TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025062849
公報種別
公開特許公報(A)
公開日
2025-04-15
出願番号
2023172183
出願日
2023-10-03
発明の名称
車両および車両管理システム
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
B60L
58/12 20190101AFI20250408BHJP(車両一般)
要約
【課題】車両の電池残量が外乱によって計画よりも低下した場合に、生産性の低下を抑制しつつ、電欠を防止可能な車両および車両管理システムを提供する。
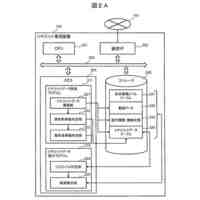
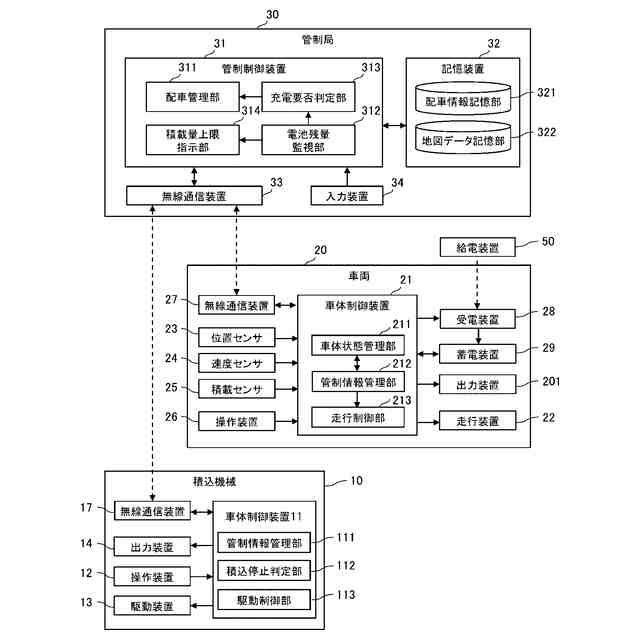
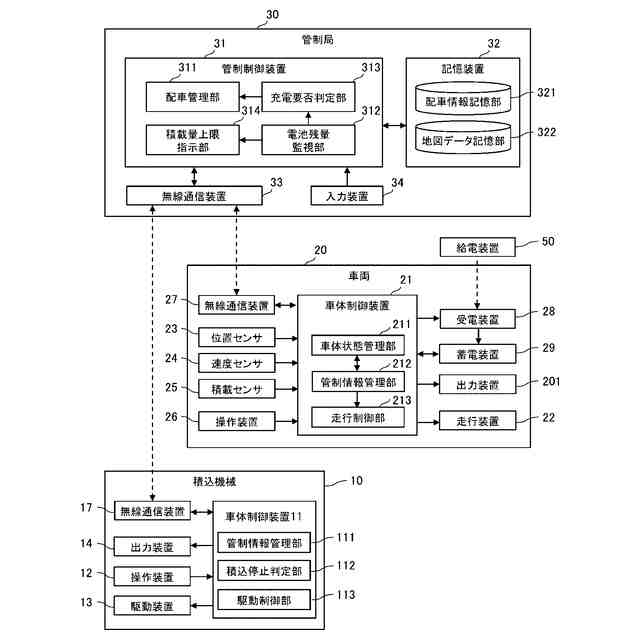
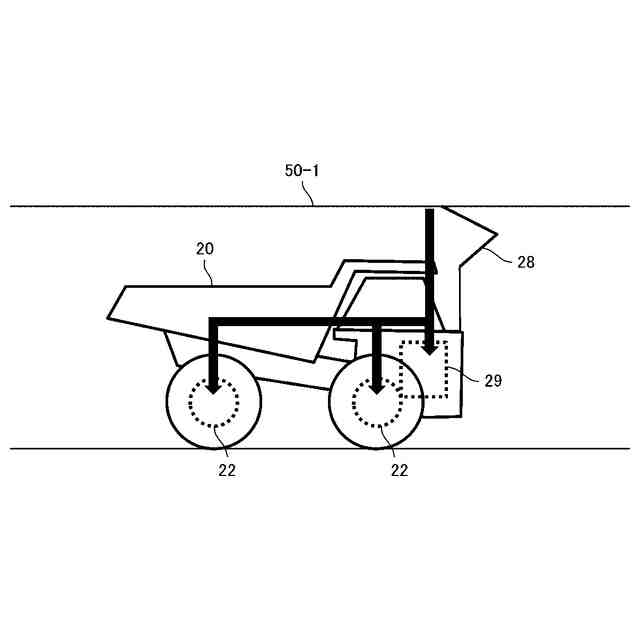
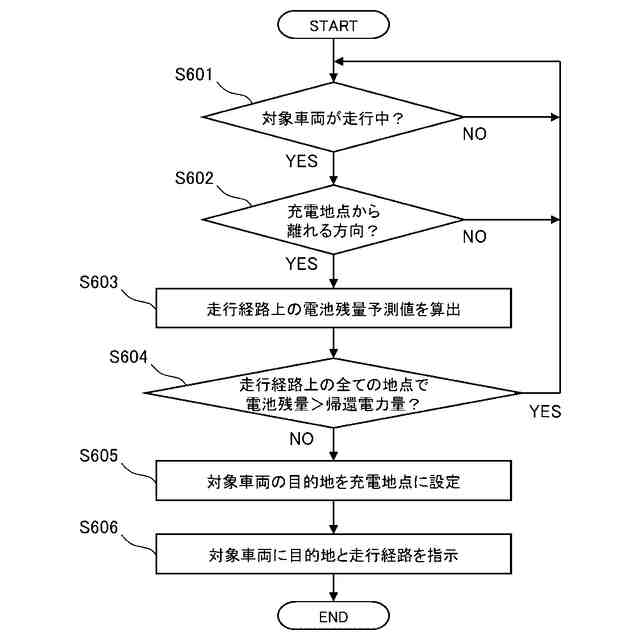
【解決手段】制御装置31は、車両20が、給電装置50が設けられた地点である充電地点から所定の目的地までの走行経路の走行を開始する以前に、地図データと車両20の積載量とに基づいて、前記走行経路上の各地点から前記充電地点まで走行するのに要する電力量である帰還電力量を算出し、車両20が前記走行経路を前記所定の目的地に向かって走行中に、車両20の現在位置から前記所定の目的地までの前記走行経路上の各地点における蓄電装置29の電池残量となる予測電力量を算出し、前記現在位置から前記所定の目的地までの前記走行経路上の各地点のうち、前記予測電力量が前記帰還電力量を下回る地点が存在する場合に、車両20の目的地を前記所定の目的地から他の目的地に変更する。
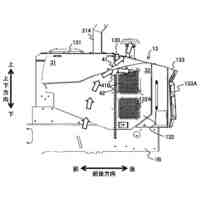
【選択図】 図2
特許請求の範囲
【請求項1】
給電装置から受電する受電装置と、
前記受電装置が受電した電力を蓄電する蓄電装置と、
位置を取得する位置センサと、
積載量を取得する積載センサと、
地図データを取得し、この地図データに基づいて目的地を設定する制御装置とを備えた車両において、
前記制御装置は、
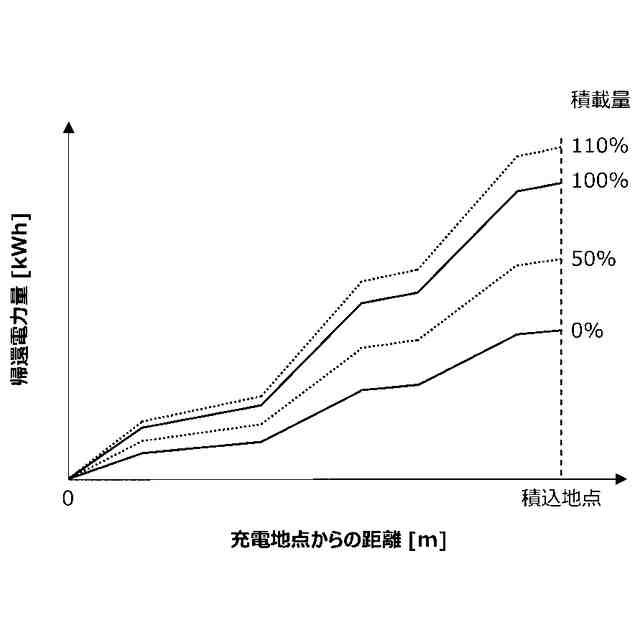
前記車両が、前記給電装置が設けられた地点である充電地点から所定の目的地までの走行経路の走行を開始する以前に、前記地図データと前記積載量とに基づいて、前記走行経路上の各地点から前記充電地点まで走行するのに要する電力量である帰還電力量を算出し、
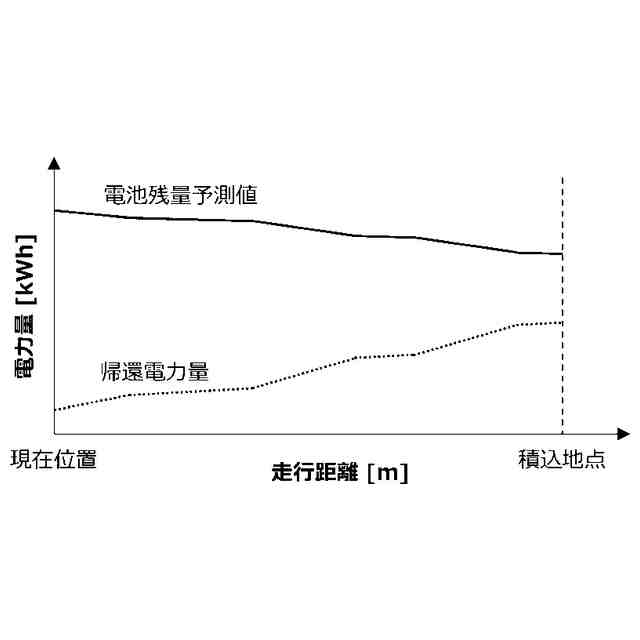
前記車両が前記走行経路を前記所定の目的地に向かって走行中に、前記位置センサで取得した前記車両の現在位置から前記所定の目的地までの前記走行経路上の各地点における前記蓄電装置の電池残量となる予測電力量を算出し、
前記現在位置から前記所定の目的地までの前記走行経路上の各地点のうち、前記予測電力量が前記帰還電力量を下回る地点が存在する場合に、前記車両の目的地を前記所定の目的地から他の目的地に変更する
ことを特徴とする車両。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の車両において、
前記他の目的地は、前記充電地点である
ことを特徴とする車両。
【請求項3】
請求項2に記載の車両において、
前記制御装置は、前記車両の目的地を前記所定の目的地から前記充電地点に変更した後に、前記車両が前記走行経路を前記充電地点から離れる方向に走行した場合に、前記充電地点への走行を促す警告を発報する
ことを特徴とする車両。
【請求項4】
請求項2に記載の車両において、
前記制御装置は、前記車両の目的地を前記所定の目的地から前記充電地点に変更した後に、前記車両が前記走行経路を前記充電地点から離れる方向に走行した場合に、前記車両の速度を制限する
ことを特徴とする車両。
【請求項5】
請求項1に記載の車両において、
前記制御装置は、前記車両の目的地を前記所定の目的地から他の目的地に変更する際に、前記現在位置から前記他の目的地の候補となる複数の目的地候補までの各走行経路のうち、前記予測電力量が前記帰還電力量を下回る地点が存在しない走行経路に対応する目的地候補を前記他の目的地として選択する
ことを特徴とする車両。
【請求項6】
請求項5に記載の車両において、
前記制御装置は、前記車両の積荷の種類に応じて前記複数の目的地候補を選択する
ことを特徴とする車両。
【請求項7】
請求項2に記載の車両において、
前記制御装置は、前記走行経路上または前記走行経路から分岐した走行経路上に前記充電地点を含む複数の充電地点が存在し、前記複数の充電地点までの全ての走行経路上に前記予測電力量が前記帰還電力量を下回る地点が存在する場合に、前記複数の充電地点のうち前記帰還電力量が最小となる充電地点を前記他の目的地として選択する
ことを特徴とする車両。
【請求項8】
地図データを記憶する記憶装置と、
前記地図データに基づいて車両の目的地を設定する管制制御装置とを備えた車両管理システムにおいて、
前記管制制御装置は、
前記車両が、給電装置が設けられた地点である充電地点から所定の目的地までの走行経路の走行を開始する以前に、前記地図データと前記車両の積載量とに基づいて、前記走行経路上の各地点から前記充電地点まで走行するのに要する電力量である帰還電力量を算出し、
前記車両が前記走行経路を前記目的地に向かって走行中に、前記車両の現在位置から前記所定の目的地までの前記走行経路上の各地点における前記車両の蓄電装置の電池残量となる予測電力量を算出し、
前記現在位置から前記所定の目的地までの前記走行経路上の各地点のうち、前記予測電力量が前記帰還電力量を下回る地点が存在する場合に、前記車両の目的地を前記所定の目的地から他の目的地に変更する
ことを特徴とする車両管理システム。
【請求項9】
請求項8に記載の車両管理システムにおいて、
前記他の目的地は、前記充電地点である
ことを特徴とする車両管理システム。
【請求項10】
請求項9に記載の車両管理システムにおいて、
前記管制制御装置は、前記車両の目的地を前記所定の目的地から前記充電地点に変更した後に、前記車両が前記走行経路を前記充電地点から離れる方向に走行した場合に、前記車両に前記充電地点への走行を促す警告を発報する
ことを特徴とする車両管理システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は車両管理システムに係り、特に蓄電装置を搭載した車両が走行する作業現場における車両管理技術に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
露天掘り鉱山等で稼働する、積込機械が採掘した鉱石や土砂を搬送する超大型ダンプトラックにおいては、車体に搭載したディーゼルエンジンで発電し、モータを駆動して走行する方式のものが広く使用されている。しかし、搬送作業に必要なエネルギー量は非常に大きいため、地球温暖化ガスの排出量が多いことが問題となっている。この解決に向け、従来のディーゼルエンジンによる発電ではなく、車載蓄電池によりモータを駆動するバッテリダンプの開発が進められている。
【0003】
このようなバッテリダンプでは、蓄電池の容量に対して、積込、搬送、放土の一連の作業を行う搬送サイクルあたりに要する電力量は非常に大きいため、例えば一回の搬送サイクルごとなど、頻繁な充電が必要となる。充電方式としては、搬送路内あるいはその近くに設置された充電ステーションで停止して充電する方法や、特許文献1に示すようにトロリー架線を用いて走行中に充電する方法が知られている。ここで、継続的な搬送作業を行うためには、電池残量が枯渇する電欠を防止することが必要である。そのためには、常に充電設備に戻れるだけ電池残量を確保する必要があり、あらかじめ走行経路上の消費電力量を考慮した走行計画を立て、それに従って走行することが求められる。そのような走行計画には、搬送サイクルに必要な電力量を充電するための充電ステーションでの充電時間や、同様にトロリー架線での充電時間を確保するための走行速度が含まれる。これらの充電時間が不足すると電欠を招くが、充電時間が多すぎると搬送サイクルの所要時間が増大して生産性が低下するため、搬送サイクルに対して必要十分な充電量を確保できる充電時間とすることが望ましい。
【0004】
しかしながら、搬送サイクル中の外乱により、電池残量が走行計画で想定した値よりも低下する場合がある。外乱の種類としては、まず、積込位置などを調整するリスポット、積込作業で過積載となった場合の例外的な放土作業、落石などによる一時停止・再発進といった計画外の作業や、交差点や搬送路上での他のダンプトラックやブルドーザなどの他車両とのインタラクションが挙げられる。また、路面状況によっては、ぬかるみでのタイヤの空転や、不整地での車輪トルク増大により、消費電力量が増大することもある。さらに、鉱山での過酷な温度条件によるバッテリー特性の変化や、ラジエータファンなどの補機の負荷の変化によって消費電力量が増大するといったことも考えられる。このように、鉱山の作業現場では消費電力量の増大につながる外乱要因が非常に多いため、前述のように充電時間を考慮した走行計画を立てたとしても、電池残量が不足する事態は容易に発生し得る。
【0005】
電池残量が計画よりも低下し、充電設備に到達する前に電欠状態となれば、例外的なバッテリダンプの回収や充電作業が発生し、鉱山全体の生産性が大幅に低下する。そのため、電欠状態の発生が予見された場合には、走行計画を変更し、充電地点まで戻ることが望ましい。このような問題に対し、特許文献2などに示す例では、車載電池で駆動する車両において、電池残量が低下した場合に、現在の電池残量で到達可能な充電設備の情報を表示する方法が開示されている。
【先行技術文献】
【特許文献】
【0006】
米国特許公開2015/0283907号公報
特許第7072597号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記特許文献2に示す方法を応用すれば、外乱によって電池残量が計画よりも低下した場合においても、充電地点までの走行計画を遂行可能であるかを判断し、不可能な場合には電欠を防止するために充電地点まで引き返すように走行計画を変更することが可能である。しかしながら、場合によっては走行計画の変更によって積込や放土作業を行わずに充電地点まで引き返すことになり、鉱山全体の生産性低下につながるという問題がある。
【0008】
本発明は、上記課題に鑑みてなされたものであり、その目的は、車両の電池残量が外乱によって計画よりも低下した場合に、生産性の低下を抑制しつつ、電欠を防止可能な車両および車両管理システムを提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明は、給電装置から受電する受電装置と、前記受電装置が受電した電力を蓄電する蓄電装置と、位置を取得する位置センサと、積載量を取得する積載センサと、地図データを取得し、この地図データに基づいて目的地を設定する制御装置とを備えた車両において、前記制御装置は、前記車両が、前記給電装置が設けられた地点である充電地点から所定の目的地までの走行経路の走行を開始する以前に、前記地図データと前記積載量とに基づいて、前記走行経路上の各地点から前記充電地点まで走行するのに要する電力量である帰還電力量を算出し、前記車両が前記走行経路を前記所定の目的地に向かって走行中に、前記位置センサで取得した前記車両の現在位置から前記所定の目的地までの前記走行経路上の各地点における前記蓄電装置の電池残量となる予測電力量を算出し、前記現在位置から前記所定の目的地までの前記走行経路上の各地点のうち、前記予測電力量が前記帰還電力量を下回る地点が存在する場合に、前記車両の目的地を前記所定の目的地から他の目的地に変更するものとする。
【0010】
また、本発明は、地図データを記憶する記憶装置と、前記地図データに基づいて車両の目的地を設定する管制制御装置とを備えた車両管理システムにおいて、前記管制制御装置は、前記車両が、給電装置が設けられた地点である充電地点から所定の目的地までの走行経路の走行を開始する以前に、前記地図データと前記車両の積載量とに基づいて、前記走行経路上の各地点から前記充電地点まで走行するのに要する電力量である帰還電力量を算出し、前記車両が前記走行経路を前記目的地に向かって走行中に、前記車両の現在位置から前記所定の目的地までの前記走行経路上の各地点における前記蓄電装置の電池残量となる予測電力量を算出し、前記現在位置から前記所定の目的地までの前記走行経路上の各地点のうち、前記予測電力量が前記帰還電力量を下回る地点が存在する場合に、前記車両の目的地を前記所定の目的地から他の目的地に変更するものとする。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
建設機械
1日前
日立建機株式会社
建設機械
28日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
減速装置
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
26日前
日立建機株式会社
作業機械
20日前
日立建機株式会社
建設機械
5日前
日立建機株式会社
建設機械
3か月前
日立建機株式会社
電子機器装置
20日前
日立建機株式会社
電動式建設機械
5日前
日立建機株式会社
ダンプトラック
19日前
日立建機株式会社
ダンプトラック
1か月前
日立建機株式会社
コントローラの筐体
2か月前
日立建機株式会社
点検ワークフロー管理システム
1か月前
日立建機株式会社
情報処理装置および情報処理方法
3か月前
日立建機株式会社
オプション用機器着脱支援システムおよび作業機械
5日前
日立建機株式会社
作業機械
2か月前
個人
カーテント
1か月前
個人
警告装置
3か月前
個人
車窓用防虫網戸
2か月前
個人
小型EVシステム
3か月前
日本精機株式会社
ケース
3か月前
個人
ホイルのボルト締結
28日前
個人
車輪清掃装置
2か月前
井関農機株式会社
作業車両
1か月前
個人
車両通過構造物
今日
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
3か月前
個人
キャンピングトライク
1か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
4か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ