TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025124403
公報種別
公開特許公報(A)
公開日
2025-08-26
出願番号
2024020432
出願日
2024-02-14
発明の名称
無人飛行体および飛行システム
出願人
三菱電機株式会社
代理人
個人
主分類
B64U
10/60 20230101AFI20250819BHJP(航空機;飛行;宇宙工学)
要約
【課題】無人飛行体がケーブル係留装置よりも上方および下方の何れに移動した場合であっても、ケーブルがプロペラに接触することを防止できる無人飛行体を得ること。
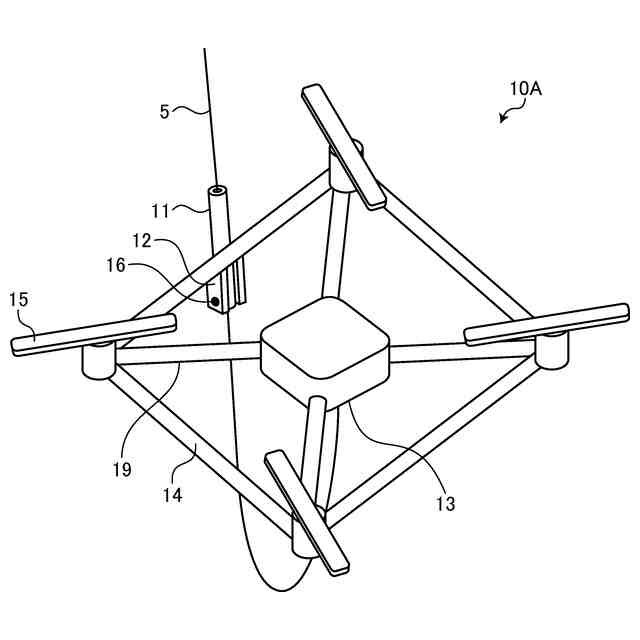
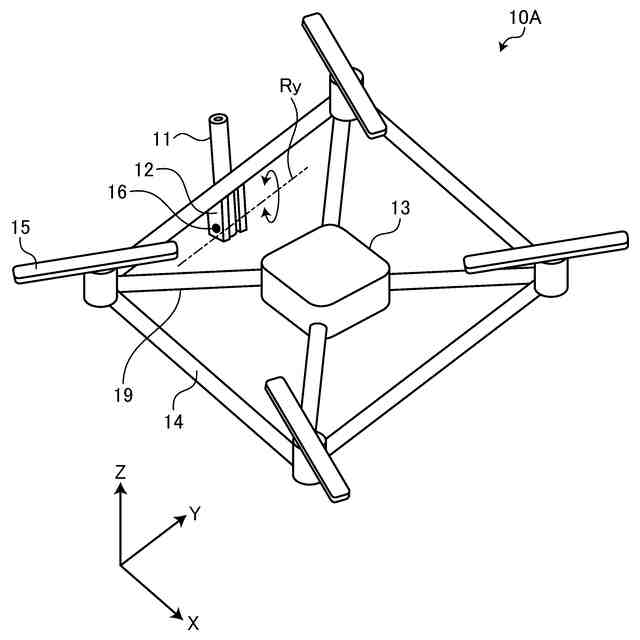
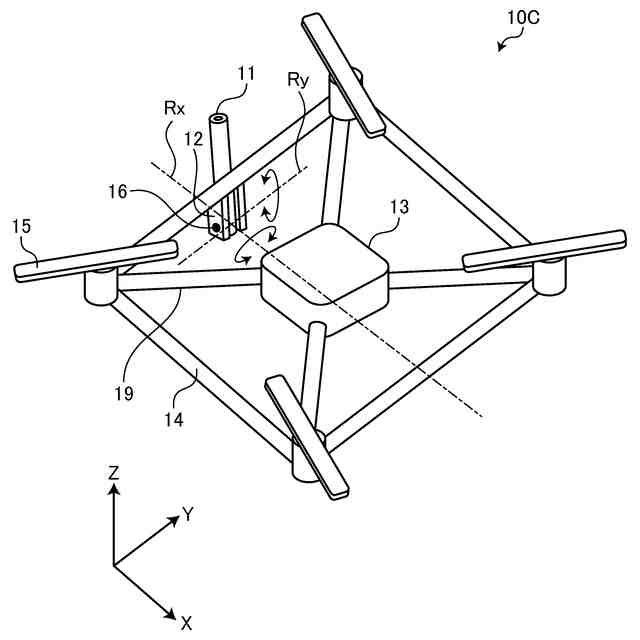
【解決手段】無人飛行体10Aは、ケーブル5を介してケーブル係留装置に接続されるケーブル接続部13と、筒状の部材によってケーブル係留装置とケーブル接続部13との間でケーブル5を貫通させるとともに回動するケーブルガイド11とを備え、ケーブルガイド11は、ケーブル接続部13から離れた位置に配置されるとともに、プロペラ15の可動域に含まれない面内で回動することで、ケーブルガイド11の一方の端部をプロペラ15よりも高い位置からプロペラ15よりも低い位置まで移動させる。
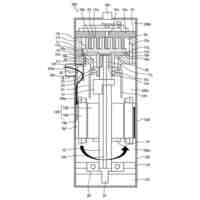
【選択図】図2
特許請求の範囲
【請求項1】
ケーブルを介してケーブル係留装置に接続されるケーブル接続部と、
回転力を推進力へと変換するプロペラと、
前記ケーブル接続部および前記プロペラに接続されるフレームと、
前記プロペラの回転面に垂直な軸方向に延設された筒状の部材によって前記ケーブル係留装置と前記ケーブル接続部との間で前記ケーブルを貫通させるとともに回動するケーブルガイドと、
前記ケーブルガイドの部材上に配置されるとともに前記ケーブルガイドの延設方向に垂直な第1の回動軸によって前記ケーブルガイドを回動させる回動軸部と、
を備え、
前記ケーブルガイドは、前記ケーブル接続部から離れた位置に配置されるとともに、前記プロペラの可動域に含まれない面内で回動することで、前記ケーブルガイドの一方の端部を前記プロペラよりも高い位置から前記プロペラよりも低い位置まで移動させる、
ことを特徴とする無人飛行体。
続きを表示(約 1,300 文字)
【請求項2】
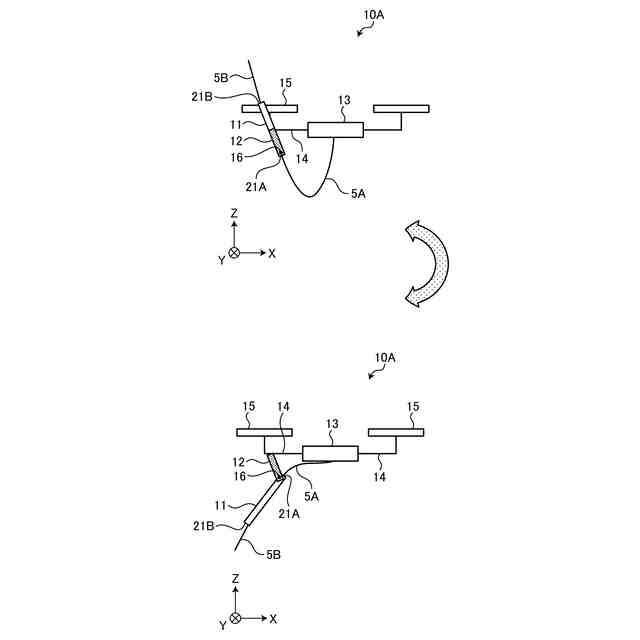
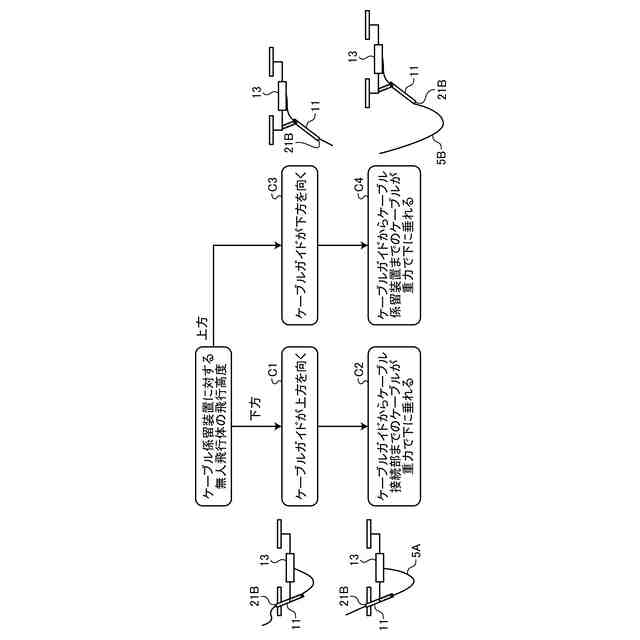
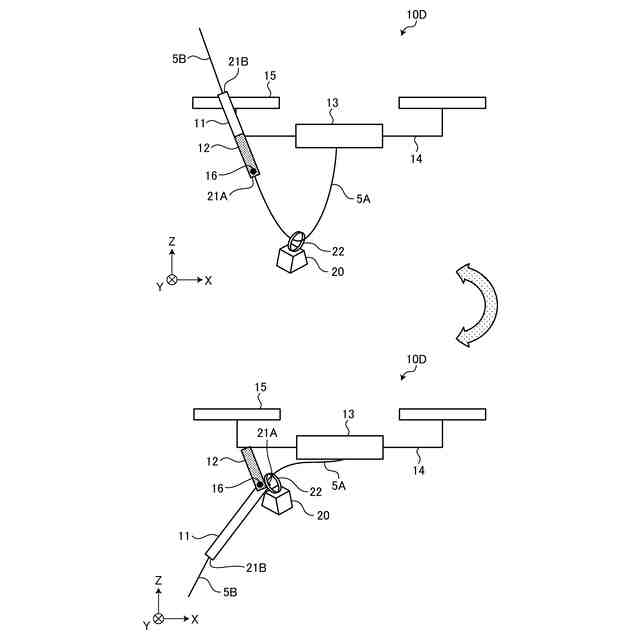
前記ケーブル係留装置の下方に位置している場合には、前記ケーブルの重さによって前記ケーブルガイドの他方の端部が水平面よりも下側を向くとともに、前記ケーブルガイドの他方の端部と前記ケーブル接続部との間のケーブルがたるむ、
ことを特徴とする請求項1に記載の無人飛行体。
【請求項3】
前記ケーブル係留装置の上方に位置している場合には、前記ケーブルの重さによって前記ケーブルガイドの一方の端部が水平面よりも下側を向くとともに、前記ケーブルガイドの一方の端部と前記ケーブル係留装置との間のケーブルがたるむ、
ことを特徴とする請求項1に記載の無人飛行体。
【請求項4】
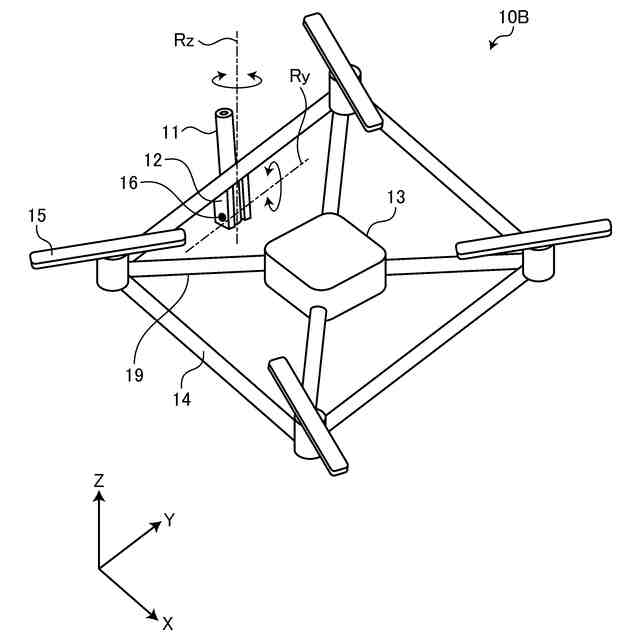
前記回動軸部は、前記第1の回動軸と、前記第1の回動軸に垂直な第2の回動軸とによって前記ケーブルガイドを回動させる、
ことを特徴とする請求項1に記載の無人飛行体。
【請求項5】
前記回動軸部は、前記第1の回動軸と、前記第2の回動軸と、前記第1の回動軸および前記第2の回動軸に垂直な第3の回動軸とによって前記ケーブルガイドを回動させる、
ことを特徴とする請求項4に記載の無人飛行体。
【請求項6】
前記ケーブルガイドの他方の端部と前記ケーブル接続部との間のケーブルに通され、前記ケーブルに沿って移動可能な摺動部が設けられた錘をさらに備える、
ことを特徴とする請求項1に記載の無人飛行体。
【請求項7】
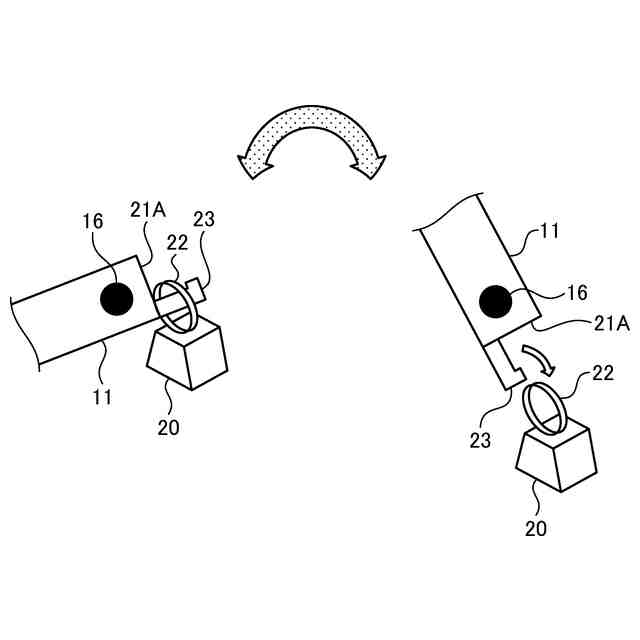
前記ケーブルガイドの他方の端部に配置されて前記摺動部を引掛ける引掛部をさらに備え、
前記引掛部は、前記ケーブルガイドの他方の端部が水平面から特定角度以上上向きになった際に前記錘を引掛けて支え、前記ケーブルガイドの他方の端部が水平面から特定角度以上下向きになった際に前記錘が外れるように構成されている、
ことを特徴とする請求項6に記載の無人飛行体。
【請求項8】
前記ケーブル接続部は、前記プロペラが配置されている平面領域の中央部に配置されている、
ことを特徴とする請求項1に記載の無人飛行体。
【請求項9】
前記ケーブル接続部は、前記プロペラが配置されている平面領域の中心部に垂直な軸を対称軸として前記回動軸部に対向する位置に配置されている、
ことを特徴とする請求項1に記載の無人飛行体。
【請求項10】
前記ケーブルを前記ケーブル接続部側から前記ケーブル係留装置側へ繰出す処理、および前記ケーブルを前記ケーブル係留装置側から前記ケーブル接続部側へ巻取る処理を実行する繰出巻取モータと、
前記繰出巻取モータを制御する制御装置と、
をさらに備え、
前記制御装置は、前記ケーブルガイドの他方の端部と前記ケーブル接続部との間のケーブルの長さが、前記ケーブル係留装置との相対位置に応じた長さとなるように前記繰出巻取モータを制御する、
ことを特徴とする請求項1に記載の無人飛行体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、無人で飛行する無人飛行体および飛行システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
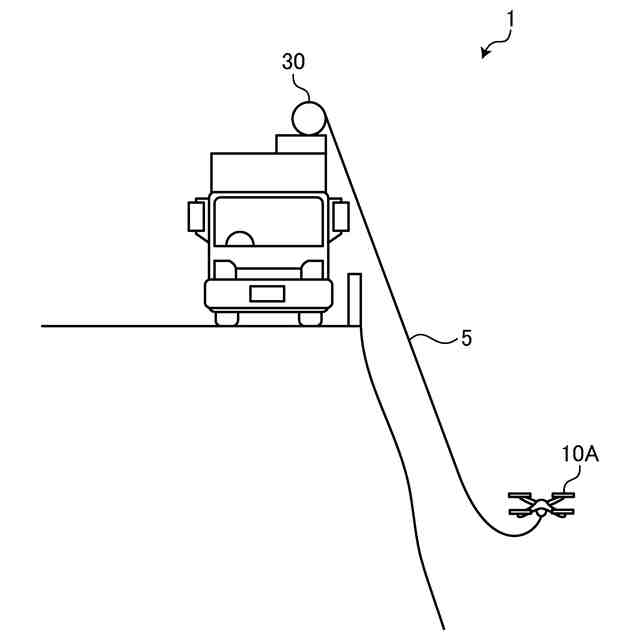
無人飛行体は、ケーブルを介してケーブル係留装置(ケーブル接続装置)に接続され、ケーブルに接続された状態で飛行する場合がある。この無人飛行体は、例えばケーブルを介して地上の電力供給装置から電力を受け付けることで長時間飛行することが可能となり、ケーブルを介して有線通信を行うことで地上局との間の通信品質を高めることができる。ケーブルに接続された無人飛行体では、ケーブルが無人飛行体のプロペラに巻き込まれる場合がある。このため、無人飛行体に対しては、ケーブルがプロペラに巻き込まれないよう飛行することが望まれる。
【0003】
特許文献1に記載の通信システムは、無人飛行体が、ケーブルを介して中継飛行体に接続され、中継飛行体がケーブルを介して通信機器に接続されている。中継飛行体の中央部分には通信用のケーブルが貫通する大きさの貫通孔が形成されており、ケーブルが貫通孔を貫通した状態になっている。貫通孔の上部には、ケーブルの外側を囲うように、ケーブルが倒れ込むことを防止する剛性カバー部が設けられており、ケーブルがたるんだ場合においてもケーブルが中継飛行体のプロペラに接触し難いように構成されている。
【先行技術文献】
【特許文献】
【0004】
特開2017-118308号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1の技術では、中継飛行体が、ケーブル係留装置よりも下方に移動すると、ケーブルが中継飛行体のプロペラに接触する場合があるという問題があった。
【0006】
本開示は、上記に鑑みてなされたものであって、無人飛行体がケーブル係留装置よりも上方および下方の何れに移動した場合であっても、ケーブルがプロペラに接触することを防止できる無人飛行体を得ることを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、本開示の無人飛行体は、ケーブルを介してケーブル係留装置に接続されるケーブル接続部と、回転力を推進力へと変換するプロペラと、ケーブル接続部およびプロペラに接続されるフレームとを備える。また、本開示の無人飛行体は、プロペラの回転面に垂直な軸方向に延設された筒状の部材によってケーブル係留装置とケーブル接続部との間でケーブルを貫通させるとともに回動するケーブルガイドと、ケーブルガイドの部材上に配置されるとともにケーブルガイドの延設方向に垂直な第1の回動軸によってケーブルガイドを回動させる回動軸部とを備える。ケーブルガイドは、ケーブル接続部から離れた位置に配置されるとともに、プロペラの可動域に含まれない面内で回動することで、ケーブルガイドの一方の端部をプロペラよりも高い位置からプロペラよりも低い位置まで移動させる。
【発明の効果】
【0008】
本開示にかかる無人飛行体は、無人飛行体が、ケーブル係留装置よりも上方および下方の何れに移動した場合であっても、ケーブルがプロペラに接触することを防止できるという効果を奏する。
【図面の簡単な説明】
【0009】
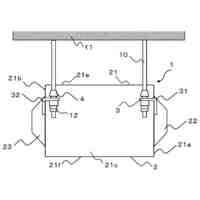
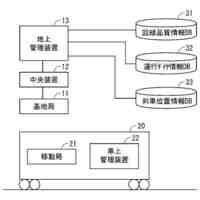
実施の形態1にかかる飛行システムの構成を示す図
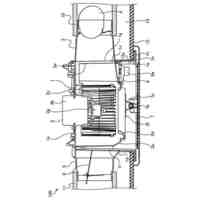
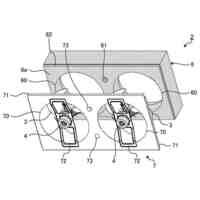
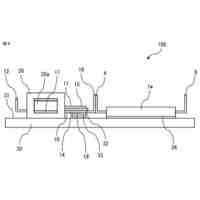
実施の形態1にかかる無人飛行体の構成を示す斜視図
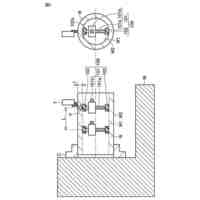
実施の形態1にかかる無人飛行体のケーブルガイドの回動方向を説明するための図
実施の形態1にかかる無人飛行体のケーブルガイドの回動位置を説明するための図
実施の形態1にかかる無人飛行体の状態の変化を説明するための図
実施の形態2にかかる無人飛行体のケーブルガイドの回動方向を説明するための図
実施の形態3にかかる無人飛行体のケーブルガイドの回動方向を説明するための図
実施の形態4にかかる無人飛行体の状態の変化を示す図
実施の形態4にかかる無人飛行体のケーブルガイドに設けられた引掛部を説明するための図
実施の形態5にかかる無人飛行体の重心を説明するための図
実施の形態1にかかる無人飛行体の重心を説明するための図
実施の形態6にかかる無人飛行体の構成を示す斜視図
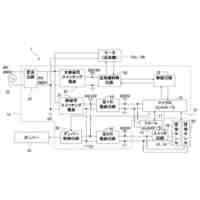
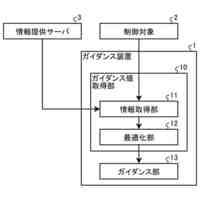
実施の形態6にかかる無人飛行体の構成を示すブロック図
実施の形態6にかかる無人飛行体によるケーブルの繰出しおよび巻取りの制御例を説明するための図
実施の形態6にかかる無人飛行体が制御する繰出しおよび巻取りの制御処理手順を示すフローチャート
実施の形態6にかかる制御装置が備える処理回路をプロセッサおよびメモリで実現する場合の処理回路の構成例を示す図
実施の形態6にかかる制御装置が備える処理回路を専用のハードウェアで構成する場合の処理回路の例を示す図
【発明を実施するための形態】
【0010】
以下に、本開示の実施の形態にかかる無人飛行体および飛行システムを図面に基づいて詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三菱電機株式会社
換気扇
12日前
三菱電機株式会社
送風装置
今日
三菱電機株式会社
換気装置
11日前
三菱電機株式会社
送風装置
今日
三菱電機株式会社
半導体装置
6日前
三菱電機株式会社
半導体装置
4日前
三菱電機株式会社
半導体装置
今日
三菱電機株式会社
半導体装置
今日
三菱電機株式会社
電動送風機
11日前
三菱電機株式会社
冷凍冷蔵庫
4日前
三菱電機株式会社
半導体装置
6日前
三菱電機株式会社
位置算出装置
12日前
三菱電機株式会社
車両制御装置
11日前
三菱電機株式会社
電力変換装置
6日前
三菱電機株式会社
電力変換装置
6日前
三菱電機株式会社
見守りシステム
12日前
三菱電機株式会社
食事支援システム
5日前
三菱電機株式会社
スクロール圧縮機
5日前
三菱電機株式会社
車両用空調システム
12日前
三菱電機株式会社
機電一体型駆動装置
今日
三菱電機株式会社
被加工物の製造方法
5日前
三菱電機株式会社
半導体装置の製造方法
11日前
三菱電機株式会社
伝送速度選択システム
11日前
三菱電機株式会社
冷却構造および電子機器
11日前
三菱電機株式会社
表示ユニット及び表示装置
6日前
三菱電機株式会社
ステータ、および、回転電機
11日前
三菱電機株式会社
半導体装置及び電力変換装置
11日前
三菱電機株式会社
ヒートシンク、及び照明器具
11日前
三菱電機株式会社
半導体装置および電力変換装置
11日前
三菱電機株式会社
空気調和装置及び衣類乾燥方法
11日前
三菱電機株式会社
鋳造用砂型の製造方法および工具
11日前
三菱電機株式会社
学習装置、推論装置、通信システム
4日前
三菱電機株式会社
半導体試験装置および半導体装置の製造方法
4日前
三菱電機株式会社
自動列車運転システムおよび自動列車運転方法
11日前
三菱電機株式会社
ガイダンス装置、ガイダンス方法およびプログラム
6日前
三菱電機株式会社
ダミーバーの製造装置およびダミーバーの製造方法
今日
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ