TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025013694
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2024198218,2020051329
出願日
2024-11-13,2020-03-23
発明の名称
センサ評価装置
出願人
株式会社デンソー
代理人
名古屋国際弁理士法人
主分類
G08G
1/16 20060101AFI20250117BHJP(信号)
要約
【課題】センサの評価に使用できるセンサ評価装置を提供すること。
【解決手段】センサ評価装置1は、センサ搭載物に搭載された第1センサ5を評価する。センサ評価装置は、特定事象検出ユニットと、記録ユニットとを備える。特定事象検出ユニットは、(a)前記センサ搭載物に搭載された第2センサ7、9、11は第1物標を認識し、前記第1センサは前記第1物標を認識しない未認識事象検出する未認識事象検出処理を実行し、次に、(b)前記第1センサは第2物標を認識し、前記第2センサは前記第2物標を認識しない誤認識事象を検出する誤認識事象検出処理を実行する。記録ユニットは、前記未認識事象又は前記誤認識事象である特定事象を検出した場合に、前記特定事象に関する情報を記録する。
【選択図】図1
特許請求の範囲
【請求項1】
センサ搭載物(3)に搭載された第1センサ(5)を評価するセンサ評価装置(1)であって、
(a)前記センサ搭載物に搭載された第2センサ(7、9、11)は第1物標を認識し、前記第1センサは前記第1物標を認識
せず、前記センサ搭載物から前記第1物標までの距離が閾値未満であり、前記第2センサはカメラを含む
未認識事象
を検出する未認識事象検出処理を実行し、次に、(
b)前記第1センサは第2物標を認識し、前記第2センサは前記第2物標を認識
せず、前記センサ搭載物から前記第2物標までの距離が閾値以上であり、前記第2センサはライダーを含む
誤認識事象
を検出する誤認識事象検出処理を実行
するように構成された特定事象検出ユニット(17)と、
前記特定事象検出ユニットが前記
未認識事象又は前記誤認識事象である
特定事象を検出した場合に、前記特定事象に関する情報を記録する記録ユニット(19)と、
を備えるセンサ評価装置。
続きを表示(約 420 文字)
【請求項2】
請求項1に記載のセンサ評価装置であって、
前記特定事象検出ユニットが前記特定事象を検出した場合に、オペレータに報知を行う報知ユニット(21)と、
前記オペレータの入力を受け付ける入力ユニット(23)と、
をさらに備え、
前記記録ユニットは、前記報知ユニットが前記報知を行った後に、前記入力ユニットが前記入力を受け付けることを条件として、前記特定事象に関する情報を記録するように構成されたセンサ評価装置。
【請求項3】
請求項1又は2に記載のセンサ評価装置であって、
前記センサ搭載物は車両(3)であるセンサ評価装置。
【請求項4】
請求項1~3のいずれか1項に記載のセンサ評価装置であって、
前記第1センサ及び前記第2センサは、それぞれ、カメラ、ライダー、ミリ波レーダ、及びソナーから成る群から選択される1以上を含むセンサ評価装置。
発明の詳細な説明
【技術分野】
【0001】
本開示はセンサ評価装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1に境界線認識装置が記載されている。境界線認識装置は、車両に搭載された複数のセンサを利用して境界線を認識する。
【先行技術文献】
【特許文献】
【0003】
特開2015-219569号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
センサの性能は、車両におけるセンサの搭載位置、天候等に影響される。また、好適な搭載位置は、センサの種類ごとに異なることがある。センサの種類、センサの搭載位置等を決定するためには、センサを使用する環境でセンサの評価を行う必要がある。本開示の1つの局面では、センサの評価に使用できるセンサ評価装置を提供することが好ましい。
【課題を解決するための手段】
【0005】
本開示の1つの局面は、センサ搭載物(3)に搭載された第1センサ(5)を評価するセンサ評価装置(1)である。センサ評価装置は、(a)前記センサ搭載物に搭載された第2センサ(7、9、11)は第1物標を認識し、前記第1センサは前記第1物標を認識
せず、前記センサ搭載物から前記第1物標までの距離が閾値未満であり、前記第2センサはカメラを含む
未認識事象
を検出する未認識事象検出処理を実行し、次に、(
b)前記第1センサは第2物標を認識し、前記第2センサは前記第2物標を認識
せず、前記センサ搭載物から前記第2物標までの距離が閾値以上であり、前記第2センサはライダーを含む
誤認識事象
を検出する誤認識事象検出処理を実行
するように構成された特定事象検出ユニット(17)と、前記特定事象検出ユニットが前記
未認識事象又は前記誤認識事象である
特定事象を検出した場合に、前記特定事象に関する情報を記録する記録ユニット(19)と、を備える。
【0006】
本開示の1つの局面であるセンサ評価装置は、第1センサがセンサ搭載物に搭載された状態で、特定事象を検出することができる。本開示の1つの局面であるセンサ評価装置は、特定事象を検出した場合に、特定事象に関する情報を記録することができる。例えば、ユーザは、特定事象に関する情報を解析することで、第1センサを評価することができる。
【図面の簡単な説明】
【0007】
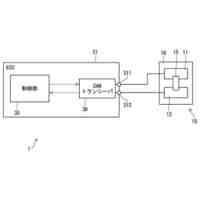
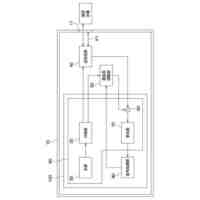
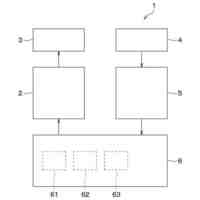
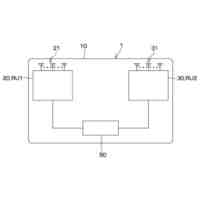
センサ評価装置の構成を表すブロック図である。
センサ評価装置の機能的構成を表すブロック図である。
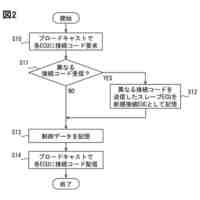
センサ評価装置が実行する処理を表すフローチャートである。
センサ評価装置が実行する未認識事象検出処理を表すフローチャートである。
センサ評価装置が実行する評価対象車線算出処理を表すフローチャートである。
センサ評価装置が実行する誤認識事象検出処理を表すフローチャートである。
【発明を実施するための形態】
【0008】
本開示の例示的な実施形態について図面を参照しながら説明する。
<第1実施形態>
1.センサ評価装置1の構成
センサ評価装置1の構成を、図1及び図2に基づき説明する。図1に示すように、センサ評価装置1は車両3に搭載されている。車両3はセンサ搭載物に対応する。車両3には、評価対象センサ5、ミリ波レーダ7、ライダー9、及びカメラ11が搭載されている。
【0009】
評価対象センサ5は、例えば、カメラ、ライダー、ミリ波レーダ、又はソナーである。評価対象センサ5は第1センサに対応する。ミリ波レーダ7、ライダー9、及びカメラ11は第2センサに対応する。
【0010】
評価対象センサ5、ミリ波レーダ7、ライダー9、及びカメラ11は、それぞれ、車両3の周辺に存在する物標を認識可能である。評価対象センサ5、ミリ波レーダ7、ライダー9、及びカメラ11は、共通する認識範囲を有する。よって、評価対象センサ5、ミリ波レーダ7、ライダー9、及びカメラ11は、物標を認識するときの環境等が好適であれば、その共通する認識範囲に存在する1つの物標をそれぞれ認識することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
変調器
1か月前
株式会社デンソー
表示装置
21日前
株式会社デンソー
検出装置
6日前
株式会社デンソー
駆動回路
10日前
株式会社デンソー
測距装置
今日
株式会社デンソー
駆動装置
今日
株式会社デンソー
駆動装置
今日
株式会社デンソー
生体電極
1か月前
株式会社デンソー
熱交換器
6日前
株式会社デンソー
測距装置
13日前
株式会社デンソー
整流回路
1か月前
株式会社デンソー
光学部材
今日
株式会社デンソー
光干渉計
21日前
株式会社デンソー
回転電機
13日前
株式会社デンソー
診断装置
13日前
株式会社デンソー
光学部材
15日前
株式会社デンソー
検出装置
23日前
株式会社デンソー
演算装置
13日前
株式会社デンソー
回転電機
22日前
株式会社デンソー
半導体装置
10日前
株式会社デンソー
半導体装置
10日前
株式会社デンソー
半導体装置
10日前
株式会社デンソー
半導体装置
10日前
株式会社デンソー
半導体装置
10日前
株式会社デンソー
送受信装置
22日前
株式会社デンソー
半導体装置
10日前
株式会社デンソー
半導体装置
10日前
株式会社デンソー
半導体装置
13日前
株式会社デンソー
レーダ装置
13日前
株式会社デンソー
レーダ装置
13日前
株式会社デンソー
電磁継電器
1か月前
株式会社デンソー
半導体装置
13日前
株式会社デンソー
レーダ装置
13日前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
レーダ装置
1か月前
株式会社デンソー
半導体装置
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ