TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025119937
公報種別
公開特許公報(A)
公開日
2025-08-15
出願番号
2024015073
出願日
2024-02-02
発明の名称
インパクト工具
出願人
株式会社マキタ
代理人
弁理士法人酒井国際特許事務所
主分類
B25B
21/02 20060101AFI20250807BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】異常打撃の発生を抑制すること。
【解決手段】インパクト工具は、モータと、モータにより回転されるハンマと、ハンマにより回転方向に打撃されるアンビルと、ハンマをアンビルへ向けて前方に付勢する並列に配置された2つ以上のスプリングと、モータの駆動力によってスプリングを圧縮させながらハンマを後退させ、圧縮したスプリングの弾性力によってハンマを前進させるカム機構と、ハンマを収容するハンマ収容部と、を備える。スプリングは、ハンマが前進限となる位置にある場合に所定の取付荷重でハンマを付勢する。スプリングの合成ばね定数(N/mm)を合成取付荷重(N)で割った値が0.3よりも大きい。
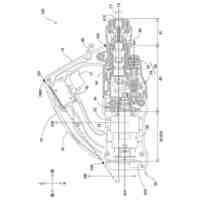
【選択図】図3
特許請求の範囲
【請求項1】
モータと、
前記モータにより回転されるハンマと、
前記ハンマにより回転方向に打撃されるアンビルと、
前記ハンマを前記アンビルへ向けて前方に付勢する並列に配置された2つ以上のスプリングと、
前記モータの駆動力によって前記スプリングを圧縮させながら前記ハンマを後退させ、圧縮した前記スプリングの弾性力によって前記ハンマを前進させるカム機構と、
前記ハンマを収容するハンマ収容部と、を備え、
前記スプリングは、前記ハンマが前進限となる位置にある場合に所定の取付荷重で前記ハンマを付勢し、
前記スプリングの合成ばね定数(N/mm)を合成取付荷重(N)で割った値が0.3よりも大きい、
インパクト工具。
続きを表示(約 1,300 文字)
【請求項2】
前記スプリングは、第1スプリングと、第2スプリングとを含み、
第1スプリングの内径は、第2スプリングの内径よりも大きく、
第1スプリングのばね定数は、第2スプリングのばね定数の2倍以上である、
請求項1に記載のインパクト工具。
【請求項3】
前記ハンマが前進限となる位置にある場合の前記スプリングの長さである取付長が、前記スプリングの自由長の90%以上である、
請求項1に記載のインパクト工具。
【請求項4】
前記カム機構によって後退する前記ハンマが離脱位置に達すると前記アンビルと非接触となり、
前記ハンマの前進限から離脱位置までの距離が、前記ハンマの前進限から後退限までの距離の50%以下である、
請求項1に記載のインパクト工具。
【請求項5】
前記スプリングは、前記ハンマの前進限から、前記ハンマの後退限の手前までの範囲で、一定のばね定数を有する、
請求項1に記載のインパクト工具。
【請求項6】
最大締付トルクが1300(N・m)以上3000(N・m)以下である、
請求項1に記載のインパクト工具。
【請求項7】
前記スプリングの前記合成取付荷重は、0(N)より大きい、
請求項1に記載のインパクト工具。
【請求項8】
モータと、
前記モータにより回転されるハンマと、
前記ハンマにより回転方向に打撃されるアンビルと、
前記ハンマを前記アンビルへ向けて前方に付勢するスプリングと、
前記モータの駆動力によって前記スプリングを圧縮させながら前記ハンマを後退させ、圧縮した前記スプリングの弾性力によって前記ハンマを前進させるカム機構と、
前記ハンマを収容するハンマ収容部と、を備え、
前記スプリングは、前記カム機構によって後退する前記ハンマが前記アンビルと非接触となる離脱位置において所定の離脱荷重で前記ハンマを付勢し、
前記スプリングのばね定数(N/mm)を前記離脱荷重(N)で割った値が0.09よりも大きい、
インパクト工具。
【請求項9】
前記スプリングは、前記ハンマに対して並列で設けられた第1スプリングと第2スプリングとを含み、
前記第1スプリング及び前記第2スプリングのばね定数の合計を、前記第1スプリング及び前記第2スプリングの前記離脱荷重の合計で割った値が0.09よりも大きい、
請求項8に記載のインパクト工具。
【請求項10】
前記スプリングは、前記ハンマに対して並列で設けられた第1スプリングと第2スプリングとを含み、
前記第1スプリングのばね定数を前記第1スプリングの前記離脱荷重で割った値が0.10よりも大きく、
前記第2スプリングのばね定数を前記第2スプリングの前記離脱荷重で割った値が0.09よりも大きい、
請求項8に記載のインパクト工具。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、インパクト工具に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
インパクト工具に係る技術分野において、特許文献1に開示されているようなインパクト工具が知られている。インパクト工具は、ハンマにより回転方向に打撃されるアンビルを備える。モータの駆動力をカム機構によってハンマの後退方向の力に変換し、スプリングを圧縮しながらハンマを後退させる。後退するハンマがアンビルを乗り越えると、スプリングの弾性エネルギーが開放され、ハンマが回転しながら前進することで、アンビルを回転方向に打撃する。
【先行技術文献】
【特許文献】
【0003】
特開2018-187700号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ハンマがアンビルを打撃した時に、締結部材(ボルトやねじなど)から、ハンマを後退させる方向の反力がハンマに作用する。締結部材のサイズによって、打撃に対する反力の大きさが変化する。反力が大きすぎると、ハンマが後退しすぎて後側の部材に衝突したりスプリングが密着長に達してハンマが急停止したりする。反力が小さすぎると、ハンマの後退量が小さくなり、ハンマが前進するときにアンビルに対して軸方向に衝突する場合がある。本明細書では、このようなハンマの後退量が過剰または不足する際に生じる打撃の状態を、本来意図された適正な打撃とは異なることから「異常打撃」と呼ぶ。異常打撃が発生すると、ハンマの移動方向へ向けた振動がインパクト工具に生じたり、ハンマの打撃力が低下したりして、インパクト工具の使用感が損なわれる。
【0005】
本明細書で開示する技術は、異常打撃の発生を抑制することを目的とする。
【課題を解決するための手段】
【0006】
本明細書は、インパクト工具を開示する。インパクト工具は、モータと、モータにより回転されるハンマと、ハンマにより回転方向に打撃されるアンビルと、ハンマをアンビルへ向けて前方に付勢する並列に配置された2つ以上のスプリングと、モータの駆動力によってスプリングを圧縮させながらハンマを後退させ、圧縮したスプリングの弾性力によってハンマを前進させるカム機構と、ハンマを収容するハンマ収容部と、を備えてもよい。スプリングは、ハンマが前進限となる位置にある場合に所定の取付荷重でハンマを付勢してもよい。スプリングの合成ばね定数(N/mm)を合成取付荷重(N)で割った値が0.3よりも大きくてもよい。
【発明の効果】
【0007】
本明細書で開示する技術によれば、異常打撃の発生を抑制することができる。
【図面の簡単な説明】
【0008】
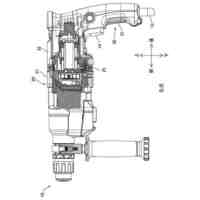
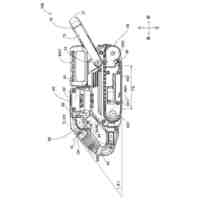
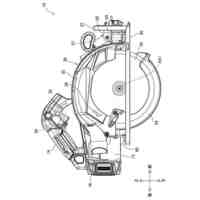
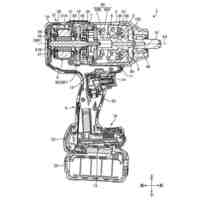
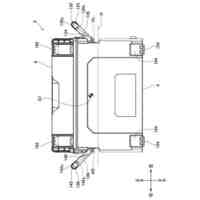
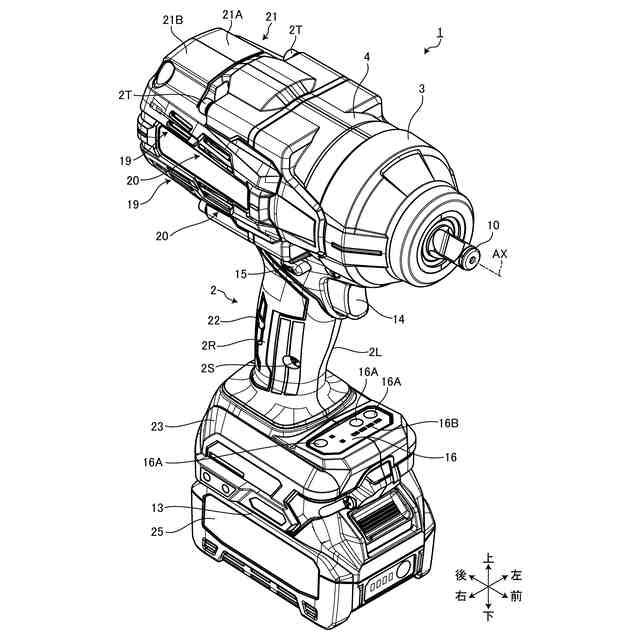
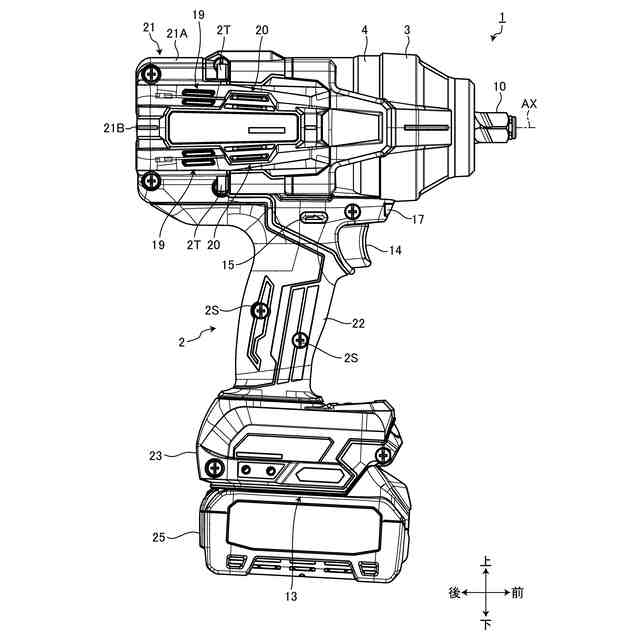
図1は、実施形態に係るインパクト工具を示す右前方からの斜視図である。
図2は、実施形態に係るインパクト工具を示す側面図である。
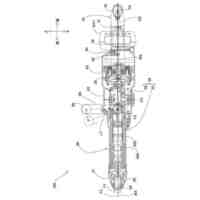
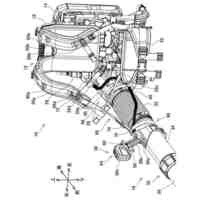
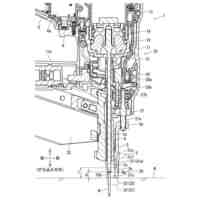
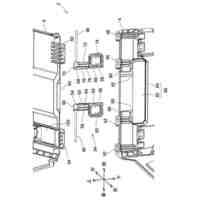
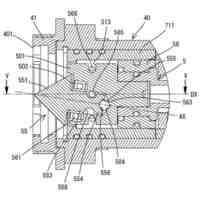
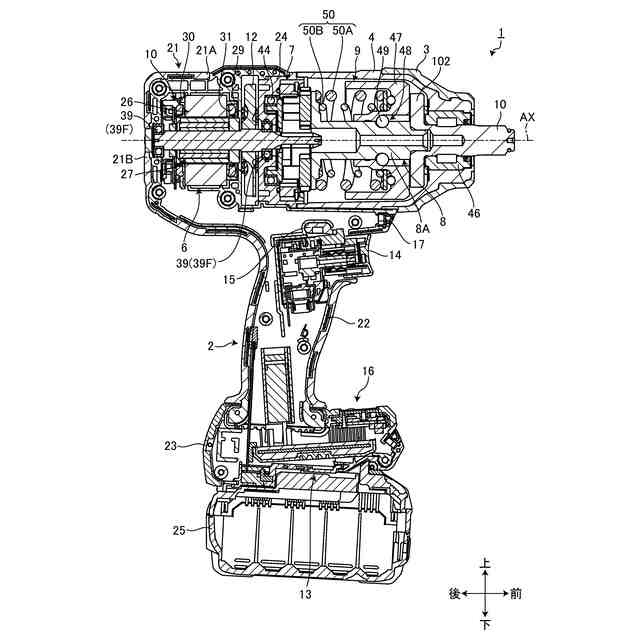
図3は、実施形態に係るインパクト工具を示す縦断面図である。
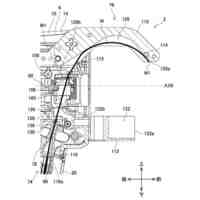
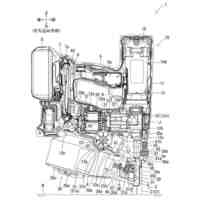
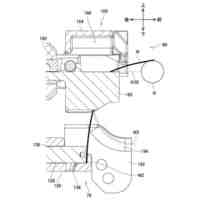
図4は、実施形態に係るインパクト工具の上部を示す縦断面図である。
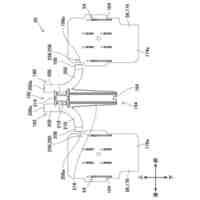
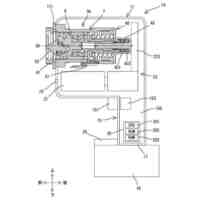
図5は、実施形態に係るインパクト工具の上部を示す横断面図である。
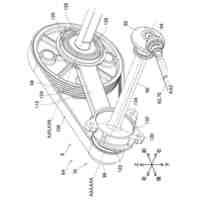
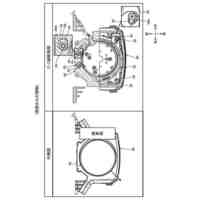
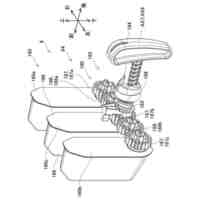
図6は、実施形態に係る打撃機構部及びアンビルを示す右前方からの斜視図である。
図7は、ハンマが離脱位置にある状態を示した横断面図である。
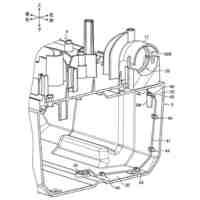
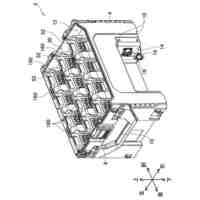
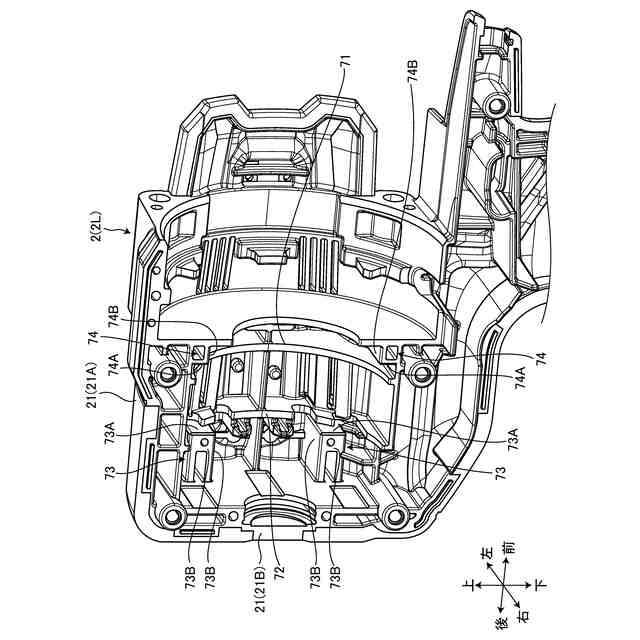
図8は、実施形態に係るハウジングの内面を示す斜視図である。
図9は、実施形態に係る後インシュレータを通る断面を後方から見た断面図である。
図10は、実施形態に係るモータを示す右後方からの斜視図である。
図11は、実施形態に係る柱部を示す縦断面図である。
図12は、実施形態に係る前インシュレータを通る断面を前方から見た断面図である。
図13は、実施形態に係るハンマの動作を説明するための説明図である。
【発明を実施するための形態】
【0009】
1つ又はそれ以上の実施形態において、インパクト工具は、モータと、モータにより回転されるハンマと、ハンマにより回転方向に打撃されるアンビルと、ハンマをアンビルへ向けて前方に付勢する並列に配置された2つ以上のスプリングと、モータの駆動力によってスプリングを圧縮させながらハンマを後退させ、圧縮したスプリングの弾性力によってハンマを前進させるカム機構と、ハンマを収容するハンマ収容部と、を備えてもよい。スプリングは、ハンマが前進限となる位置にある場合に所定の取付荷重でハンマを付勢してもよい。スプリングの合成ばね定数(N/mm)を合成取付荷重(N)で割った値が0.3よりも大きくてもよい。以下、スプリングの合成ばね定数を合成取付荷重で割った値を、「比Rm」と呼ぶ。
【0010】
取付荷重とは、ハンマが前進限となる位置にある場合のスプリングの弾性力の大きさである。なお、取付荷重とは組み立てに必要な荷重ではない。取付荷重は、スプリングがインパクト工具に取り付けられた初期状態の弾性力に相当する。取付荷重は、スプリングの自然長と取付時の長さ(取付長)との差分だけ圧縮されたときのスプリングのばね力に相当する。合成取付荷重は、ハンマが前進限となる位置にある場合の、2つ以上のスプリングの全体の弾性力の大きさである。つまり、合成取付荷重は、2つ以上のスプリングを仮想的に1つのスプリングとして考えた場合の取付荷重である。合成ばね定数は、2つ以上のスプリングを仮想的に1つのスプリングとして考えた場合のばね定数である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社マキタ
充電器
14日前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
マルノコ
2か月前
株式会社マキタ
集じん機
2か月前
株式会社マキタ
電気機器
2か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電気機器
2か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
鉄筋結束機
1か月前
株式会社マキタ
電動作業機
2か月前
株式会社マキタ
鉄筋結束機
1か月前
株式会社マキタ
打ち込み工具
2か月前
株式会社マキタ
ベルトサンダ
2か月前
株式会社マキタ
携帯用切断機
2か月前
株式会社マキタ
背負式ブロワ
2か月前
株式会社マキタ
打ち込み工具
2か月前
株式会社マキタ
レシプロソー
17日前
株式会社マキタ
インパクト工具
1か月前
株式会社マキタ
フレア形成工具
2か月前
株式会社マキタ
インパクト工具
24日前
株式会社マキタ
エアコンプレッサ
17日前
株式会社マキタ
エアコンプレッサ
17日前
株式会社マキタ
エアコンプレッサ
17日前
株式会社マキタ
エアコンプレッサ
17日前
株式会社マキタ
携帯用バンドソー
2か月前
株式会社マキタ
電動式打ち込み工具
1か月前
株式会社マキタ
電気機器およびケース
2か月前
株式会社マキタ
コネクタおよび加工機
7日前
株式会社マキタ
バイス及びレシプロソー
17日前
株式会社マキタ
電気機器および運搬ケース
2か月前
株式会社マキタ
電気機器および運搬ケース
2か月前
株式会社マキタ
鉄筋結束機および結束方法
1か月前
株式会社マキタ
作業機およびアタッチメント
1か月前
株式会社マキタ
検出装置及びロボット集塵機
20日前
株式会社マキタ
除雪機およびアタッチメント
1か月前
株式会社マキタ
フレア形成装置及びフレア形成工具
2か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ