TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025123352
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2025098666,2021202426
出願日
2025-06-12,2021-12-14
発明の名称
連続体ロボット
出願人
キヤノン株式会社
代理人
個人
主分類
A61B
1/005 20060101AFI20250815BHJP(医学または獣医学;衛生学)
要約
【課題】耐久性を向上させ、線状部材のスムーズな移動を実現する連続体ロボットを提供する。
【解決手段】第1のピッチ円に沿って設けられた線状部材(W)を有する湾曲可能体(11)と、第1のピッチ円を外側にオフセットした第2のピッチ円に沿って設けられた出力軸(Ma)を有し、線状部材(W)を駆動して前記湾曲可能体を湾曲させるモータ(M)と、を備えた連続体ロボットであって、第1のピッチ円を外側にオフセットし、かつ第2のピッチ円を内側にオフセットした第3のピッチ円に沿って設けられた中間支持軸(21cs)と、線状部材(W)の端部の被保持部(Wa)と中間支持軸(21cs)とを接続する第1の接続部材(21cb、21ch)と、中間支持軸(21cs)と出力軸(Ma)とを接続し、出力軸(Ma)の回転を直線運動に変換して中間支持軸(21cs)を移動させる第2の接続部材(21ct)とを備える。
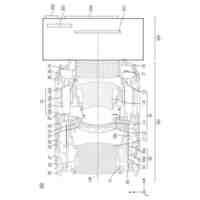
【選択図】図18
特許請求の範囲
【請求項1】
第1のピッチ円に沿って設けられた複数の線状部材を有する湾曲可能体と、前記第1のピッチ円を外側にオフセットした第2のピッチ円に沿って設けられた複数の出力軸をそれぞれ有し、前記複数の線状部材をそれぞれ駆動して前記湾曲可能体を湾曲させる複数のモータと、を備えた連続体ロボットであって、
前記第1のピッチ円を外側にオフセットし、かつ前記第2のピッチ円を内側にオフセットした第3のピッチ円に沿って設けられた複数の中間支持軸と、
前記複数の線状部材の端部と前記複数の中間支持軸とをそれぞれ接続する複数の第1の接続部材と、
前記複数の中間支持軸と前記複数の出力軸とをそれぞれ接続し、前記出力軸の回転を直線運動に変換して前記中間支持軸を直線移動させる複数の第2の接続部材と、を備えたことを特徴とする連続体ロボット。
続きを表示(約 850 文字)
【請求項2】
前記モータを支持する第1の支持部材と、
前記中間支持軸、前記第1の接続部材、および前記第2の接続部材を含む連結部を支持する第2の支持部材とを備え、
前記第1の支持部材と前記第2の支持部材とは、前記連結部の内側に配置される支持部連結部を介して連結することを特徴とする請求項1に記載の連続体ロボット。
【請求項3】
前記連結部の内側に配置される位置決め軸を備え、
前記位置決め軸が、前記支持部連結部に連結することを特徴とする請求項2に記載の連続体ロボット。
【請求項4】
前記第1の接続部材の保持部と前記線状部材の被保持部とが、固定した状態および固定が解除された状態に切り替えられて、着脱可能に構成され、
操作部の移動と連動する連動部によって、前記固定した状態と前記固定が解除された状態とに切り替えられ、
前記連動部は、前記中間支持軸、前記第1の接続部材、および前記第2の接続部材を含む連結部のうちの所定の部位の外側に配置されることを特徴とする請求項1乃至3のいずれか1項に記載の連続体ロボット。
【請求項5】
前記操作部は、前記被保持部を前記保持部から着脱する方向に向けて延びる回転軸の周りに回転可能に構成されることを特徴とする請求項4に記載の連続体ロボット。
【請求項6】
前記第1のピッチ円の径を変化させるように前記線状部材を屈曲させる第1の屈曲部および第2の屈曲部を備え、
ピッチ円の変化前後の半径の差が、前記第1の屈曲部と前記第2の屈曲部との間のピッチ円の軸方向の距離よりも小さいことを特徴とする請求項1乃至5のいずれか1項に記載の連続体ロボット。
【請求項7】
前記第1の屈曲部および前記第2の屈曲部を含むパイプ状の屈曲ガイドを備え、前記屈曲ガイドの内部を前記線状部材が移動可能となるように構成されることを特徴とする請求項6に記載の連続体ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、連続体ロボットに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
特許文献1には、駆動ワイヤを有する湾曲可能体と、アクチュエータとを備え、アクチュエータにより駆動ワイヤを後退および前進させて、湾曲可能体を操作するように構成された連続体ロボットが開示されている。
【先行技術文献】
【特許文献】
【0003】
特表2020-518353号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ピッチ円に沿って並べられる複数のワイヤを駆動して動かす連続体ロボットでは、ワイヤの駆動源として複数のモータが必要となる。
この場合に、特許文献1にあるように、モータ同士の互いの干渉を避けるため、ワイヤの端部に対し、ピッチ円の径方向の外側にオフセットした位置にモータ軸を配し、ワイヤの端部を、牽引器(本願でいうトラクタに相当)を介してモータ軸に接続する構成が考えられる。
しかしながら、当該構成において、ワイヤの端部とモータ軸との距離が大きくなると、駆動の際にトラクタに加わるモーメントが大きくなる。そのため、モータ軸とトラクタとの間の摩耗が大きくなり、耐久性に劣り、ワイヤのスムーズな移動が阻害されるおそれがある。
また、ワイヤの端部とモータ軸との距離を小さくするために、ワイヤをピッチ円の径方向の外側に屈曲させるようにガイドとすると、駆動の際にワイヤの移動を妨げる方向の摩擦力が生じる。そのため、ワイヤへの駆動力伝達のロスとなり、ワイヤのスムーズな移動が阻害されるおそれがある。
【0005】
本発明は上記のような点に鑑みてなされたものであり、耐久性を向上させ、線状部材のスムーズな移動を実現する連続体ロボットを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の連続体ロボットは、第1のピッチ円に沿って設けられた複数の線状部材を有する湾曲可能体と、前記第1のピッチ円を外側にオフセットした第2のピッチ円に沿って設けられた複数の出力軸をそれぞれ有し、前記複数の線状部材をそれぞれ駆動して前記湾曲可能体を湾曲させる複数のモータと、を備えた連続体ロボットであって、前記第1のピッチ円を外側にオフセットし、かつ前記第2のピッチ円を内側にオフセットした第3のピッチ円に沿って設けられた複数の中間支持軸と、前記複数の線状部材の端部と前記複数の中間支持軸とをそれぞれ接続する複数の第1の接続部材と、前記複数の中間支持軸と前記複数の出力軸とをそれぞれ接続し、前記出力軸の回転を直線運動に変換して前記中間支持軸を直線移動させる複数の第2の接続部材と、を備えたことを特徴とする。
【発明の効果】
【0007】
本発明によれば、耐久性を向上させ、線状部材のスムーズな移動を実現する連続体ロボットを提供することができる。
【図面の簡単な説明】
【0008】
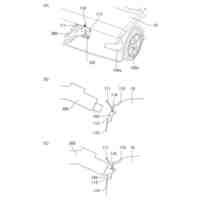
医療システムの全体図である。
医療装置および支持台を示す斜視図である。
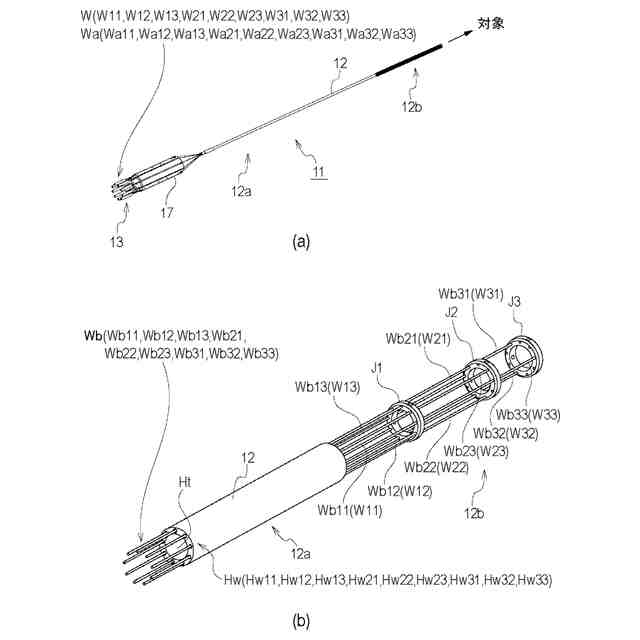
カテーテルの説明図である。
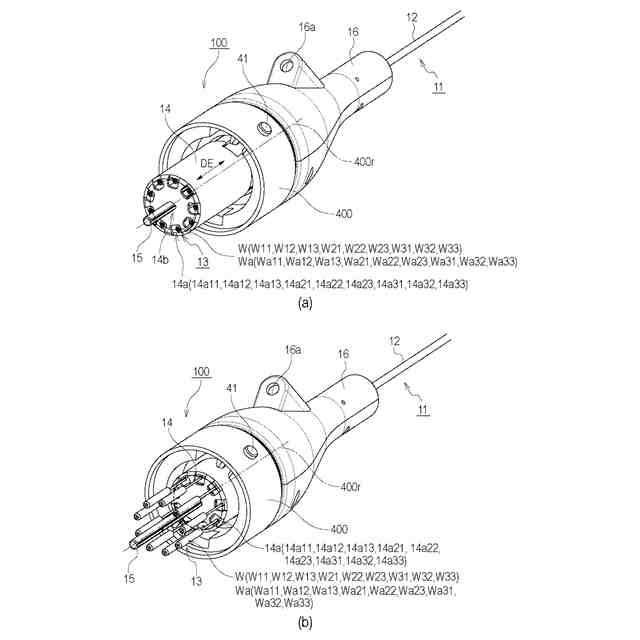
カテーテルユニットの説明図である。
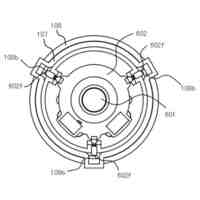
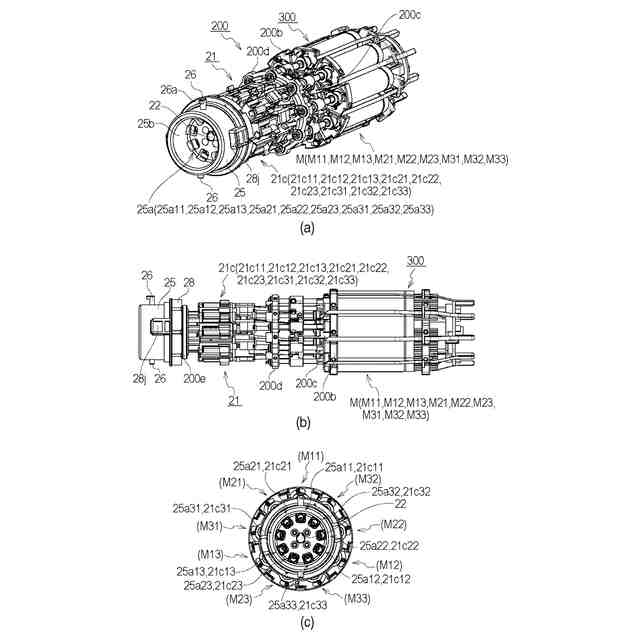
ベースユニットおよびワイヤ駆動部の説明図である。
ワイヤ駆動部、連結装置、湾曲駆動部の説明図である。
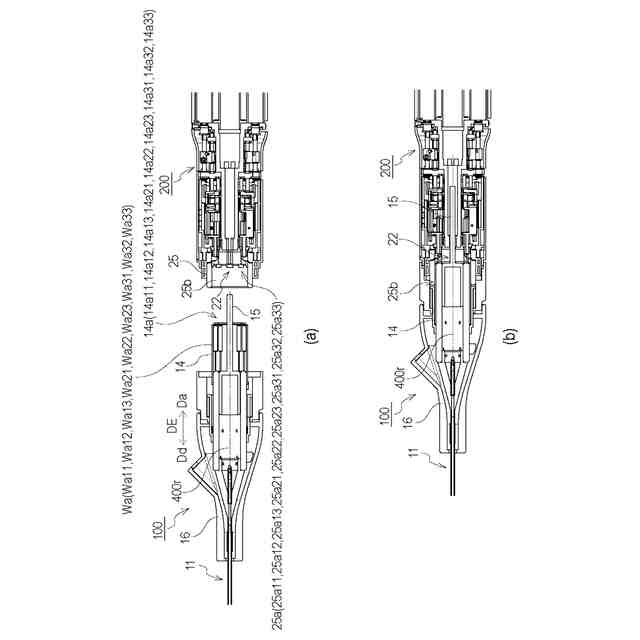
カテーテルユニットの装着の説明図である。
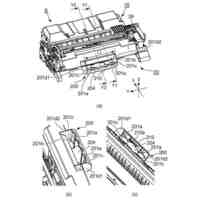
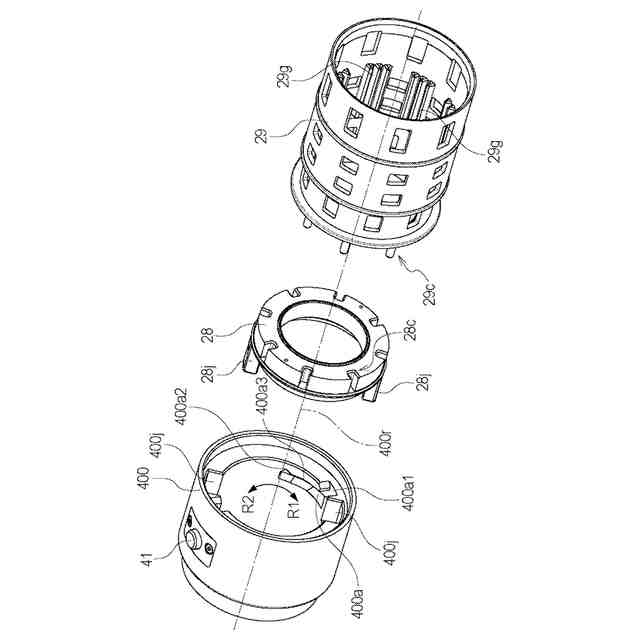
カテーテルユニットとベースユニットの連結を説明する図である。
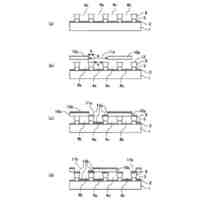
カテーテルユニットとベースユニットの連結を説明する分解図である。
連結部による駆動ワイヤの固定について説明する図である。
連結部による駆動ワイヤの固定について説明する図である。
連結部による駆動ワイヤの固定について説明する図である。
連結部による駆動ワイヤの固定について説明する図である。
連結部による駆動ワイヤの固定について説明する図である。
カテーテルユニットとベースユニットの説明図である。
操作部の動作を説明する図である。
操作部の動作を説明する断面図である。
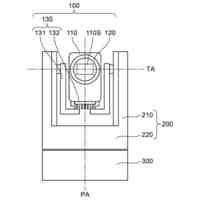
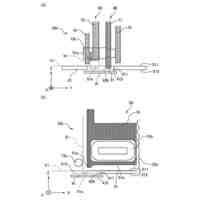
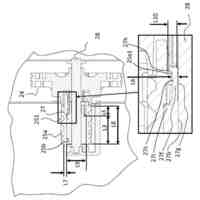
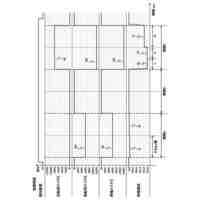
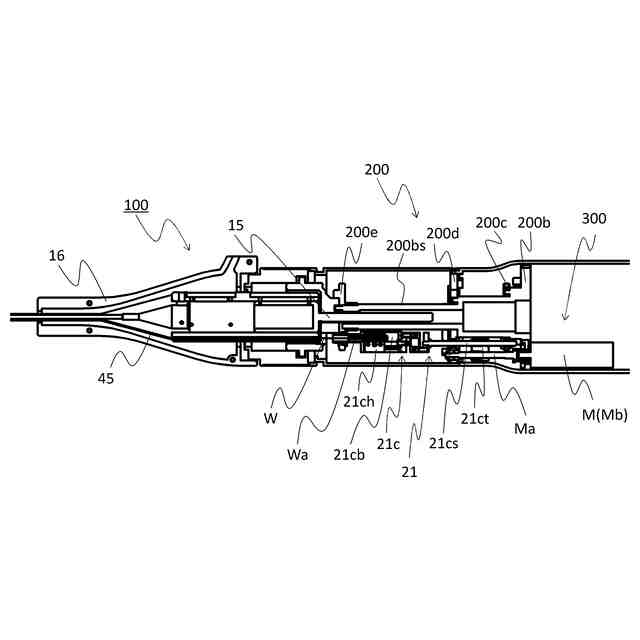
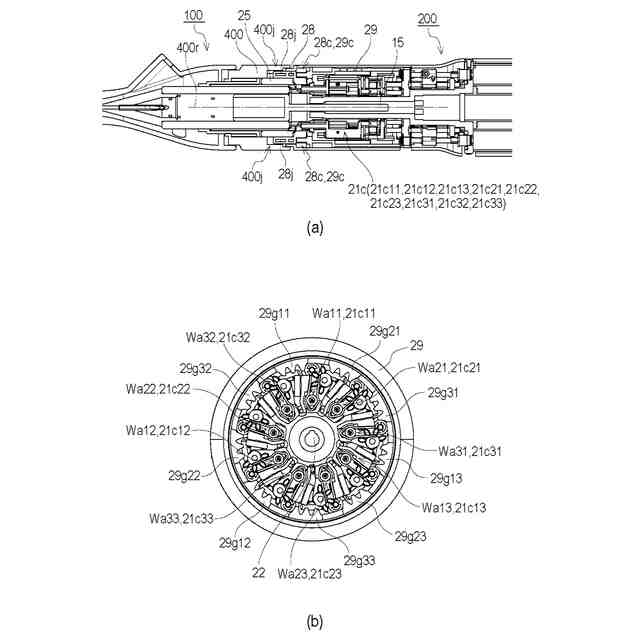
駆動力伝達機構のレイアウトを説明する断面図である。
駆動力伝達機構のレイアウトを説明する断面拡大図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して、本発明の実施例を説明する。なお、本実施例に記載されている構成部品の寸法、材質、形状、配置等は、本発明が適用される装置の構成や各種条件等により適宜変更されるべきものである。
<医療システムおよび医療装置>
図1、図2を用いて、医療システム1Aおよび医療装置(連続体ロボット)1について説明する。図1は、医療システム1Aの全体図である。図2は医療装置1および支持台2を示す斜視図である。
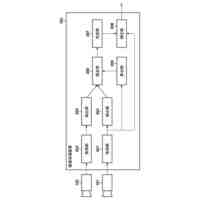
医療システム1Aは、医療装置1と、医療装置1を取り付ける支持台2と、医療装置1を制御する制御装置3を備える。本実施例において、医療システム1Aは、表示装置としてのモニタ4を備える。
【0010】
医療装置1は、湾曲可能体としてのカテーテル11を備えるカテーテルユニット(湾曲可能ユニット)100と、ベースユニット(駆動ユニット、被装着ユニット)200を備える。カテーテルユニット100は、ベースユニット200に対して着脱可能に構成されている。
本実施例において、医療システム1Aおよび医療装置1の使用者は、対象の内部にカテーテル11を挿入することにより、対象の内部の観察、対象の内部からの各種検体の採取、対象の内部に対する処置等の作業を行うことができる。一つの実施形態として、使用者は、カテーテル11を対象としての患者の内部に挿入できる。具体的には、患者の口腔もしくは鼻腔を介して気管支に挿入することにより、肺組織の観察、採取、切除等の作業を行うことができる。
カテーテル11は、上記作業を行うための医療器具をガイドするガイド(シース)として用いることができる。医療器具(ツール)の例としては、内視鏡、鉗子、アブレーション装置等が挙げられる。また、カテーテル11自身が上記の医療器具としての機能を有していてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
キヤノン株式会社
移動体
9日前
キヤノン株式会社
発光装置
3日前
キヤノン株式会社
光学機器
3日前
キヤノン株式会社
撮像装置
10日前
キヤノン株式会社
発光装置
8日前
キヤノン株式会社
電子機器
1日前
キヤノン株式会社
記録装置
10日前
キヤノン株式会社
撮像装置
1日前
キヤノン株式会社
乳酸センサ
15日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
カートリッジ
10日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
撮像システム
11日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像表示装置
9日前
キヤノン株式会社
画像形成装置
15日前
キヤノン株式会社
プログラム、方法
1日前
キヤノン株式会社
画像形成システム
2日前
キヤノン株式会社
演算装置、演算方法
3日前
キヤノン株式会社
制御装置、制御方法
1日前
キヤノン株式会社
光学装置及び撮像装置
9日前
キヤノン株式会社
光学系および撮像装置
3日前
キヤノン株式会社
光学系および撮像装置
10日前
キヤノン株式会社
光電変換装置および機器
9日前
キヤノン株式会社
保護カバー及び撮像装置
4日前
キヤノン株式会社
液体吐出装置及び吐出方法
4日前
キヤノン株式会社
レンズ装置および撮像装置
4日前
キヤノン株式会社
情報処理システム及び方法
5日前
キヤノン株式会社
定着装置及び画像形成装置
10日前
キヤノン株式会社
発光装置及びその製造方法
4日前
キヤノン株式会社
露光装置及び画像形成装置
9日前
キヤノン株式会社
光加工方法及び光加工装置
9日前
キヤノン株式会社
通信装置およびその制御方法
2日前
キヤノン株式会社
画像処理装置、画像処理方法
5日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ