日前
株式会社SOKEN
電動モビリティ
14日前
株式会社SOKEN
燃料電池システム
1日前
株式会社SOKEN
二次電池の製造方法
9日前
株式会社SOKEN
生体検出装置、生体検出方法
22日前
株式会社SOKEN
多導体伝送線路系の解析方法及び設計方法
2日前
株式会社SOKEN
車両制御装置、車両制御プログラム及び車両制御方法
21日前
株式会社SOKEN
インバータ制御装置、プログラム、インバータ制御方法
14日前
株式会社SOKEN
センシング装置、センシング装置による方法、及びプログラム
21日前
株式会社SOKEN
センシング装置、センシング装置による方法、及びプログラム
21日前
株式会社SOKEN
搬送制御システム、搬送制御装置、搬送車両、搬送制御方法、搬送制御プログラム
18日前
株式会社SOKEN
電力変換器の制御装置、電力変換システム、プログラム、及び電力変換器の制御方法
29日前
個人
計量スプーン
3日前
個人
微小振動検出装置
14日前
株式会社イシダ
X線検査装置
14日前
ユニパルス株式会社
力変換器
1か月前
三菱電機株式会社
計測器
29日前
日置電機株式会社
測定装置
1か月前
株式会社辰巳菱機
システム
23日前
IPU株式会社
距離検出装置
1か月前
株式会社FRPカジ
FRP装置
25日前
ダイハツ工業株式会社
測定用具
7日前
アンリツ株式会社
分光器
9日前
アンリツ株式会社
分光器
9日前
株式会社東芝
センサ
14日前
TDK株式会社
ガスセンサ
17日前
大和製衡株式会社
組合せ計量装置
25日前
富士レビオ株式会社
嵌合システム
28日前
株式会社精工技研
光電圧プローブ
15日前
TDK株式会社
磁気センサ
10日前
TDK株式会社
磁気センサ
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ