TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025094661
公報種別
公開特許公報(A)
公開日
2025-06-25
出願番号
2023210353
出願日
2023-12-13
発明の名称
作業機械の作業分析システム及び作業機械の作業分析方法
出願人
鹿島建設株式会社
代理人
弁理士法人後藤特許事務所
主分類
E02F
9/20 20060101AFI20250618BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械により行われた作業内容を把握する。
【解決手段】作業分析システム100は、作業機械1を操作するための操作レバーLA,LBの操作方向を検知可能な操作検知部11,12,14と、作業機械1により行われる作業内容に応じた操作レバーLA,LBの標準操作パターンが記憶されたパターン記憶部22と、操作検知部11,12,14で検知された操作方向から求められた操作レバーLA,LBの実測操作パターンを、パターン記憶部22に記憶された標準操作パターンと比較し、作業機械1によって行われた作業内容を判定する作業判定部23と、を備える。
【選択図】図6
特許請求の範囲
【請求項1】
作業機械により行われた作業内容を分析する作業機械の作業分析システムであって、
前記作業機械を操作するための操作レバーの操作方向を検知可能な操作検知部と、
前記作業機械により行われる作業内容に応じた前記操作レバーの標準操作パターンが記憶されたパターン記憶部と、
前記操作検知部で検知された前記操作方向から求められた前記操作レバーの実測操作パターンを、前記パターン記憶部に記憶された前記標準操作パターンと比較し、前記作業機械によって行われた前記作業内容を判定する作業判定部と、を備える、
作業機械の作業分析システム。
続きを表示(約 790 文字)
【請求項2】
前記作業判定部は、所定の作業時間内に前記作業機械によって行われた前記作業内容を判定し、前記作業内容毎に前記作業時間内に実行された頻度を求める、
請求項1に記載の作業機械の作業分析システム。
【請求項3】
前記作業機械の作業状況を撮像する撮像部と、
前記標準操作パターンを追加するパターン追加部と、をさらに備え、
前記パターン追加部は、前記撮像部により撮像された画像データから判定された前記作業内容が前記作業機械によって実施される際の前記実測操作パターンを、前記作業内容に対応する前記標準操作パターンとして追加する、
請求項1または2に記載の作業機械の作業分析システム。
【請求項4】
前記操作検知部は、
前記操作レバーの傾きを検出する操作レバー傾斜検出器と、
前記作業機械の傾きを検出する作業機械傾斜検出器と、を有し、
前記操作方向は、前記操作レバー傾斜検出器の検出値と前記作業機械傾斜検出器の検出値との差分から求められる、
請求項1または2に記載の作業機械の作業分析システム。
【請求項5】
作業機械により行われた作業内容を分析する作業機械の作業分析方法であって、
前記作業機械を操作するための操作レバーの操作方向を検知可能な操作検知部で検知された前記操作方向を取得する操作方向取得工程と、
前記作業機械により行われる作業内容に応じた前記操作レバーの標準操作パターンが記憶されたパターン記憶部に記憶された前記標準操作パターンと、前記操作検知部で検知された前記操作方向から求められた前記操作レバーの実測操作パターンとを比較し、前記作業機械によって行われた前記作業内容を判定する作業内容判定工程と、を含む、
作業機械の作業分析方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械の作業分析システム及び作業機械の作業分析方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、作業機械の作業の開始及び終了を自動的に判定する作業機械の工程管理システムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2003-138874号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の発明では、作業機械が作業時に発生する音を計測したり、作業機械の電動モータや油圧機器にセンサを設けたりすることによって、作業機械による作業の開始及び終了を判定することを可能としているものの、当該作業機械により具体的にどのような作業が行われているかを特定することはできていない。このため、作業機械が稼働した作業時間内においてどのような作業がどのような頻度で実施されたのかを把握することができないことから、例えば、作業機械を操作するオペレータに対して作業手順の改善等を指導することができず、結果として、作業機械による作業の効率を向上させることができないおそれがある。
【0005】
本発明は、作業機械により行われた作業内容を把握可能とすることを目的とする。
【課題を解決するための手段】
【0006】
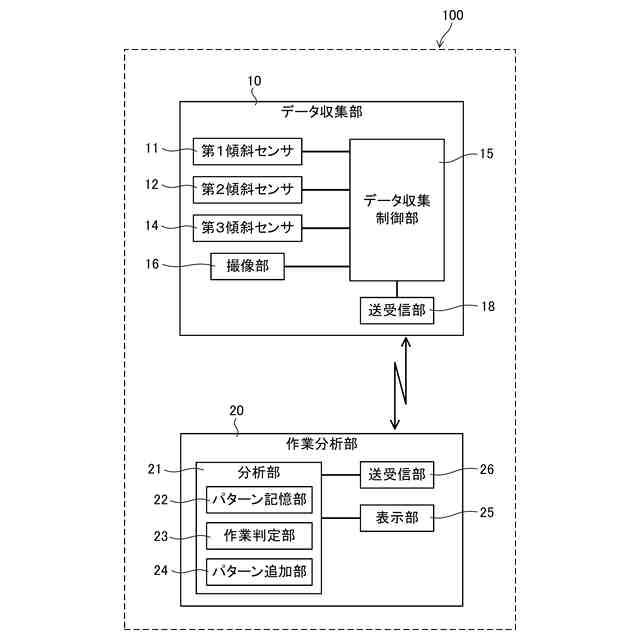
本発明は、作業機械により行われた作業内容を分析する作業機械の作業分析システムであって、作業機械を操作するための操作レバーの操作方向を検知可能な操作検知部と、作業機械により行われる作業内容に応じた操作レバーの標準操作パターンが記憶されたパターン記憶部と、操作検知部で検知された操作方向から求められた操作レバーの実測操作パターンを、パターン記憶部に記憶された標準操作パターンと比較し、作業機械によって行われた作業内容を判定する作業判定部と、を備える。
【0007】
また、本発明は、作業機械により行われた作業内容を分析する作業機械の作業分析方法であって、作業機械を操作するための操作レバーの操作方向を検知可能な操作検知部で検知された操作方向を取得する操作方向取得工程と、作業機械により行われる作業内容に応じた操作レバーの標準操作パターンが記憶されたパターン記憶部に記憶された標準操作パターンと、操作検知部で検知された操作方向から求められた操作レバーの実測操作パターンとを比較し、作業機械によって行われた作業内容を判定する作業内容判定工程と、を含む。
【発明の効果】
【0008】
本発明によれば、作業機械により行われた作業内容を把握することができる。
【図面の簡単な説明】
【0009】
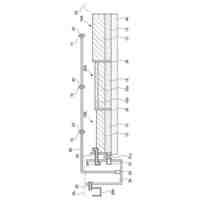
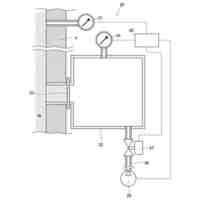
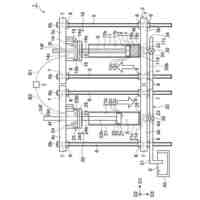
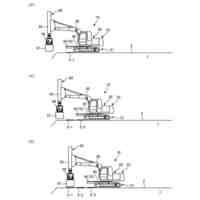
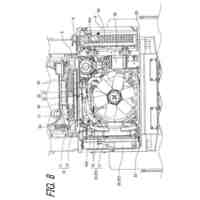
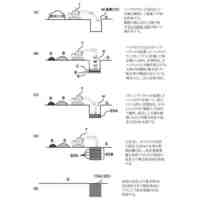
本発明の実施形態に係る作業機械の作業分析システムにより作業内容が分析される作業機械の例を示す概略図である。
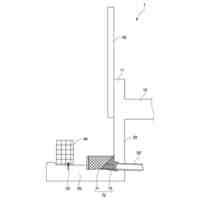
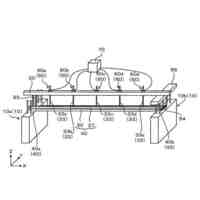
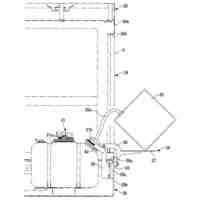
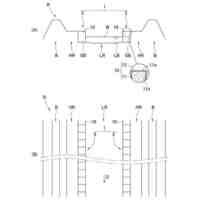
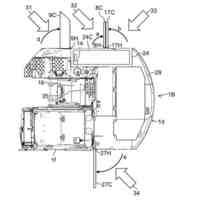
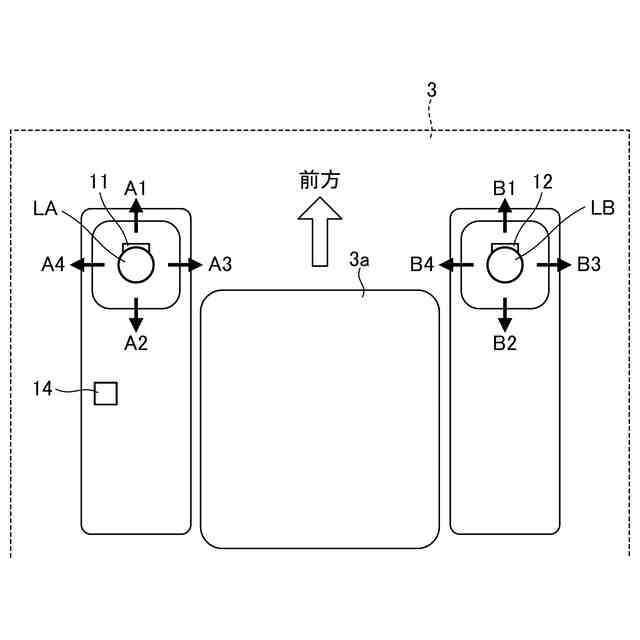
操作レバーが配置された作業機械の運転席の例を示す概略図である。
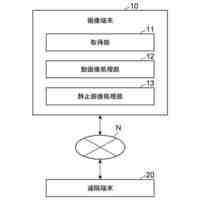
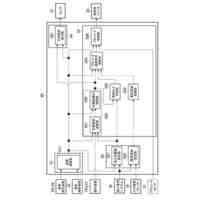
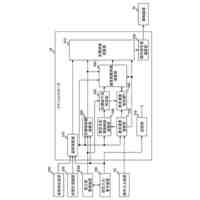
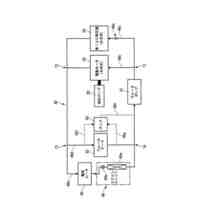
本発明の実施形態に係る作業機械の作業分析システムのブロック図である。
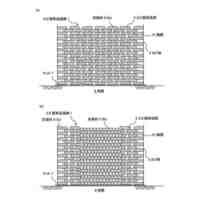
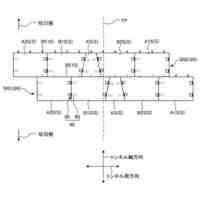
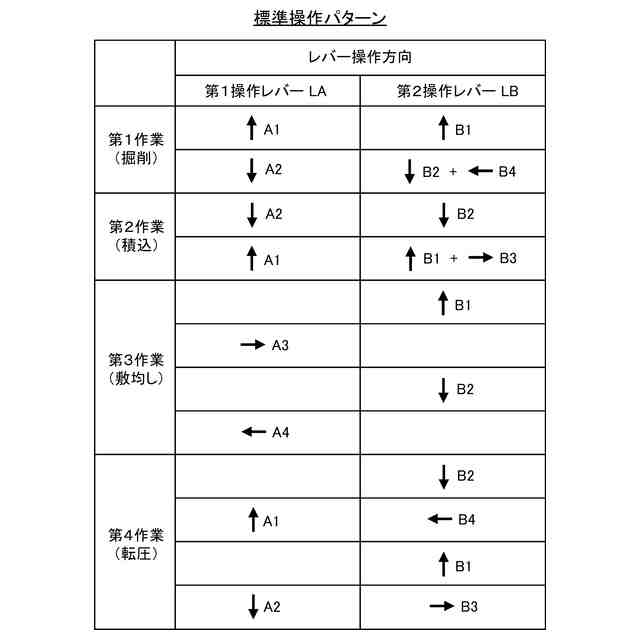
作業機械の作業内容に対応する操作レバーの操作パターンの例を示す図である。
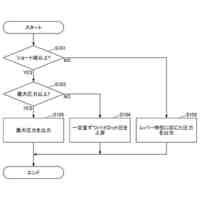
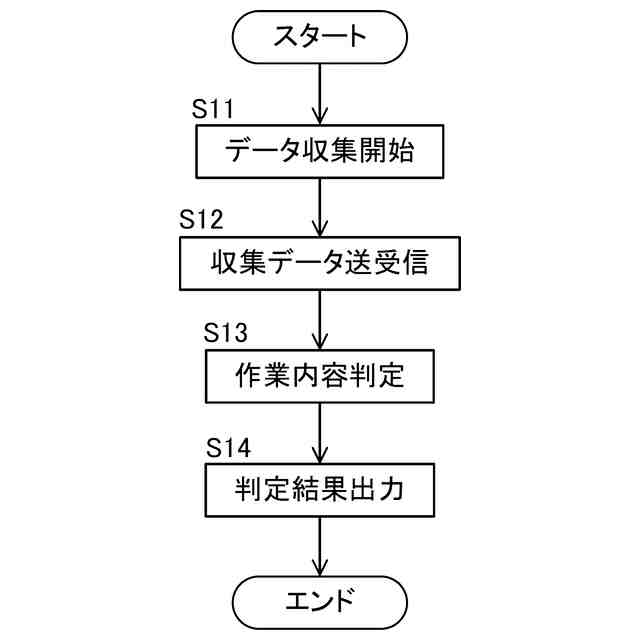
本発明の実施形態に係る作業機械の作業分析方法による作業内容の分析手順を示したフローチャートである。
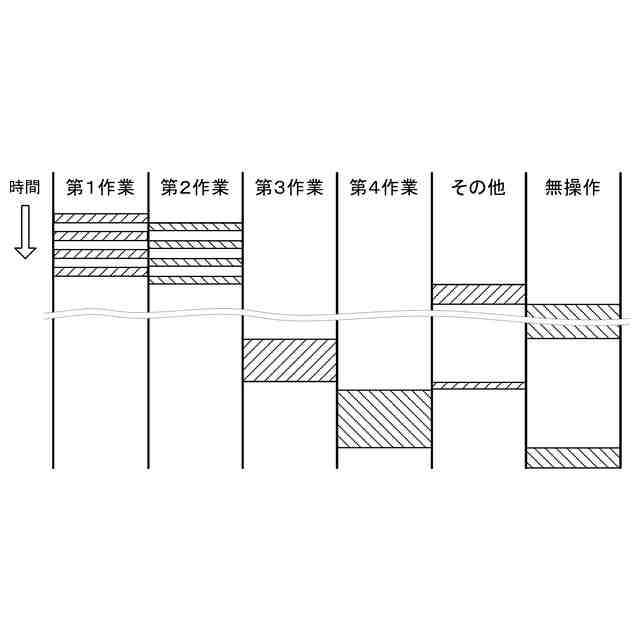
作業内容の判定について説明するための図である。
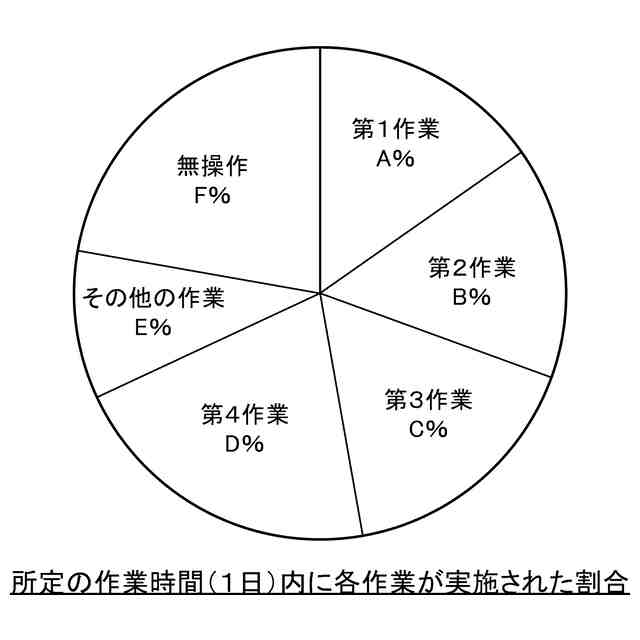
本発明の実施形態に係る作業機械の作業分析システムによって判定された作業機械の作業内容をグラフ化した例を示す図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して、本発明の実施形態に係る作業機械の作業分析システム及び作業機械の作業分析方法について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
鹿島建設株式会社
端末
10日前
鹿島建設株式会社
定着構造
1日前
鹿島建設株式会社
基礎構造
1か月前
鹿島建設株式会社
接合構造
7日前
鹿島建設株式会社
解体方法
1か月前
鹿島建設株式会社
RFIDタグ
22日前
鹿島建設株式会社
レインガーデン
10日前
鹿島建設株式会社
土壌の浄化方法
2日前
鹿島建設株式会社
エビ類育成漁礁
1か月前
鹿島建設株式会社
壁体の構築方法
今日
鹿島建設株式会社
形状検出システム
今日
鹿島建設株式会社
水素貯蔵システム
1か月前
鹿島建設株式会社
計測装置及び計測方法
7日前
鹿島建設株式会社
接合構造および接合方法
1か月前
鹿島建設株式会社
植栽設置部付きベランダ構造
7日前
鹿島建設株式会社
液状化対策構造および液状化対策方法
13日前
鹿島建設株式会社
帯水層蓄熱システム及び帯水層蓄熱方法
6日前
鹿島建設株式会社
土質材料試験装置および土質材料試験方法
14日前
ジオスター株式会社
長尺部材の吊り下げ方法
10日前
鹿島建設株式会社
トンネルの覆工構造、及び、トンネルの覆工体の構築方法
20日前
鹿島建設株式会社
作業機械の作業分析システム及び作業機械の作業分析方法
1か月前
鹿島建設株式会社
レアアース抽出方法、レアアース抽出システム及びレアアース製造方法
7日前
鹿島建設株式会社
コンクリート床版、コンクリート床版の製造方法、およびコンクリート床版の接合方法
今日
鹿島建設株式会社
目地板を施工対象物の上面上に供給する方法及び装置
15日前
個人
簡易免震構造
20日前
日立建機株式会社
作業機械
今日
住友建機株式会社
ショベル
1か月前
日本車輌製造株式会社
建設機械
1か月前
日立建機株式会社
建設機械
1日前
株式会社久保製作所
河川構造物
21日前
株式会社クボタ
作業車両
16日前
日立建機株式会社
作業機械
15日前
株式会社本久
改良地盤構築方法
7日前
株式会社クボタ
作業機
6日前
日本車輌製造株式会社
建設機械
13日前
日立建機株式会社
電動式建設機械
21日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ