TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025129659
公報種別
公開特許公報(A)
公開日
2025-09-05
出願番号
2024026435
出願日
2024-02-26
発明の名称
車両製造システム、及び車両製造方法
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B62D
65/18 20060101AFI20250829BHJP(鉄道以外の路面車両)
要約
【課題】車両の走行を適切に制御することができる車両製造システム、及び車両製造方法を提供する。
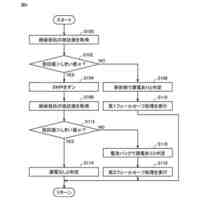
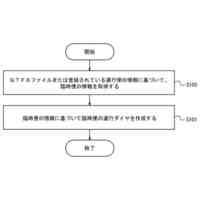
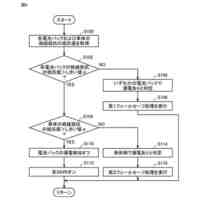
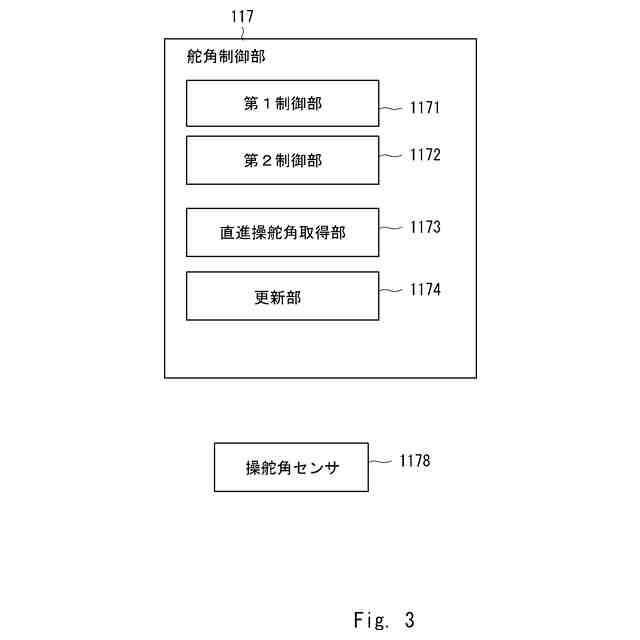
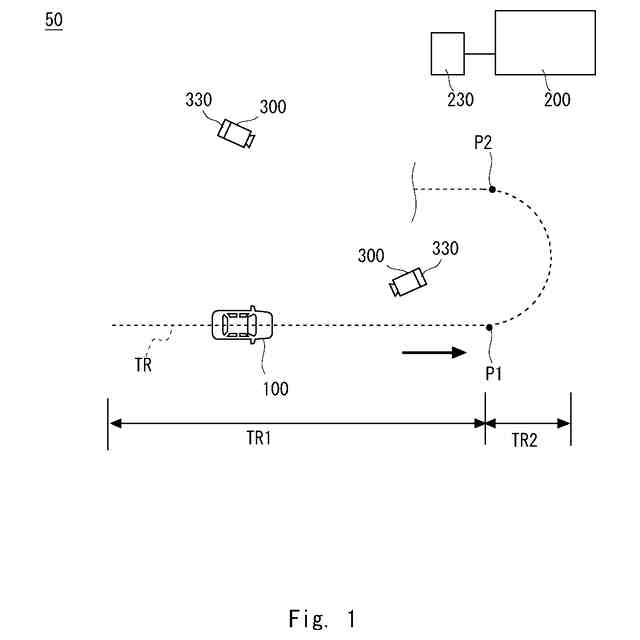
【解決手段】本実施形態にかかる車両製造システム50は、車両100の製造工程中において、直進操舵角の設定値を取得する取得手段と、車両100の横方向位置又は向きに関する位置情報を検出する検出手段と、第1期間において、車両100が直進経路TR1に沿って移動するよう、直進経路と位置情報とに応じて、車両の操舵角をフィードバック制御する第1制御手段と、第1期間における走行結果に応じて、直進操舵角の設定値を更新して、更新値を求める更新手段と、第2地点まで移動する第2期間において、第1制御手段での制御からフィードバック成分とフィートフォワード成分の配分を変えて操舵角を制御する第2制御手段と、第2制御手段と、を備えている。
【選択図】図3
特許請求の範囲
【請求項1】
車両の製造工程中において、直進操舵角の設定値を取得する取得手段と、
前記車両の横方向位置又は向きに関する位置情報を検出する検出手段と、
前記設定値を用いて前記車両が第1地点まで直進移動する第1期間において、前記車両が直進経路に沿って移動するよう、前記直進経路と前記位置情報に応じて、前記車両の操舵角を制御する第1制御手段と、
前記第1期間における走行結果に応じて、前記直進操舵角の設定値を更新して、更新値を求める更新手段と、
前記第1地点に到達した後に前記更新値を用いて第2地点まで移動する第2期間において、前記第1制御手段での制御からフィードバック成分とフィートフォワード成分の配分を変えて前記操舵角を制御する第2制御手段と、を備えた車両製造システム。
続きを表示(約 1,300 文字)
【請求項2】
前記第2制御手段は、前記第2期間では前記第1期間よりもフィードバック成分の配分を低くする請求項1に記載の車両製造システム。
【請求項3】
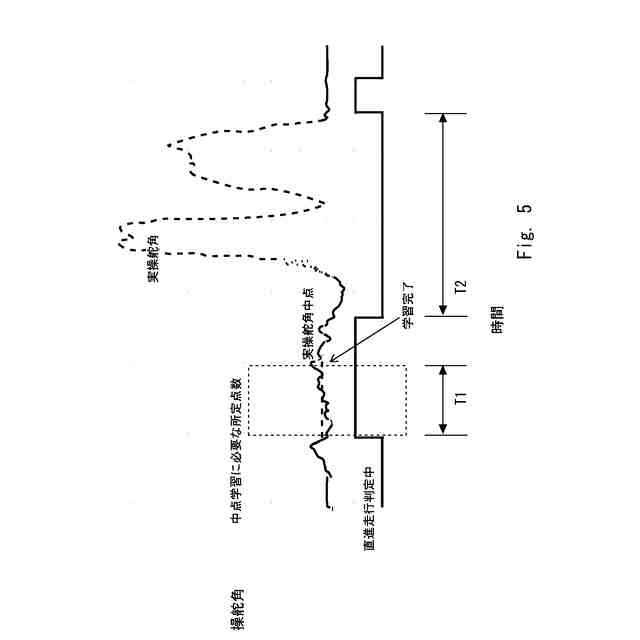
前記車両が直進走行しているか否かを判定する装置を備え、前記車両が直進走行をしていると前記装置が判定した期間の操舵角センサの分布に応じて、前記直進操舵角の更新値を求めている請求項1に記載の車両製造システム。
【請求項4】
前記第2制御手段は、
前記車両のサイズに関する車両情報と、目標経路の曲率に応じて、フィードフォワード制御における前記操舵角の目標値を決定して、
前記第2期間において、前記目標経路と、前記目標値に応じて操舵している時の前記位置情報との偏差情報に基づいて、前記操舵角をフィードバック制御している請求項3に記載の車両製造システム。
【請求項5】
前記取得手段は、操舵角を一端から他端までロックトゥロック操舵したときの中間値に基づいて、前記設定値を取得する請求項1~4のいずれか1項に記載の車両製造システム。
【請求項6】
前記第1期間では前記車両が前記第2期間の速度よりも低速で移動している請求項1~4のいずれか1項に記載の車両製造システム。
【請求項7】
車両の製造工程中において、直進操舵角の設定値を取得する取得ステップと、
前記車両の横方向位置又は向きに関する位置情報を検出する検出ステップと、
前記設定値を用いて前記車両が第1地点まで直進移動する第1期間において、前記車両が直進経路に沿って移動するよう、前記直進経路と前記位置情報とに応じて、前記車両の操舵角を制御する第1制御ステップと、
前記第1期間における走行結果に応じて、前記直進操舵角の設定値を更新して、更新値を求める更新ステップと、
前記第1地点に到達した後に前記更新値を用いて第2地点まで移動する第2期間において、前記第1制御ステップでの制御からフィードバック成分とフィートフォワード成分の配分を変えて前記操舵角を制御する第2制御ステップと、を備えた車両製造方法。
【請求項8】
第2制御ステップでは、前記第2期間では前記第1期間よりもフィードバック成分の配分を低くする請求項7に記載の車両製造方法。
【請求項9】
車両が直進走行しているか判定し、直進走行をしていると判定した期間の操舵角センサの分布に応じて、前記直進操舵角の更新値を求めている請求項7、又は8に記載の車両製造方法。
【請求項10】
前記第2制御ステップでは、
前記車両のサイズに関する車両情報と、目標経路の曲率に応じて、フィードフォワード制御における前記操舵角の目標値を決定して、
前記第2期間において、前記目標経路と、前記目標値に応じて操舵している時の前記位置情報との偏差情報に基づいて、前記操舵角をフィードバック制御している請求項9に記載の車両製造方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両製造システム、及び車両製造方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、車両の製造システムが開示されている。車両は自律制御又は遠隔制御により、車両を生産するためのシステム内を走行する。
【先行技術文献】
【特許文献】
【0003】
特開2017-538619号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
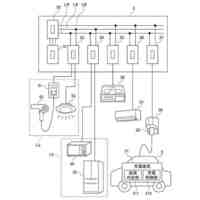
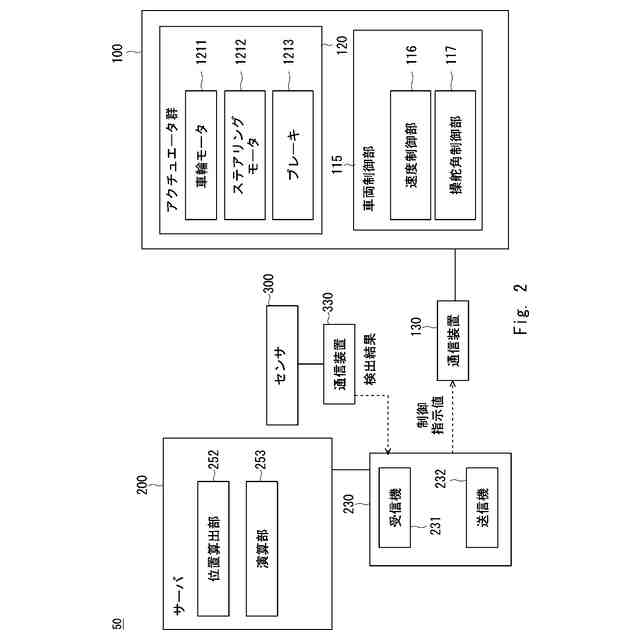
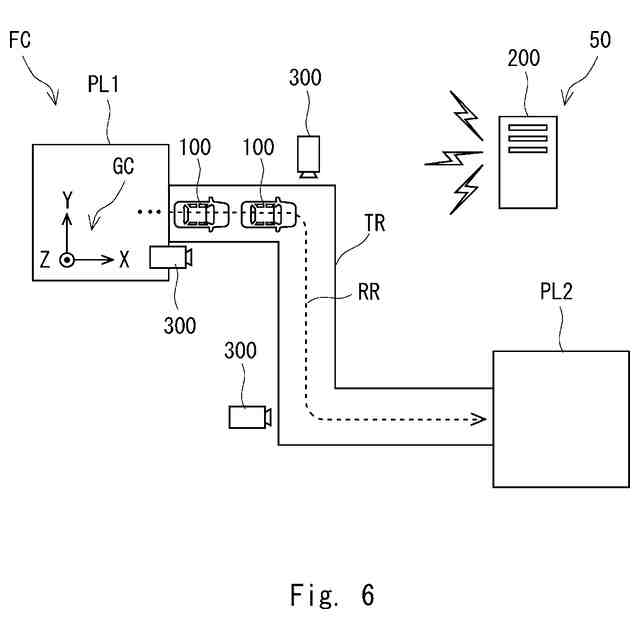
車両の製造工場では、複数の車両が自走搬送している。複数の車両が自走搬送する場合、それぞれの車両が制御指示値に従って制御される。例えば、車両は、サーバなどから制御指示値を受信すると、制御指示値になるように走行速度や操舵角を制御している。そして、車両が工場内の走路に沿って移動している。
【0005】
このような車両を制御するためには、操舵を精度良く制御する必要がある。しかしながら、製造工程中において、ステアリングモータなどが調整されていない状態では、操舵角を精度良く制御することができないおそれがある。例えば、車両が直進する時の直進操舵角を基準値として、車両が、ステアリングモータを制御する。ステアリングモータやステアリング機構に個体差などがある場合、直進操舵角を精度良く求めることが望まれる。
【0006】
そこで本開示の目的は、車両の走行を適切に制御することができる車両製造システム、及び車両製造方法を提供することである。
【課題を解決するための手段】
【0007】
本開示にかかる車両製造システムは、車両の製造工程中において、直進操舵角の設定値を取得する取得手段と、前記車両の横方向位置又は向きに関する位置情報を検出する検出手段と、前記設定値を用いて前記車両が第1地点まで直進移動する第1期間において、前記車両が直進経路に沿って移動するよう、前記直進経路と前記位置情報に応じて、前記車両の操舵角を制御する第1制御手段と、前記第1期間における走行結果に応じて、前記直進操舵角の設定値を更新して、更新値を求める更新手段と、前記第1地点に到達した後に前記更新値を用いて第2地点まで移動する第2期間において、前記第1制御手段での制御からフィードバック成分とフィートフォワード成分の配分を変えて前記操舵角を制御する第2制御手段と、を備えている。
を備えている。
【0008】
上記の車両製造システムにおいて、前記第2制御手段は、前記第2期間では前記第1期間よりもフィードバック成分の配分を低くするようにしてもよい。
【0009】
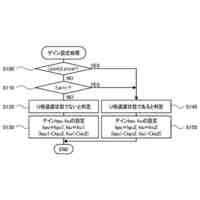
上記の車両製造システムにおいて、車両が直進走行しているか判定する装置を備え、前記車両が直進走行をしていると前記装置が判定した期間の操舵角センサの分布に応じて、前記直進操舵角の更新値を求めるようにしてもよい。
【0010】
上記の車両製造システムにおいて、前記第2制御手段は、前記車両のサイズに関する車両情報と、目標経路の曲率に応じて、フィードフォワード制御における前記操舵角の目標値を決定して、前記第2期間において、前記目標経路と、前記目標値に応じて操舵している時の前記位置情報との偏差情報に基づいて、前記操舵角をフィードバック制御するようにしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
電池
9日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
電池
15日前
トヨタ自動車株式会社
電池
15日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
電池
18日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
方法
8日前
トヨタ自動車株式会社
電池
11日前
トヨタ自動車株式会社
電池
19日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
19日前
トヨタ自動車株式会社
電池
9日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
電動車
12日前
トヨタ自動車株式会社
モータ
19日前
トヨタ自動車株式会社
モータ
19日前
トヨタ自動車株式会社
負極層
15日前
トヨタ自動車株式会社
ロータ
19日前
トヨタ自動車株式会社
電動車
19日前
トヨタ自動車株式会社
電動車
15日前
トヨタ自動車株式会社
モータ
15日前
トヨタ自動車株式会社
モータ
24日前
トヨタ自動車株式会社
ロータ
24日前
トヨタ自動車株式会社
送電装置
4日前
トヨタ自動車株式会社
充電装置
18日前
トヨタ自動車株式会社
蓄電装置
16日前
トヨタ自動車株式会社
通信装置
4日前
トヨタ自動車株式会社
制御装置
3日前
トヨタ自動車株式会社
駆動装置
19日前
トヨタ自動車株式会社
蓄電装置
16日前
トヨタ自動車株式会社
蓄電装置
16日前
トヨタ自動車株式会社
報知装置
12日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ