TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025106830
公報種別
公開特許公報(A)
公開日
2025-07-17
出願番号
2024000402
出願日
2024-01-05
発明の名称
線路情報生成装置、線路情報生成方法およびプログラム
出願人
株式会社東芝
代理人
弁理士法人酒井国際特許事務所
主分類
B61L
25/02 20060101AFI20250710BHJP(鉄道)
要約
【課題】支障物の誤検知を抑制するとともに、人手をかけずに正確な線路情報を生成すること。
【解決手段】線路情報生成装置は、人工衛星からの測位信号に基づく路線の地点ごとの鉄道車両の位置を示す測位情報に基づいて、路線の地点ごとに左右レールの中央位置を示す第1位置情報を生成する第1生成部と、第1位置情報に基づいて、路線の地点ごとに左右レールの位置を示す第2位置情報を生成する第2生成部と、第2位置情報から、路線の地点ごとの鉄道車両の進行方向を撮像した画像情報における位置を示す第3位置情報を生成する第3生成部とを備え、現在の地点の画像情報の上部の線路領域の所定数だけ先のフレームである将来の地点の画像情報の線路領域を現在の地点の画像情報の線路領域に視点変換して線路領域を抽出し、抽出された画像情報と生成された第3位置情報とに基づいて、第3位置情報の補正を行い、補正後の位置情報を記憶装置に記憶する。
【選択図】図7
特許請求の範囲
【請求項1】
鉄道車両に搭載される線路情報生成装置であって、
一対の左右レールを前記鉄道車両が走行することにより、前記鉄道車両に設置された測位装置で受信した、人工衛星からの測位信号、に基づく路線の地点ごとの前記鉄道車両の位置を示す測位情報と、前記鉄道車両に設置された撮像装置で撮像された前記路線の地点ごとの前記鉄道車両の進行方向を撮像した画像情報と、を取得する取得部と、
前記測位情報に基づいて、前記路線の地点ごとに、前記左右レールの中央位置を示す第1位置情報を生成する第1生成部と、
前記第1位置情報に基づいて、前記路線の地点ごとに、前記左右レールの位置を示す第2位置情報を生成する第2生成部と、
前記第2位置情報から、前記画像情報における位置を示す第3位置情報を生成する第3生成部と、
前記画像情報から前記左右レールが存在する線路領域を抽出する処理部であって、前記線路領域を抽出する際に、現在の地点の画像情報の所定高さ位置から上部の前記線路領域に、前記現在の地点の画像情報から所定数だけ先のフレームである将来の地点の画像情報の前記所定高さ位置から下部の前記線路領域を前記現在の地点の画像情報の前記線路領域に視点変換して投影する抽出部と、
前記線路領域が抽出された画像情報と、生成された前記第3位置情報と、に基づいて、前記第3位置情報を補正して、補正後の前記第3位置情報を、記憶装置に記憶された、線路に関する線路情報に登録する補正部と、
を備える線路情報生成装置。
続きを表示(約 2,600 文字)
【請求項2】
前記抽出部は、前記現在の地点の画像情報の前記上部の前記線路領域の前記左右レールがカーブしている場合には、前記現在の地点の画像情報から所定数だけ先であって、前記カーブの曲率に応じた数の複数のフレームを採択して前記将来の地点の画像情報とし、前記上部の前記線路領域に、前記将来の地点の画像情報の前記下部の前記線路領域を前記現在の地点の画像情報の前記線路領域に視点変換して投影する、
請求項1に記載の線路情報生成装置。
【請求項3】
前記抽出部は、前記将来の地点の画像情報として、前記カーブの曲率が大きい程、多い数のフレームを採択する、
請求項2に記載の線路情報生成装置。
【請求項4】
前記抽出部は、前記画像情報に対して深層学習における領域分割アルゴリズムを用いて、前記画像情報から前記線路領域を抽出する、
請求項1に記載の線路情報生成装置。
【請求項5】
前記第3生成部は、
前記撮像装置の姿勢を推定する第1推定部と、
推定された前記撮像装置の姿勢と、前記撮像装置のパラメータと、に基づいて、3次元座標系の前記第2位置情報に対して座標変換を行って前記撮像装置の3次元の座標系の第4位置情報を生成し、前記第4位置情報に対して座標変換を行って2次元座標系の前記第3位置情報と、を生成する座標変換処理部と、
前記第3位置情報と前記第4位置情報とを対応付けて前記線路情報に登録する構築部と、をさらに備え、
前記補正部は、さらに、前記補正後の第3位置情報から、3次元座業系の第5位置情報を求め、前記第5位置情報を、前記線路情報に登録する、
請求項1に記載の線路情報生成装置。
【請求項6】
前記第1位置情報は、複数の点から構成される点列であり、
前記第2生成部は、前記第1位置情報の点列の複数の点のそれぞれについて、一の点から前記鉄道車両の進行方向に一つ進んだ位置の点へのベクトルを左右に90°ずつ回転させ、前記左右の幅の1/2の長さに延長した点を生成し、当該生成された複数の点からなる左右の点列を前記第2位置情報として生成し、
前記補正部は、前記補正後の第3位置情報としての左右の点列から、3次元座業系の前記左右の点列および前記左右の各点列の中央の点列とを、前記第5位置情報として求める、
請求項5に記載の線路情報生成装置。
【請求項7】
前記抽出部は、前記線路領域を抽出する際に、前記将来の地点の画像情報として、前記鉄道車両が前記進行方向と逆方向に走行しながら前記鉄道車両の後部に設けられた前記撮像装置により撮像されて画像情報の前記下部の前記線路領域を前記現在の地点の画像情報の前記線路領域に視点変換して投影する、
請求項1に記載の線路情報生成装置。
【請求項8】
鉄道車両に搭載される線路情報生成装置で実行される線路情報生成方法であって、
一対の左右レールを前記鉄道車両が走行することにより、前記鉄道車両に設置された測位装置で受信した、人工衛星からの測位信号、に基づく路線の地点ごとの前記鉄道車両の位置を示す測位情報と、前記鉄道車両に設置された撮像装置で撮像された前記路線の地点ごとの前記鉄道車両の進行方向を撮像した画像情報と、を取得するステップと、
前記測位情報に基づいて、前記路線の地点ごとに、前記左右レールの中央位置を示す第1位置情報を生成するステップと、
前記第1位置情報に基づいて、前記路線の地点ごとに、前記左右レールの位置を示す第2位置情報を生成するステップと、
前記第2位置情報から、前記画像情報における位置を示す第3位置情報を生成するステップと、
前記画像情報から前記左右レールが存在する線路領域を抽出する処理部であって、前記線路領域を抽出する際に、現在の地点の画像情報の所定高さ位置から上部の前記線路領域に、前記現在の地点の画像情報から所定数だけ先のフレームである将来の地点の画像情報の前記所定高さ位置から下部の前記線路領域を前記現在の地点の画像情報の前記線路領域に視点変換して投影するステップと、
前記線路領域が抽出された画像情報と、生成された前記第3位置情報と、に基づいて、前記第3位置情報を補正して、補正後の前記第3位置情報を、記憶装置に記憶された、線路に関する線路情報に登録するステップと、
を含む線路情報生成方法。
【請求項9】
鉄道車両に搭載される線路情報生成装置のコンピュータに実行させるためのプログラムであって、
一対の左右レールを前記鉄道車両が走行することにより、前記鉄道車両に設置された測位装置で受信した、人工衛星からの測位信号、に基づく路線の地点ごとの前記鉄道車両の位置を示す測位情報と、前記鉄道車両に設置された撮像装置で撮像された前記路線の地点ごとの前記鉄道車両の進行方向を撮像した画像情報と、を取得するステップと、
前記測位情報に基づいて、前記路線の地点ごとに、前記左右レールの中央位置を示す第1位置情報を生成するステップと、
前記第1位置情報に基づいて、前記路線の地点ごとに、前記左右レールの位置を示す第2位置情報を生成するステップと、
前記第2位置情報から、前記画像情報における位置を示す第3位置情報を生成するステップと、
前記画像情報から前記左右レールが存在する線路領域を抽出する処理部であって、前記線路領域を抽出する際に、現在の地点の画像情報の所定高さ位置から上部の前記線路領域に、前記現在の地点の画像情報から所定数だけ先のフレームである将来の地点の画像情報の前記所定高さ位置から下部の前記線路領域を前記現在の地点の画像情報の前記線路領域に視点変換して投影するステップと、
前記線路領域が抽出された画像情報と、生成された前記第3位置情報と、に基づいて、前記第3位置情報を補正して、補正後の前記第3位置情報を、記憶装置に記憶された、線路に関する線路情報に登録するステップと、
を前記コンピュータに実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、線路情報生成装置、線路情報生成方法およびプログラムに関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
近年、鉄道車両の自動運転が求められている。鉄道車両の自動運転を実現するためには、走行する鉄道の前方監視の技術が重要となり、例えば、250~350m遠方の支障物を検出することが求められる。また、レールから40cmの範囲内にある支障物を検出する必要もある。ここで、屋外環境では、天候や季節等の環境および時間帯の変動により、照度が大きく変動し、レールの見え方が変化する。また、監視距離が250~350mと広範囲にわたるため、撮像画像中のレールを常に安定して検出することは困難である。
【0003】
このため、人工衛星からの測位信号に基づいて測位する測位装置を搭載した鉄道車両を走行させて、レールの位置を検出して線路データベースに登録する。そして、鉄道車両の自動運転時には、鉄道車両の位置に応じて当該線路データベースを参照することで、常に安定して前方監視の撮像画像中のレール位置を取得することができる技術が知られている。
【先行技術文献】
【特許文献】
【0004】
特開2018-205048号公報
特開2016-598号公報
特開2020-164013号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、このような従来技術では、測位装置で測定される位置情報には、通常0.5m、最大1m程度の誤差が含まれるため、位置情報に基づくレール位置が、前方監視の撮像画像におけるレール位置に対してずれが生じてしまう。前方監視における遠方領域において、このような位置ずれが支障物の誤検出につながってしまうとともに、正確な線路情報を生成することが困難となる。
【課題を解決するための手段】
【0006】
実施形態の線路情報生成装置は、鉄道車両に搭載される線路情報生成装置であって、一対の左右レールを前記鉄道車両が走行することにより、前記鉄道車両に設置された測位装置で受信した、人工衛星からの測位信号、に基づく路線の地点ごとの前記鉄道車両の位置を示す測位情報と、前記鉄道車両に設置された撮像装置で撮像された前記路線の地点ごとの前記鉄道車両の進行方向を撮像した画像情報と、を取得する取得部と、前記測位情報に基づいて、前記路線の地点ごとに、前記左右レールの中央位置を示す第1位置情報を生成する第1生成部と、前記第1位置情報に基づいて、前記路線の地点ごとに、前記左右レールの位置を示す第2位置情報を生成する第2生成部と、前記第2位置情報から、前記画像情報における位置を示す第3位置情報を生成する第3生成部と、前記画像情報から前記左右レールが存在する線路領域を抽出する処理部であって、前記線路領域を抽出する際に、現在の地点の画像情報の所定高さ位置から上部の前記線路領域に、前記現在の地点の画像情報から所定数だけ先のフレームである将来の地点の画像情報の前記所定高さ位置から下部の前記線路領域を前記現在の地点の画像情報の前記線路領域に視点変換して投影する抽出部と、前記線路領域が抽出された画像情報と、生成された前記第3位置情報と、に基づいて、前記第3位置情報を補正して、補正後の前記第3位置情報を、記憶装置に記憶された、線路に関する線路情報に登録する補正部と、を備える。
【図面の簡単な説明】
【0007】
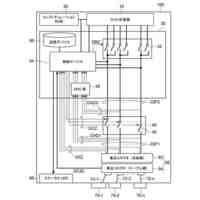
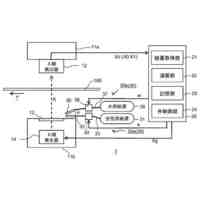
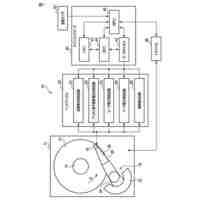
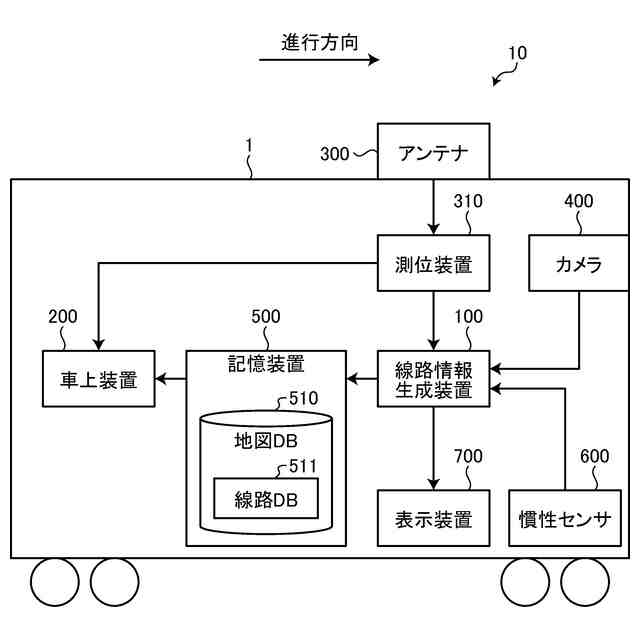
図1は、実施形態の線路情報生成システムの概要構成ブロック図である。
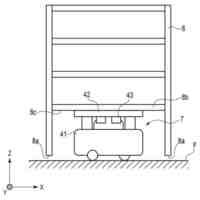
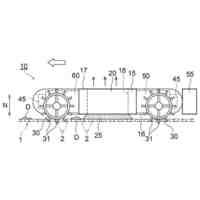
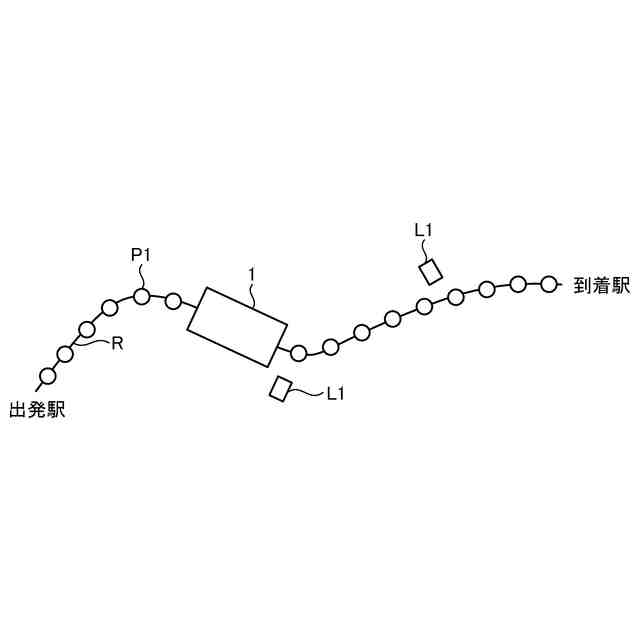
図2は、実施形態における鉄道車両が走行する路線の一例を示す模式図である。
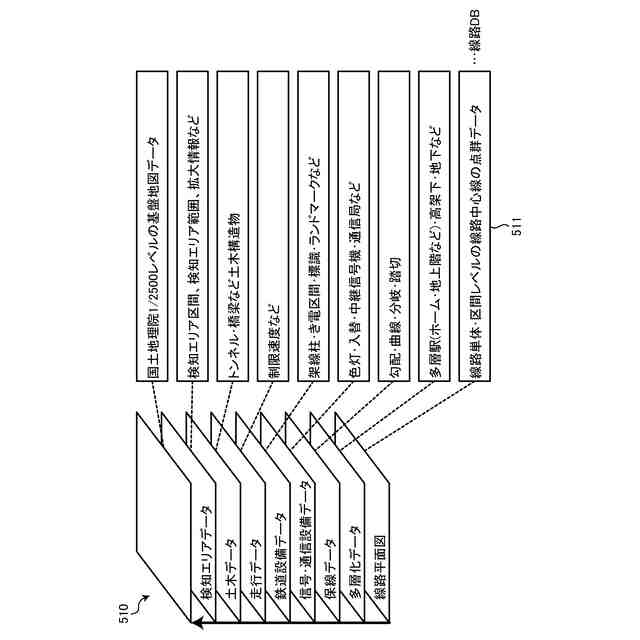
図3は、実施形態にかかる地図DBの構造の一例を示す模式図である。
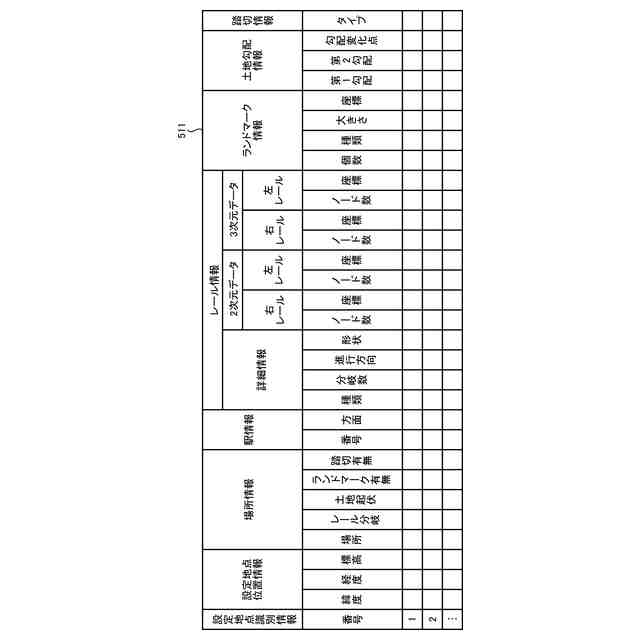
図4は、実施形態にかかる線路DBの構造の一例を示す図である。
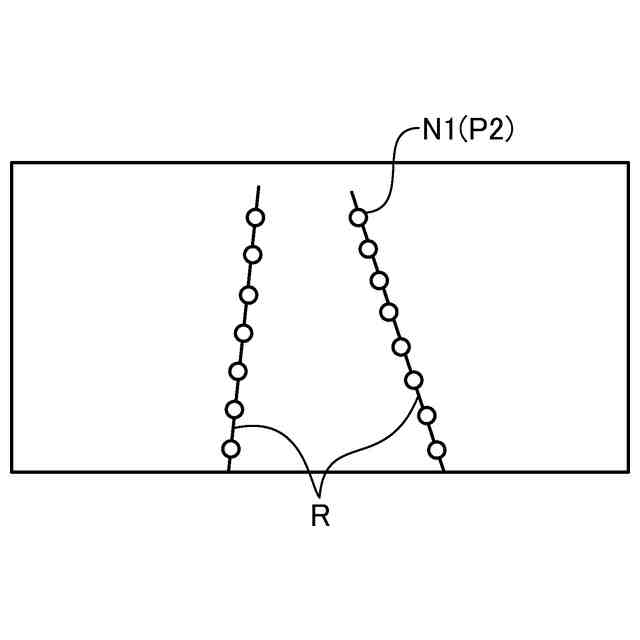
図5は、実施形態における2次元の点列データの一例を示す図である。
図6は、土地勾配情報の一例を示す図である。
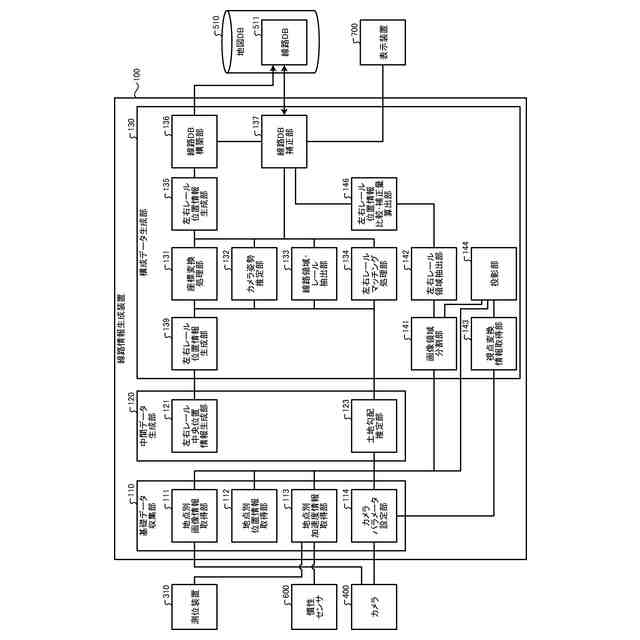
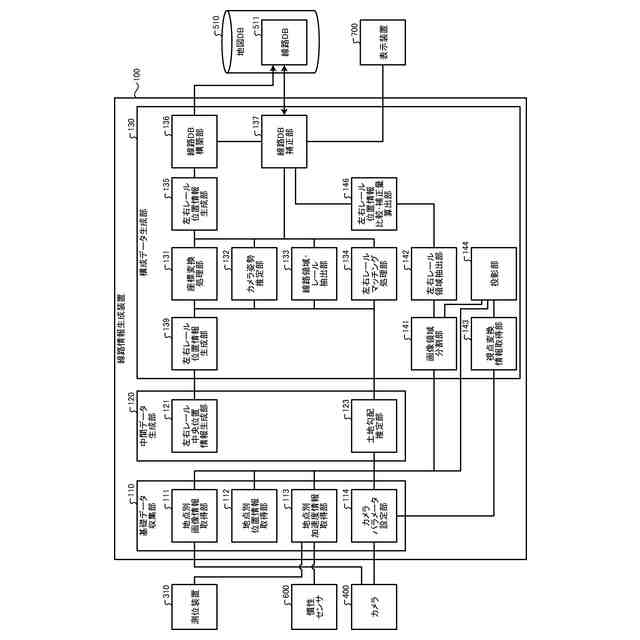
図7は、実施形態にかかる線路情報生成装置の機能ブロックの一例を示す図である。
図8は、実施形態にかかる線路情報生成処理の手順の一例を示すフローチャートである。
図9は、実施形態にかかる基礎データ収集処理の手順の一例を示すフローチャートである。
図10は、実施形態にかかる中間データ生成処理の手順の一例を示すフローチャートである。
図11は、実施形態にかかる構成データ生成処理の手順の一例を示すフローチャートである。
図12は、実施形態において、左右レール中央の位置情報から左右レールの位置情報を生成する処理を説明するための模式図である。
図13は、実施形態におけるカメラの姿勢情報の一例を示す図である。
図14は、実施形態における座標変換、補正および登録の流れの一例の流れを示す図である。
図15は、実施形態において、上り坂の勾配がある場合のカメラ座標系の3次元の左右レール位置情報から画像座標系の2次元の左右レール位置情報への透視投影による座標変換の例を示す図である。
図16は、実施形態において、下り坂の勾配がある場合のカメラ座標系の3次元の左右レール位置情報から画像座標系の2次元の左右レール位置情報への透視投影による座標変換の例を示す図である。
図17は、実施形態にかかる構成データ補正処理の手順の一例を示すフローチャートである。
図18は、実施形態にかかる遠方の左右レール位置補正情報生成処理の手順の一例を示すフローチャートである。
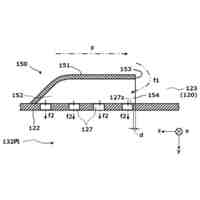
図19は、実施形態において現在の地点での画像情報における遠方の左右レールの領域に将来の地点での上記遠方の左右レールの領域を投影する例を示す図である。
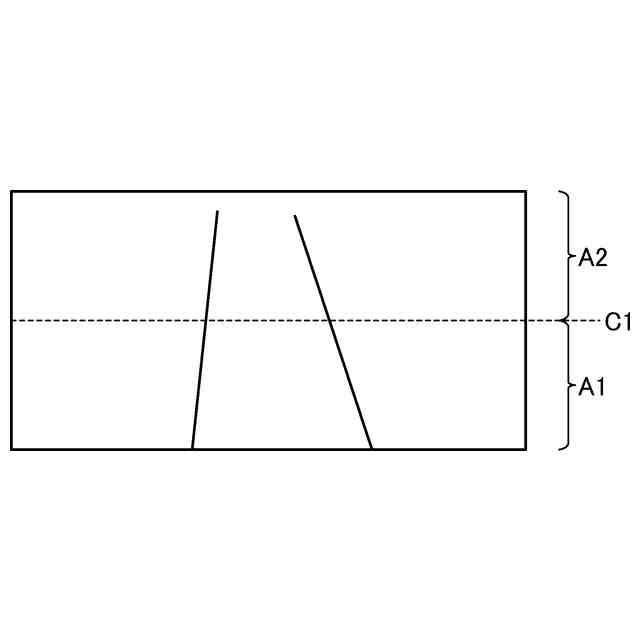
図20は、実施形態において遠方の領域の一例を説明するための図である。
図21は、実施形態において遠方でレールがカーブしている場合に、複数のフレームを採択する例を示す図である。
図22は、実施形態にかかる近傍~遠方の左右レール位置補正情報生成処理の手順の一例を示すフローチャートである。
図23は、実施形態における補正処理の流れを示す図である。
図24は、実施形態にかかる線路DBの位置情報補正・登録処理の手順の一例を示すフローチャートである。
図25は、実施形態にかかる左右レールの位置ずれ補正を行うための画面を示す図である。
図26は、実施形態にかかる3次元データである地点別位置情報の補正の例を示す図である。
【発明を実施するための形態】
【0008】
以下、添付図面を参照しながら、実施形態に係る線路情報生成装置、線路情報生成方法およびプログラムを詳細に説明する。
【0009】
(実施形態)
図1は、実施形態の線路情報生成システムの概要構成ブロック図である。
本実施形態にかかる線路情報生成システム10は、鉄道車両1に搭載され、アンテナ300と、測位装置310と、カメラ400と、線路情報生成装置100と、慣性センサ600と、表示装置700と、記憶装置500と、車上装置200と、を主に備えている。ここで、鉄道車両を車両と称する場合がある。また、本実施形態では、車両は1両編成としているが、これに限定されるものではなく、2両以上の編成でもよい。表示装置700は、出力装置の一例である。
【0010】
アンテナ300は、鉄道車両1の幅方向の中央付近に設置され、測位用の人工衛星から送信された電波信号を受信する。電波信号は、鉄道車両1の位置を計測するための情報を含む信号である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社東芝
センサ
26日前
株式会社東芝
固定子
9日前
株式会社東芝
センサ
2日前
株式会社東芝
遮断装置
2か月前
株式会社東芝
回路素子
25日前
株式会社東芝
配線治具
1か月前
株式会社東芝
搬送装置
2か月前
株式会社東芝
燃料電池
1か月前
株式会社東芝
電子機器
2か月前
株式会社東芝
回転電機
2か月前
株式会社東芝
ドア構造
12日前
株式会社東芝
判定装置
2か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
X線厚み計
1か月前
株式会社東芝
ラック装置
5日前
株式会社東芝
主幹制御器
1か月前
株式会社東芝
電動送風機
3日前
株式会社東芝
半導体装置
2か月前
株式会社東芝
電磁流量計
1か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
計測システム
18日前
株式会社東芝
ディスク装置
16日前
株式会社東芝
アンテナ装置
1か月前
株式会社東芝
異常検出装置
17日前
株式会社東芝
開発支援装置
13日前
株式会社東芝
差動伝送回路
5日前
株式会社東芝
ディスク装置
19日前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
アイソレータ
4日前
株式会社東芝
電力変換装置
23日前
株式会社東芝
ディスク装置
4日前
株式会社東芝
アンテナ装置
1か月前
株式会社東芝
ディスク装置
3日前
株式会社東芝
水中洗浄装置
1か月前
株式会社東芝
操作盤カバー
1か月前
株式会社東芝
アイソレータ
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ