TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025115200
公報種別
公開特許公報(A)
公開日
2025-08-06
出願番号
2024009605
出願日
2024-01-25
発明の名称
自己位置推定装置
出願人
株式会社豊田自動織機
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/246 20240101AFI20250730BHJP(制御;調整)
要約
【課題】移動体の自己位置の推定精度を向上させることができる自己位置推定装置を提供する。
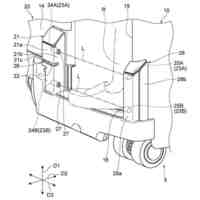
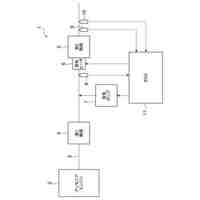
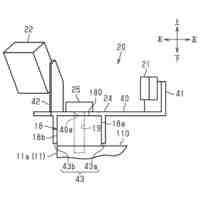
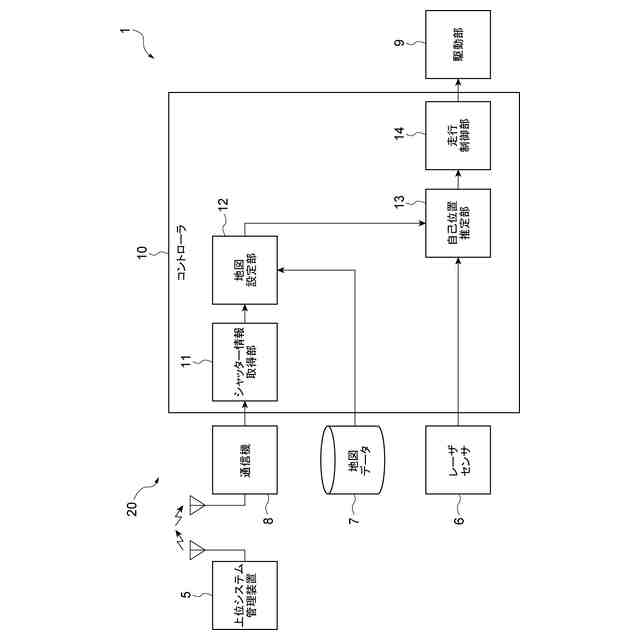
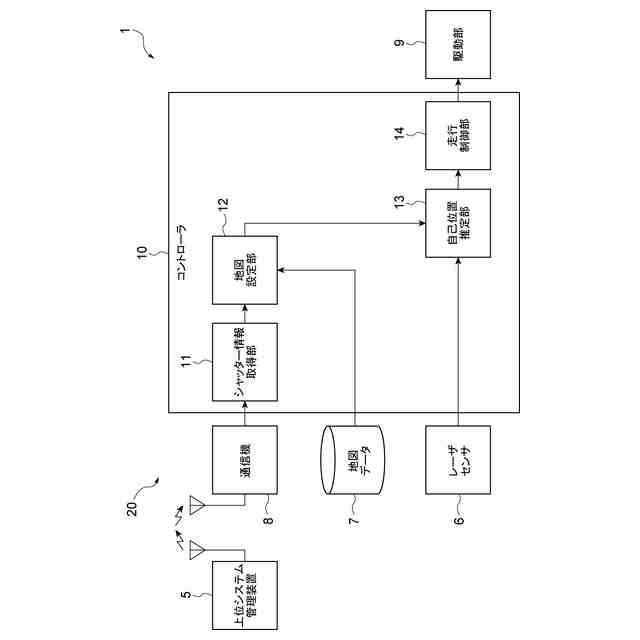
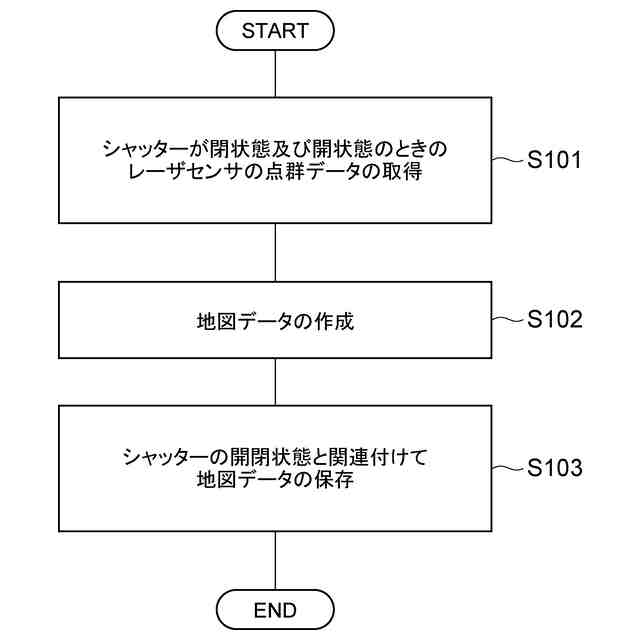
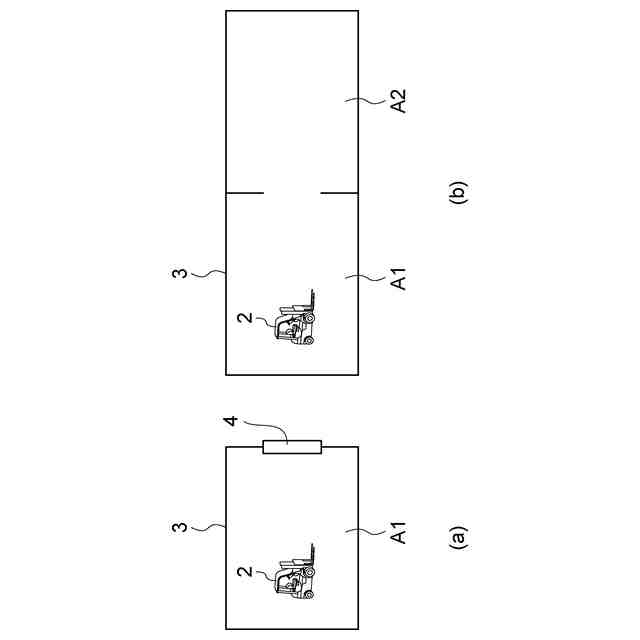
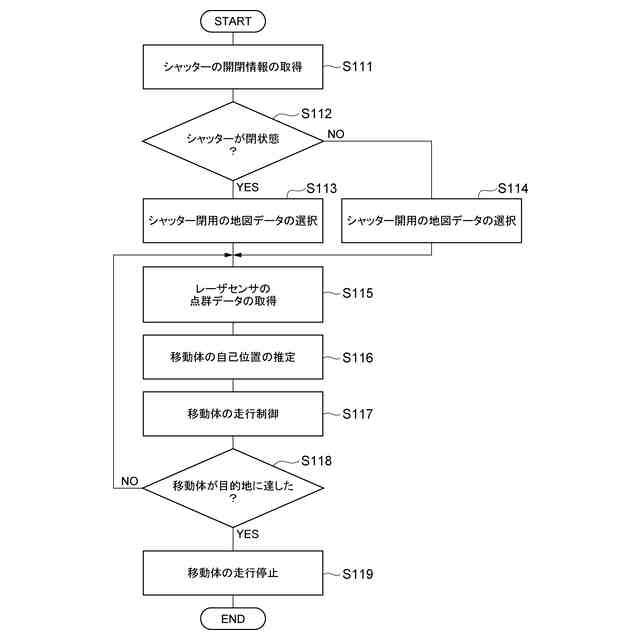
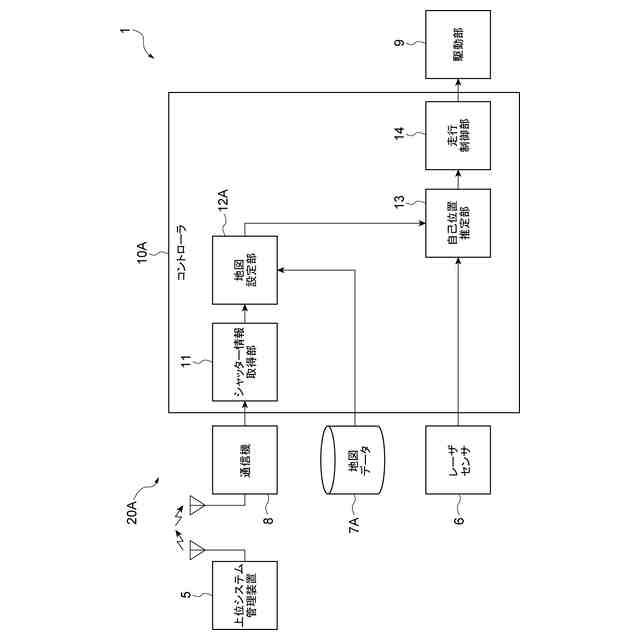
【解決手段】自己位置推定装置20は、移動体2が走行エリアを走行する際に移動体2の自己位置の推定を行う。自己位置推定装置20は、移動体2の周囲に存在する物体を検出するレーザセンサ6と、走行エリアに関する複数の地図データを記憶する地図記憶部7と、走行エリアに存在するシャッター4の状態情報を取得するシャッター情報取得部11と、シャッター4の状態情報に基づいて、地図記憶部7に記憶された複数の地図データのうち移動体2が走行する走行エリアの地図データを設定する地図設定部12と、レーザセンサ6の検出データと地図設定部12により設定された地図データとに基づいて、移動体2の自己位置を推定する自己位置推定部13とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
移動体が走行エリアを走行する際に前記移動体の自己位置の推定を行う自己位置推定装置であって、
前記移動体の周囲に存在する物体を検出する検出部と、
前記走行エリアに関する複数の地図データを記憶する地図記憶部と、
前記走行エリアに存在する可動物の状態情報を取得する情報取得部と、
前記情報取得部により取得された前記可動物の状態情報に基づいて、前記地図記憶部に記憶された前記複数の地図データのうち前記移動体が走行する走行エリアの地図データを設定する地図設定部と、
前記検出部の検出データと前記地図設定部により設定された地図データとに基づいて、前記移動体の自己位置を推定する自己位置推定部とを備える自己位置推定装置。
続きを表示(約 460 文字)
【請求項2】
前記地図記憶部は、前記可動物の状態と関連付けた複数の地図データを記憶し、
前記地図設定部は、前記情報取得部により取得された前記可動物の状態情報に基づいて、前記複数の地図データから前記移動体が走行する走行エリアの地図データを選択する請求項1記載の自己位置推定装置。
【請求項3】
前記地図記憶部は、前記走行エリア毎の複数の地図データを記憶し、
前記地図設定部は、前記情報取得部により取得された前記可動物の状態情報に基づいて、前記移動体が走行する走行エリアの地図データを組み合わせて生成する請求項1記載の自己位置推定装置。
【請求項4】
前記情報取得部は、前記可動物の状態情報を上位システムから通信により取得する請求項1記載の自己位置推定装置。
【請求項5】
前記可動物は、前記走行エリアに設置された開閉物であり、
前記情報取得部は、前記開閉物の状態情報として前記開閉物の開閉情報を取得する請求項1記載の自己位置推定装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自己位置推定装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
自己位置推定装置は、例えばレーザレンジファインダ等により移動体の周囲に存在する物体までの距離を検出し、その検出データと環境の地図データとをマッチングさせて移動体の自己位置を推定する。この場合、マッチング技術の特性上、地図データが実際の環境と異なると、自己位置の推定精度が低下する。このため、地図データを常に正しく保つ必要がある。
【0003】
例えば特許文献1には、ロボットを対象領域内で走行させ、センサによって対象領域内の環境を計測して複数の部分地図を生成し、複数の部分地図の部分地図座標を共通の1つの固定座標である全体地図座標に変換し、複数の部分地図を全体地図座標で示される全体地図座標空間へ配置することで全体地図を生成し、全体地図に基づいて複数の部分地図の記憶優先度を算出し、記憶優先度に基づいて複数の部分地図の一部を削除する技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2020-135579号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
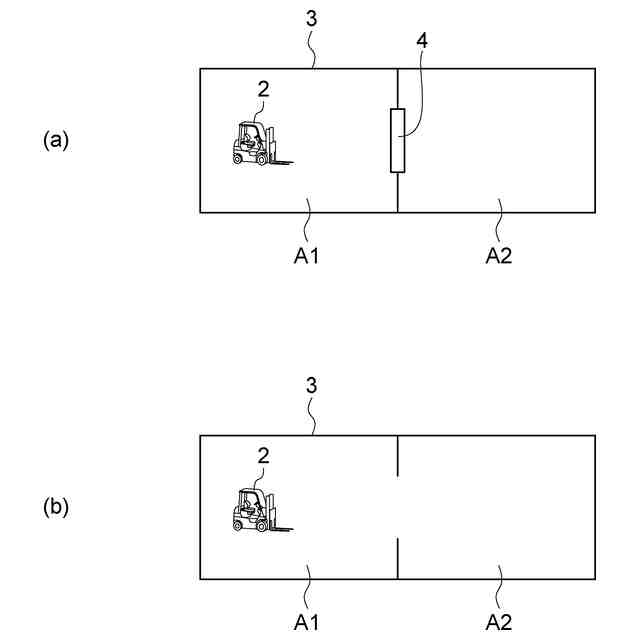
ところで、工場や倉庫等といった物流現場での運用を考えた場合、時刻と共に実際の環境が地図データに対して変化していくのではなく、特定のイベントの発生時に実際の環境が地図データに対して変化する場合がある。例えば、工場や倉庫にシャッターが設置されている場合は、シャッターの開閉状態により実際の環境が地図データに対して変化する。このため、シャッターが開いている状態のときに、シャッターが閉じている状態での地図が使用されたり、或いはシャッターが閉じている状態のときに、シャッターが開いている状態での地図が使用されると、センサの検出データと地図データとのマッチングにおいて誤マッチングが発生しやすくなる。その結果、自己位置の推定精度の低下につながる。
【0006】
本発明の目的は、移動体の自己位置の推定精度を向上させることができる自己位置推定装置を提供することである。
【課題を解決するための手段】
【0007】
(1)本発明の一態様は、移動体が走行エリアを走行する際に移動体の自己位置の推定を行う自己位置推定装置であって、移動体の周囲に存在する物体を検出する検出部と、走行エリアに関する複数の地図データを記憶する地図記憶部と、走行エリアに存在する可動物の状態情報を取得する情報取得部と、情報取得部により取得された可動物の状態情報に基づいて、地図記憶部に記憶された複数の地図データのうち移動体が走行する走行エリアの地図データを設定する地図設定部と、検出部の検出データと地図設定部により設定された地図データとに基づいて、移動体の自己位置を推定する自己位置推定部とを備える。
【0008】
このような構成では、走行エリアに存在する可動物の状態情報が取得され、可動物の状態情報に基づいて、地図記憶部に記憶された複数の地図データのうち移動体が走行する走行エリアの地図データが設定される。そして、検出部により移動体の周囲に存在する物体が検出され、検出部の検出データと設定された地図データとに基づいて、移動体の自己位置が推定される。このように可動物の状態情報に基づいて、移動体が走行する走行エリアの地図データを設定することにより、可動物の状態に応じた適切な地図データを用いて、移動体の自己位置が推定されることとなる。これにより、移動体の自己位置の推定精度が向上する。
【0009】
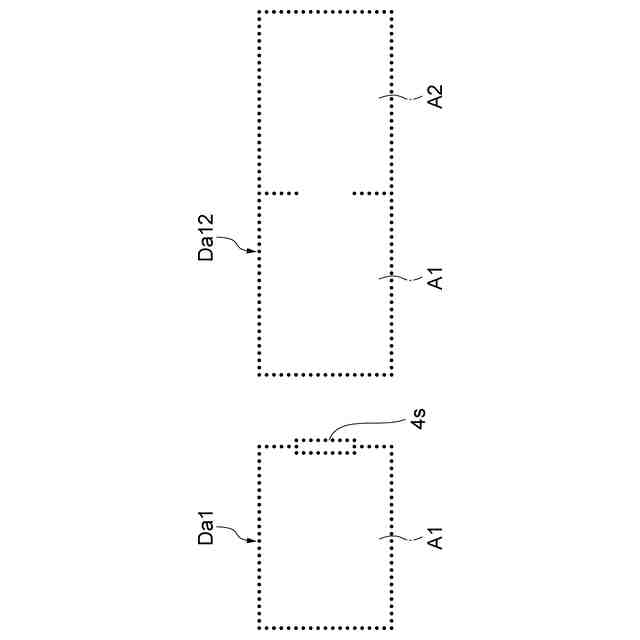
(2)上記の(1)において、地図記憶部は、可動物の状態と関連付けた複数の地図データを記憶し、地図設定部は、情報取得部により取得された可動物の状態情報に基づいて、複数の地図データから移動体が走行する走行エリアの地図データを選択してもよい。このような構成では、可動物の状態情報に基づいて、可動物の状態と関連付けた複数の地図データから移動体が走行する走行エリアの地図データを選択することにより、地図設定部の処理を簡素化することができる。
【0010】
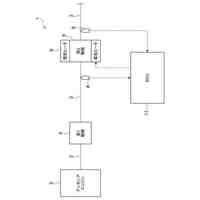
(3)上記の(1)において、地図記憶部は、走行エリア毎の複数の地図データを記憶し、地図設定部は、情報取得部により取得された可動物の状態情報に基づいて、移動体が走行する走行エリアの地図データを組み合わせて生成してもよい。このような構成では、走行エリア毎の複数の地図データを地図記憶部に記憶することにより、地図記憶部として容量が小さい安価なメモリを使用することができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社豊田自動織機
解繊機
4日前
株式会社豊田自動織機
内燃機関
19日前
株式会社豊田自動織機
トランス
1か月前
株式会社豊田自動織機
蓄電装置
19日前
株式会社豊田自動織機
産業車両
1か月前
株式会社豊田自動織機
電源装置
20日前
株式会社豊田自動織機
荷役装置
1か月前
株式会社豊田自動織機
トランス
20日前
株式会社豊田自動織機
操作装置
1か月前
株式会社豊田自動織機
産業車両
6日前
株式会社豊田自動織機
制御装置
19日前
株式会社豊田自動織機
車両用灯具
6日前
株式会社豊田自動織機
車両制御装置
1か月前
株式会社豊田自動織機
双方向充電器
1か月前
株式会社豊田自動織機
車両上部構造
6日前
株式会社豊田自動織機
排気浄化装置
1か月前
株式会社豊田自動織機
排気浄化装置
5日前
株式会社豊田自動織機
双方向充電器
1か月前
株式会社豊田自動織機
障害物検出装置
4日前
株式会社豊田自動織機
電力供給システム
1か月前
株式会社豊田自動織機
ターボチャージャ
27日前
株式会社豊田自動織機
ターボチャージャ
1か月前
株式会社豊田自動織機
燃料電池システム
13日前
株式会社豊田自動織機
燃料電池ユニット
1か月前
株式会社豊田自動織機
織機用異常検知装置
1か月前
株式会社豊田自動織機
内燃機関の制御装置
1か月前
株式会社豊田自動織機
ディーゼルエンジン
11日前
株式会社豊田自動織機
ねじりコイルばね装置
1か月前
株式会社豊田自動織機
蓄電モジュール製造方法
今日
株式会社豊田自動織機
繊維機械の検査システム
1か月前
株式会社豊田自動織機
内燃機関の制御システム
1か月前
株式会社豊田自動織機
車両のルーフサイド構造
1か月前
トヨタ自動車株式会社
蓄電池
1か月前
株式会社豊田自動織機
車両用熱マネジメントシステム
19日前
株式会社豊田自動織機
蓄電装置の製造方法及び蓄電装置
11日前
株式会社豊田自動織機
内燃機関の吸気温度制御システム
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ