TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025093073
公報種別
公開特許公報(A)
公開日
2025-06-23
出願番号
2023208577
出願日
2023-12-11
発明の名称
ハイブリッド車両の制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B60W
20/19 20160101AFI20250616BHJP(車両一般)
要約
【課題】モータに過度な負担がかかることを防止し、且つドライバの操作に対するエンジンの応答性を高くする。
【解決手段】第1MG71、第2MG72、及びエンジン10は、遊星歯車機構を介して互いに連結している。メモリ102は、ドライバによるアクセル操作とブレーキ操作との双方が行われている両操作状態で車両500が特定の走行位置を走行する際のリングギアの予測回転速度と、第1MG71が実現できる回転速度の最大値である最大回転速度と、共線図上においてサンギアが最大回転速度であるとともにリングギアが予測回転速度であるときにキャリアがとる回転速度である指定回転速度と、を目標情報として記憶している。CPU101は、両操作状態で車両500が特定の走行位置を含む一定領域を走行する場合、目標情報に基づいて、第1MG71、第2MG72、及びエンジン10を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
駆動輪に連動するリングギアと前記リングギアの中心で自転するサンギアと前記サンギア及び前記リングギアの間に介在して前記サンギアの周囲を公転するピニオンギアと前記ピニオンギアの公転に伴って回転するキャリアとを有する動力分配統合機構と、出力軸が前記キャリアに連結されたエンジンと、前記サンギアに連動する第1モータと、前記リングギアに連動する第2モータと、周囲を撮像するカメラと、を備えたハイブリッド車両に適用され、
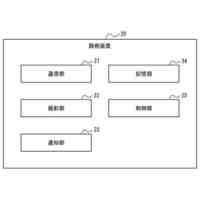
実行部と、記憶部と、を備え、
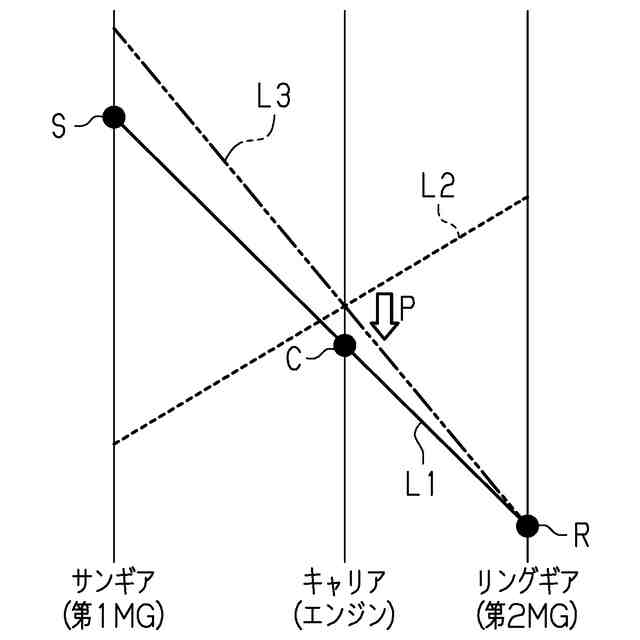
前記記憶部は、ドライバによるアクセル操作とブレーキ操作との双方が行われている両操作状態で前記ハイブリッド車両が特定の走行位置を走行する際の前記リングギアの予測回転速度と、前記第1モータが実現できる回転速度の最大値である最大回転速度と、前記サンギアと前記キャリアと前記リングギアとのそれぞれの回転速度の関係性を示す共線図上において前記サンギアが前記最大回転速度であるとともに前記リングギアが前記予測回転速度であるときに前記キャリアがとる回転速度である指定回転速度と、を目標情報として予め記憶しており、
前記実行部は、前記ハイブリッド車両の走行中、前記カメラの撮像画像に基づいて前記ハイブリッド車両の走行位置を取得する第1処理と、前記両操作状態で前記ハイブリッド車両が前記特定の走行位置を含む一定領域を走行する場合、前記目標情報を取得する処理、及び取得した前記目標情報に基づいて前記第1モータ、前記第2モータ、及び前記エンジンを制御する処理を含む第2処理と、を行う
ハイブリッド車両の制御装置。
発明の詳細な説明
【技術分野】
【0001】
この発明は、ハイブリッド車両の制御装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
特許文献1に開示されている車両は、第1モータと、第2モータと、エンジンと、遊星歯車機構と、を備えている。第1モータと、第2モータと、エンジンとは、遊星歯車機構を介して互いに連結している。第1モータと、第2モータと、エンジンとは、遊星歯車機構における3つの回転要素のそれぞれと連動して動作する。また、上記の車両は、所謂ブレーキオーバーライドシステム(以下、BOSと記す。)を採用している。BOSは、アクセルペダルとブレーキペダルとの双方が同時に踏み込まれた場合に、ブレーキペダルの踏み込みに基づく車両の制動を、アクセルペダルの踏み込みに基づく車両の加速に優先させるものである。
【先行技術文献】
【特許文献】
【0003】
特開2013-121753号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
遊星歯車機構を介して2つのモータとエンジンとを連結している特許文献1のような車両を、サーキットでのレースに使用することがある。ここで、レースでBOSを利用すると、カーブの前後でのドライバの各ペダル操作に対する車両の応答が遅れるおそれがある。また、レースでは、通常の道路を走行する場合とは異なり、走行に急激な加減速を伴うため、モータやエンジンに負担がかかりやすい。こうした負担を考慮しつつ、ドライバの操作に対して速やかな応答を実現できる技術が求められている。
【課題を解決するための手段】
【0005】
上記課題を解決するためのハイブリッド車両の制御装置は、駆動輪に連動するリングギアと前記リングギアの中心で自転するサンギアと前記サンギア及び前記リングギアの間に介在して前記サンギアの周囲を公転するピニオンギアと前記ピニオンギアの公転に伴って回転するキャリアとを有する動力分配統合機構と、出力軸が前記キャリアに連結されたエンジンと、前記サンギアに連動する第1モータと、前記リングギアに連動する第2モータと、周囲を撮像するカメラと、を備えたハイブリッド車両に適用され、実行部と、記憶部と、を備え、前記記憶部は、ドライバによるアクセル操作とブレーキ操作との双方が行われている両操作状態で前記ハイブリッド車両が特定の走行位置を走行する際の前記リングギアの予測回転速度と、前記第1モータが実現できる回転速度の最大値である最大回転速度と、前記サンギアと前記キャリアと前記リングギアとのそれぞれの回転速度の関係性を示す共線図上において前記サンギアが前記最大回転速度であるとともに前記リングギアが前記予測回転速度であるときに前記キャリアがとる回転速度である指定回転速度と、を目標情報として予め記憶しており、前記実行部は、前記ハイブリッド車両の走行中、前記カメラの撮像画像に基づいて前記ハイブリッド車両の走行位置を取得する第1処理と、前記両操作状態で前記ハイブリッド車両が前記特定の走行位置を含む一定領域を走行する場合、前記目標情報を取得する処理、及び取得した前記目標情報に基づいて前記第1モータ、前記第2モータ、及び前記エンジンを制御する処理を含む第2処理と、を行う。
【発明の効果】
【0006】
上記の技術思想では、第1モータに過度な負担がかかることを防止し、且つドライバの操作に対するエンジンの応答性が高くなる。
【図面の簡単な説明】
【0007】
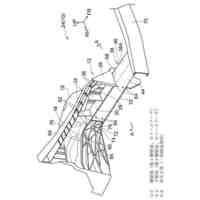
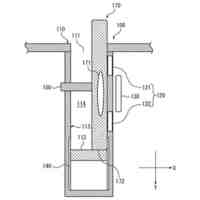
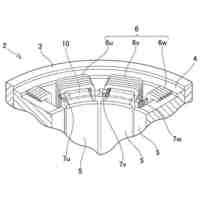
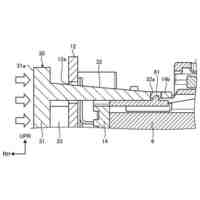
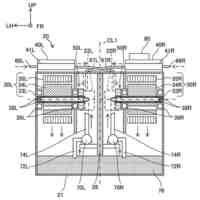
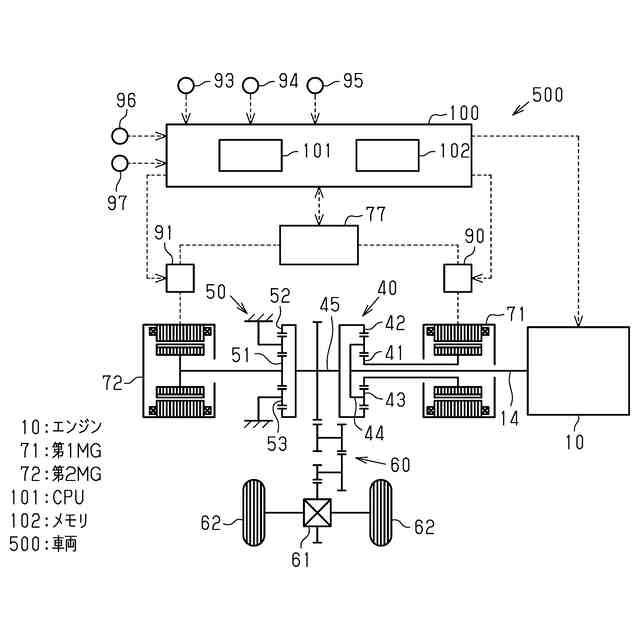
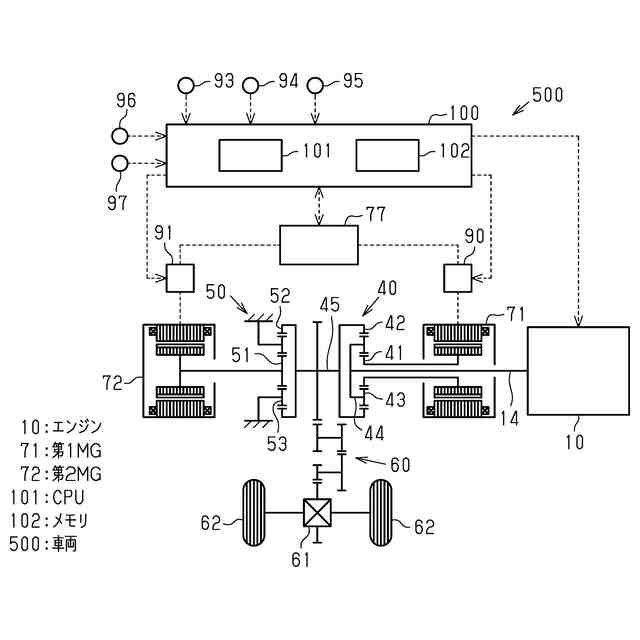
図1は、車両の概略構成図である。
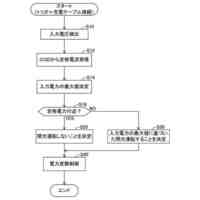
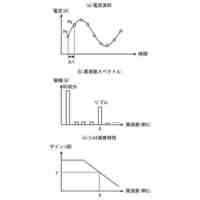
図2は、動力分配統合機構の各回転要素の回転速度の関係を示す図である。
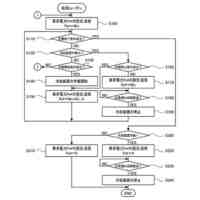
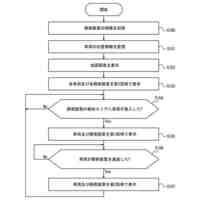
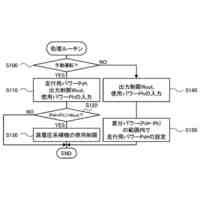
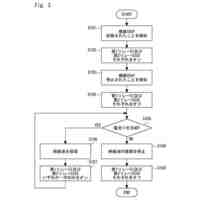
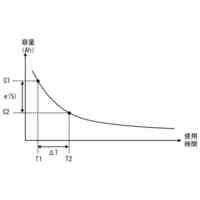
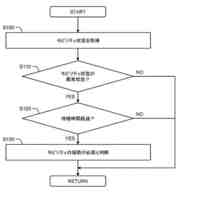
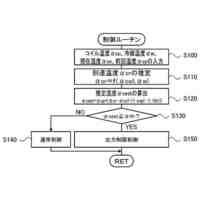
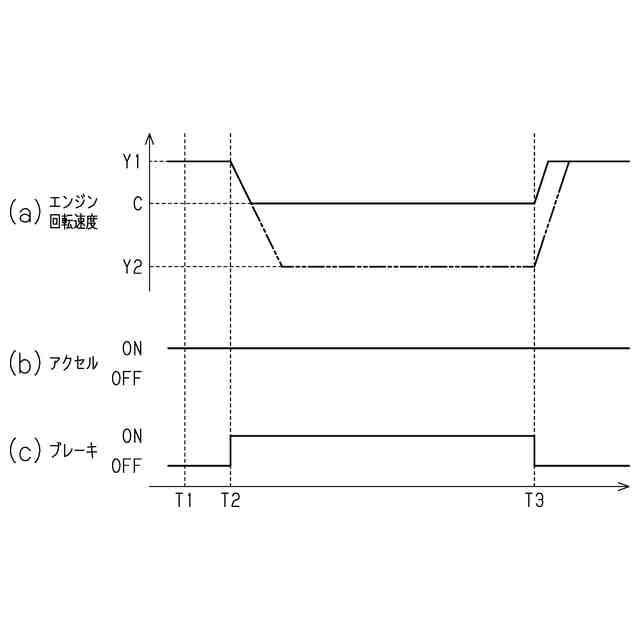
図3は、第2処理に伴うエンジンの回転速度の推移の例を表した図である。
【発明を実施するための形態】
【0008】
<車両の全体構成>
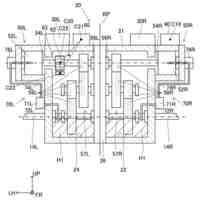
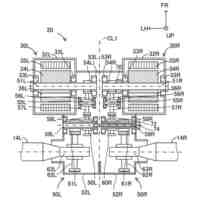
以下、ハイブリッド車両の制御装置の一実施形態を、図面を参照して説明する。図1に示すように、ハイブリッド車両(以下、車両と記す。)500は、エンジン10と、エンジン10の出力軸であるクランク軸14が接続された動力分配統合機構40と、動力分配統合機構40に接続されている第1モータジェネレータ(以下、第1MGと記す。)71及び第2モータジェネレータ(以下、第2MGと記す。)72と、を備えている。
【0009】
動力分配統合機構40は、遊星歯車機構であって、外歯歯車のサンギア41と、内歯歯車のリングギア42と、を備えている。サンギア41は、リングギア42の中心に位置している。サンギア41は、リングギア42と同軸で自転する。サンギア41とリングギア42との間には複数のピニオンギア43が介在している。各ピニオンギア43は、サンギア41及びリングギア42の双方と噛み合っている。各ピニオンギア43は自転可能且つサンギア41の周りを公転可能な状態でキャリア44に支持されている。キャリア44は、ピニオンギア43の公転に伴ってサンギア41と同軸で自転する。
【0010】
サンギア41は、第1MG71と連結している。すなわち、サンギア41は、第1MG71と連動するようになっている。キャリア44は、クランク軸14と連結している。すなわち、キャリア44は、クランク軸14と連動するようになっている。リングギア42は、リングギア軸45に接続している。そして、リングギア軸45は、リダクションギア50を介して第2MG72に連結している。すなわち、リングギア軸45ひいてはリングギア42は、第2MG72と連動するようになっている。また、リングギア軸45は、減速機構60及びディファレンシャル61を介して左右の駆動輪62に連結されている。すなわち、リングギア軸45ひいてはリングギア42は、駆動輪62と連動するようになっている。なお、第1MG71及び第2MG72は、個々にインバータ90,91を介してバッテリ77と電力を授受する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
方法
2日前
トヨタ自動車株式会社
方法
5日前
トヨタ自動車株式会社
電池
5日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
移動体
4日前
トヨタ自動車株式会社
電動車
4日前
トヨタ自動車株式会社
充電器
5日前
トヨタ自動車株式会社
電動車
5日前
トヨタ自動車株式会社
モータ
2日前
トヨタ自動車株式会社
充電器
2日前
トヨタ自動車株式会社
モータ
4日前
トヨタ自動車株式会社
電極体
10日前
トヨタ自動車株式会社
電源装置
4日前
トヨタ自動車株式会社
接続構造
9日前
トヨタ自動車株式会社
記録装置
10日前
トヨタ自動車株式会社
通知装置
9日前
トヨタ自動車株式会社
電動車両
5日前
トヨタ自動車株式会社
制御装置
5日前
トヨタ自動車株式会社
充電方法
2日前
トヨタ自動車株式会社
駆動装置
5日前
トヨタ自動車株式会社
電動車両
9日前
トヨタ自動車株式会社
路側装置
2日前
トヨタ自動車株式会社
燃料電池
2日前
トヨタ自動車株式会社
監視装置
9日前
トヨタ自動車株式会社
撮像方法
9日前
トヨタ自動車株式会社
管理装置
9日前
トヨタ自動車株式会社
制御装置
10日前
トヨタ自動車株式会社
電動車両
9日前
トヨタ自動車株式会社
コネクタ
4日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
駆動装置
4日前
トヨタ自動車株式会社
駆動装置
4日前
トヨタ自動車株式会社
駆動装置
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ