TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025112988
公報種別
公開特許公報(A)
公開日
2025-08-01
出願番号
2024007588
出願日
2024-01-22
発明の名称
アクチュエータシステムの制御装置、制御方法、および、アクチュエータ制御システム
出願人
株式会社日立製作所
代理人
ポレール弁理士法人
主分類
F15B
11/16 20060101AFI20250725BHJP(流体圧アクチュエータ;水力学または空気力学一般)
要約
【課題】負荷方向によらず油圧アクチュエータの応答性を電動アクチュエータで補償可能なアクチュエータシステムの制御装置、制御方法、および、アクチュエータ制御システムを提供する。
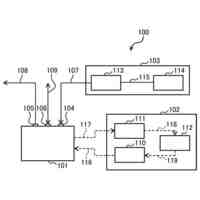
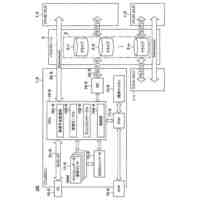
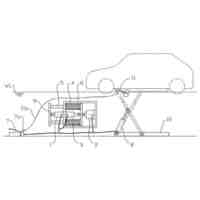
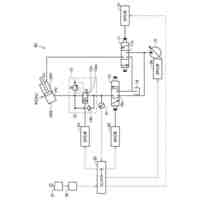
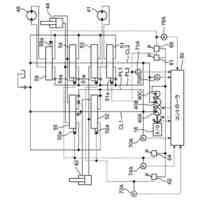
【解決手段】油圧アクチュエータ1と、電動アクチュエータ2と、比例弁6と、前記油圧アクチュエータと前記比例弁を接続する流路P1、P2と、前記油圧アクチュエータの推力と前記電動アクチュエータの推力を合計した実推力を測定する推力測定器4と、を備えるアクチュエータシステム30を制御する制御装置10であって、前記アクチュエータシステムの目標推力が入力される目標推力入力部と、前記推力測定器の出力に基づいて実推力を取得する推力取得部と、前記目標推力と前記実推力の差分を算出する差分算出部と、前記差分に基づいて、前記比例弁の開口面積及び前記電動アクチュエータの推力を制御する制御部と、を備える制御装置。
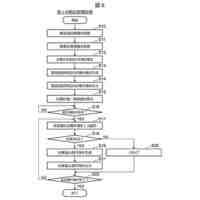
【選択図】図1
特許請求の範囲
【請求項1】
油圧アクチュエータと、
電動アクチュエータと、
比例弁と、
前記油圧アクチュエータと前記比例弁を接続する流路と、
前記油圧アクチュエータの推力と前記電動アクチュエータの推力を合計した実推力を測定する推力測定器と、
を備えるアクチュエータシステムを制御する制御装置であって、
前記アクチュエータシステムの目標推力が入力される目標推力入力部と、
前記推力測定器の出力に基づいて実推力を取得する推力取得部と、
前記目標推力と前記実推力の差分を算出する差分算出部と、
前記差分に基づいて、前記比例弁の開口面積及び前記電動アクチュエータの推力を制御する制御部と、
を備えることを特徴とする制御装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の制御装置において、
前記制御部は、前記比例弁と前記流路の接続部分の断面積を変化させることで、前記比例弁の開口面積を制御することを特徴とする制御装置。
【請求項3】
請求項1に記載の制御装置において、
前記制御部は、前記目標推力と前記実推力との差分に基づいて、任意の比率で、前記比例弁の開口面積と前記電動アクチュエータの推力を決定し、制御することを特徴とする制御装置。
【請求項4】
請求項1に記載の制御装置において、
前記油圧アクチュエータは、油圧シリンダまたは油圧回転モータであることを特徴とする制御装置。
【請求項5】
請求項1に記載の制御装置において、
前記電動アクチュエータは、電動直動モータまたは電動回転モータであることを特徴とする制御装置。
【請求項6】
請求項1に記載の制御装置において、
前記アクチュエータシステムは、前記流路に前記油圧アクチュエータのキャップ室とロッド室の油圧を測定する圧力センサを有しており、
前記制御装置は、前記圧力センサで測定した油圧と前記油圧アクチュエータの受圧面積に基づき、前記油圧アクチュエータの推力を推定することを特徴とする制御装置。
【請求項7】
請求項2に記載の制御装置において、
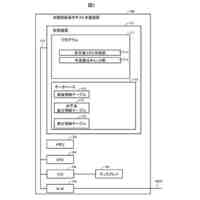
前記油圧アクチュエータの目標圧力剛性が入力される目標圧力剛性入力部と、
前記目標推力と前記目標圧力剛性に基づいて、前記油圧アクチュエータの内部の目標圧力を演算する目標圧力バランス演算器と、を備え、
前記制御部は、前記目標圧力に基づいて前記比例弁を制御することを特徴とする制御装置。
【請求項8】
油圧アクチュエータと、
電動アクチュエータと、
比例弁と、
前記油圧アクチュエータと前記比例弁を接続する流路と、
前記油圧アクチュエータの推力と前記電動アクチュエータの推力を合計した実推力を測定する推力測定器と、
を備えるアクチュエータシステムを制御する制御方法であって、
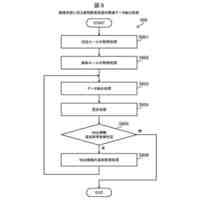
前記アクチュエータシステムの目標推力が入力される目標推力入力ステップと、
前記推力測定器の出力に基づいて実推力を取得する推力取得ステップと、
前記目標推力と前記実推力の差分を算出する差分算出ステップと、
前記差分に基づいて、前記比例弁の開口面積または前記電動アクチュエータの推力を制御する制御ステップと、
を備えることを特徴とする制御装置。
【請求項9】
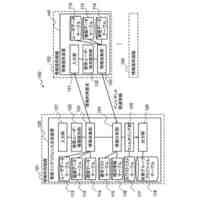
アクチュエータシステムと制御装置を有するアクチュエータ制御システムであって、
前記アクチュエータシステムは、
油圧アクチュエータと、
電動アクチュエータと、
比例弁と、
前記油圧アクチュエータと前記比例弁を接続する流路と、
前記油圧アクチュエータの推力と前記電動アクチュエータの推力を合計した実推力を測定する推力測定器と、
を備え、
前記制御装置は、
前記アクチュエータシステムの目標推力が入力される目標推力入力部と、
前記推力測定器の出力に基づいて実推力を取得する推力取得部と、
前記目標推力と前記実推力の差分を算出する差分算出部と、
前記差分に基づいて、前記比例弁の開口面積または前記電動アクチュエータの推力を制御する制御部と、
を備えることを特徴とするアクチュエータ制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動アクチュエータと油圧アクチュエータを並列に配置したアクチュエータシステムの制御装置、制御方法、および、アクチュエータ制御システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年、労働人口の低下に伴い、ロボットによる作業の自動化が進められている。ロボットが人の作業を代替する手段として、人と同等のサイズで人と同等以上の出力を備えたロボットがある。その様なロボットを実現するには、小型で高出力なアクチュエータが必要となる。小型で高出力なアクチュエータとして油圧アクチュエータがあるが、油圧アクチュエータの応答速度は数Hz程度であるため、人の作業を代替するロボットへ適用するアクチュエータとしては応答性に問題がある。
【0003】
ここで、油圧アクチュエータの応答性を改善する手段として、応答速度の速い電動アクチュエータを組み合わせる技術が考えられる。この技術に関連し、特許文献1には、油圧アクチュエータと電動アクチュエータを組み合わせた射出成型機が開示されている。
【0004】
例えば、同文献の要約書には、課題として「電動アクチュエータ使用時における高速化,安定性,応答性及び再現性を飛躍的に高めるとともに、同時に電動駆動部及び油圧駆動部の小型化及び低コスト化を実現し、加えて、射出成形機の高性能化、さらには発展性を高める。」との記載があり、その解決手段として「電動アクチュエータにより可動体を前進駆動する電動駆動部2と、油圧アクチュエータにより可動体を加圧する油圧駆動部4を備える射出成形機を駆動するに際し、電動駆動部2を制御することにより可動体を前進駆動し、かつ当該前進駆動時における負荷圧力Poを検出することにより当該負荷圧力Poに対する所定比率Kのアシスト圧力Paを算出するとともに、油圧駆動部4を制御することによりスクリュSを当該アシスト圧力Paにより加圧する。」との記載がある。
【0005】
また、同文献の段落0009には「アシスト比率Kは、制御領域毎に異ならせることができ、特に、速度制御領域における加速区間Z1又は減速区間Z2のアシスト比率Kは、80~100〔%〕,速度制御領域における定速区間Z3のアシスト比率Kは、50~80〔%〕,圧力制御領域Z4のアシスト比率Kは、60~70〔%〕にそれぞれ設定することが望ましい。」との記載がある。
【先行技術文献】
【特許文献】
【0006】
特開平11-138597号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記したように、特許文献1では、電動駆動部の負荷圧力Poに所定比率Kを乗算したアシスト圧力Paを油圧駆動部で生成することで、電動駆動部の出力を油圧駆動部の出力でアシストする射出成形機が提案されている。また、射出成型機の制御領域(動作シーケンス)に合わせて、アシスト比率Kを適宜変化させることも提案されている。
【0008】
しかしながら、電動駆動部の出力に対する油圧駆動部の出力比を一定とする特許文献1の制御では、電動駆動部の出力と同期するように油圧駆動部の出力が制御されるため、射出成型機のように、負荷の大きさが一定で、かつ、その方向も一定であるシーケンシャルな動作に適用するのであれば問題ないが、負荷の大きさが不定で負荷方向が随時変化するロボットを制御対象とする場合には、油圧駆動部の応答性不足を電動駆動部の即応性で補償できないという問題が発生する。
【0009】
本発明は上記の実状に鑑みてなされたものであり、負荷方向によらず油圧アクチュエータの応答性を電動アクチュエータで補償可能なアクチュエータシステムの制御装置、制御方法、および、アクチュエータ制御システムを提供することにある。
【課題を解決するための手段】
【0010】
上記課題を解決するために、次のような構成を採用した。油圧アクチュエータと、電動アクチュエータと、比例弁と、前記油圧アクチュエータと前記比例弁を接続する流路と、前記油圧アクチュエータの推力と前記電動アクチュエータの推力を合計した実推力を測定する推力測定器と、を備えるアクチュエータシステムを制御する制御装置であって、前記アクチュエータシステムの目標推力が入力される目標推力入力部と、前記推力測定器の出力に基づいて実推力を取得する推力取得部と、前記目標推力と前記実推力の差分を算出する差分算出部と、前記差分に基づいて、前記比例弁の開口面積及び前記電動アクチュエータの推力を制御する制御部と、を備える制御装置。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社日立製作所
部品管理装置及び方法
5日前
株式会社日立製作所
蒸発乾固装置および蒸発乾固方法
6日前
株式会社日立製作所
情報処理システム、及び情報処理方法
5日前
株式会社日立製作所
説明情報生成装置及び説明情報生成方法
6日前
株式会社日立製作所
制御装置,移動体,制御システム及び制御方法
1日前
株式会社日立製作所
ストレージシステム及びストレージシステムの制御方法
6日前
株式会社日立製作所
情報処理方法、情報処理プログラム、及び情報処理システム
5日前
株式会社日立製作所
飛行体検知装置、飛行体検知方法、及び飛行体制御システム
5日前
株式会社日立製作所
自動画面操作テスト支援装置及び自動画面操作テスト支援方法
6日前
株式会社日立製作所
データ連動システム、データ連動方法及びデータ連動プログラム
5日前
株式会社日立製作所
障害分析システム、障害分析方法、及び障害分析モデル生成方法
5日前
株式会社日立製作所
栄養塩類徐放性ブロックの製造方法および栄養塩類徐放性ブロック
6日前
株式会社日立製作所
ロボットの動作学習装置、動作学習システム、および、動作学習方法
5日前
株式会社日立製作所
脅威インテリジェンス生成装置、及び脅威インテリジェンス生成方法
6日前
株式会社日立製作所
浄水薬品注入制御システム、浄水薬品注入制御方法、及びプログラム
6日前
株式会社日立製作所
治療選択支援装置、治療選択支援方法、および治療選択支援プログラム
5日前
株式会社日立製作所
電力貯蔵装置監視システム及び電力貯蔵装置監視方法、並びに、電力貯蔵システム
6日前
株式会社日立製作所
セキュリティ侵害分析装置、セキュリティ侵害分析方法、及びセキュリティ分析システム
5日前
株式会社日立製作所
ストレージコントローラにおいて実行されるソフトウェアの起動における改ざん検証のテストを行うシステム
5日前
株式会社豊田自動織機
流体圧シリンダ
1か月前
三和テッキ株式会社
油圧アクチュエータ
6日前
個人
省エネ改良型油圧リバースブースター
1か月前
日立建機株式会社
作業機械
12日前
日立建機株式会社
作業機械
13日前
株式会社WGE
増圧装置
1日前
カヤバ株式会社
流体圧制御装置
28日前
日立建機株式会社
油圧システム
16日前
株式会社クボタ
作業機及び作業機の制御方法
7日前
日立建機株式会社
分別回収システム
16日前
日立建機株式会社
制御弁装置および作業機械
1か月前
株式会社東京精密
三位置制御装置、及び、三位置制御方法
6日前
株式会社ブリヂストン
流体圧アクチュエータ
1か月前
極東開発工業株式会社
コンクリートポンプ装置
1か月前
カヤバ株式会社
インレットブロック及びバルブ装置
26日前
株式会社小松製作所
油圧駆動システムおよび油圧駆動方法
6日前
コベルコ建機株式会社
油圧駆動装置及びこれを備えた作業機械
1か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ