TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024126120
公報種別
公開特許公報(A)
公開日
2024-09-20
出願番号
2023034303
出願日
2023-03-07
発明の名称
制御装置、制御方法、及びプログラム
出願人
富士電機株式会社
代理人
個人
,
個人
主分類
G05B
13/02 20060101AFI20240912BHJP(制御;調整)
要約
【課題】制御性能の低下を抑制できる技術を提供すること。
【解決手段】本開示の一態様による制御装置は、制御対象に対する操作量を出力し、前記制御対象の制御量を目標値に追従させる制御装置であって、第1の制御周期T
c
毎に、前記操作量と前記制御量とに基づいて、モデル予測制御により前記制御対象に対する次の操作量u
a
を出力する主制御部と、前記第1の制御周期T
c
よりも短い第2の制御周期T
f
毎に、前記制御対象に対する次の操作量u
b
を出力する高速補完制御部と、を有し、前記高速補完制御部は、前記主制御部から前記操作量u
a
が出力された直後の時刻t
0
における前記制御量と、所定の先読み長T
p
と、前記目標値とに基づいて、前記先読み長T
p
後における目標偏差の予測値である予測目標偏差e
f
を計算し、前記予測目標偏差e
f
と所定のゲインk
I
とに基づいて計算した瞬時的な操作変化量の平均と前記操作量u
a
との和を前記操作量u
b
として計算する。
【選択図】図1
特許請求の範囲
【請求項1】
制御対象に対する操作量を出力し、前記制御対象の制御量を目標値に追従させる制御装置であって、
第1の制御周期T
c
毎に、前記操作量と前記制御量とに基づいて、モデル予測制御により前記制御対象に対する次の操作量u
a
を出力する主制御部と、
前記第1の制御周期T
c
よりも短い第2の制御周期T
f
毎に、前記制御対象に対する次の操作量u
b
を出力する高速補完制御部と、を有し、
前記高速補完制御部は、
前記主制御部から前記操作量u
a
が出力された直後の時刻t
0
における前記制御量と、所定の先読み長T
p
と、前記目標値とに基づいて、前記先読み長T
p
後における目標偏差の予測値である予測目標偏差e
f
を計算し、
前記予測目標偏差e
f
と所定のゲインk
I
とに基づいて計算した瞬時的な操作変化量の平均と前記操作量u
a
との和を前記操作量u
b
として計算する、制御装置。
続きを表示(約 2,000 文字)
【請求項2】
前記高速補完制御部は、
前記予測目標偏差e
f
に対して前記ゲインk
I
を乗じることで、前記瞬時的な操作変化量を計算する、請求項1に記載の制御装置。
【請求項3】
前記先読み長T
p
と前記ゲインk
I
は、
前記モデル予測制御に用いられる予測モデルに基づいて計算される、請求項2に記載の制御装置。
【請求項4】
前記高速補完制御部は、
前記時刻t
0
における前記制御量から前記先読み長T
p
後に前記目標値に到達するような線形な制御軌道を用いて、前記目標値と、現在時刻tにおける前記制御量から前記制御軌道により予測される時刻t
0
+T
p
の前記制御量との差を前記予測目標偏差e
f
として計算する、請求項1乃至3の何れか一項に記載の制御装置。
【請求項5】
前記高速補完制御部は、
前記時刻t
0
における前記制御量から現在時刻tにおける前記制御量までの線形な制御軌道により予測される時刻t
0
+T
p
の前記制御量と、前記目標値と差を前記予測目標偏差e
f
として計算する、請求項1乃至3の何れか一項に記載の制御装置。
【請求項6】
前記高速補完制御部は、
前記時刻t
0
における初期値を0として、前記第2の制御周期T
f
毎にインクリメントされるカウンタkを用いて、前記カウンタkに関する前記予測目標偏差e
f
(k)と前記瞬時的な操作変化量の平均とを計算する、請求項1に記載の制御装置。
【請求項7】
前記高速補完制御部は、
前記主制御部から出力される前記操作量u
a
に適用される上下限範囲を用いて、前記上下限範囲を満たす前記操作量u
b
を計算する、請求項1に記載の制御装置。
【請求項8】
制御対象に対する操作量を出力し、前記制御対象の制御量を目標値に追従させる制御装置が、
第1の制御周期T
c
毎に、前記操作量と前記制御量とに基づいて、モデル予測制御により前記制御対象に対する次の操作量u
a
を出力する主制御手順と、
前記第1の制御周期T
c
よりも短い第2の制御周期T
f
毎に、前記制御対象に対する次の操作量u
b
を出力する高速補完制御手順と、を実行し、
前記高速補完制御手順は、
前記主制御手順で前記操作量u
a
が出力された直後の時刻t
0
における前記制御量と、所定の先読み長T
p
と、前記目標値とに基づいて、前記先読み長T
p
後における目標偏差の予測値である予測目標偏差e
f
を計算し、
前記予測目標偏差e
f
と所定のゲインk
I
とに基づいて計算した瞬時的な操作変化量の平均と前記操作量u
a
との和を前記操作量u
b
として計算する、制御方法。
【請求項9】
制御対象に対する操作量を出力し、前記制御対象の制御量を目標値に追従させる制御装置に、
第1の制御周期T
c
毎に、前記操作量と前記制御量とに基づいて、モデル予測制御により前記制御対象に対する次の操作量u
a
を出力する主制御手順と、
前記第1の制御周期T
c
よりも短い第2の制御周期T
f
毎に、前記制御対象に対する次の操作量u
b
を出力する高速補完制御手順と、を実行させ、
前記高速補完制御手順は、
前記主制御手順で前記操作量u
a
が出力された直後の時刻t
0
における前記制御量と、所定の先読み長T
p
と、前記目標値とに基づいて、前記先読み長T
p
後における目標偏差の予測値である予測目標偏差e
f
を計算し、
前記予測目標偏差e
f
と所定のゲインk
I
とに基づいて計算した瞬時的な操作変化量の平均と前記操作量u
a
との和を前記操作量u
b
として計算する、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置、制御方法、及びプログラムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
制御対象の制御量を目標値に追従させることを目的とする制御方式の1つとして、モデル予測制御が知られている。例えば、PLC(Programmable Logic Controller)やDCS(Distributed Control System)等のエッジデバイス上でモデル予測制御を実現しつつ、モデル予測制御に必要な制御パラメータも自動調整する技術が提案されている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特許第7014330号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、モデル予測制御の制御周期は、制御対象の時定数に応じて適切に定める必要がある。予測の効果を十分に発揮するためには時定数に応じて或る程度長い制御周期を定める必要があるが、長過ぎる制御周期は制御性能が低下することがあるためである。
【0005】
本開示は、上記の点に鑑みてなされたもので、制御性能の低下を抑制できる技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
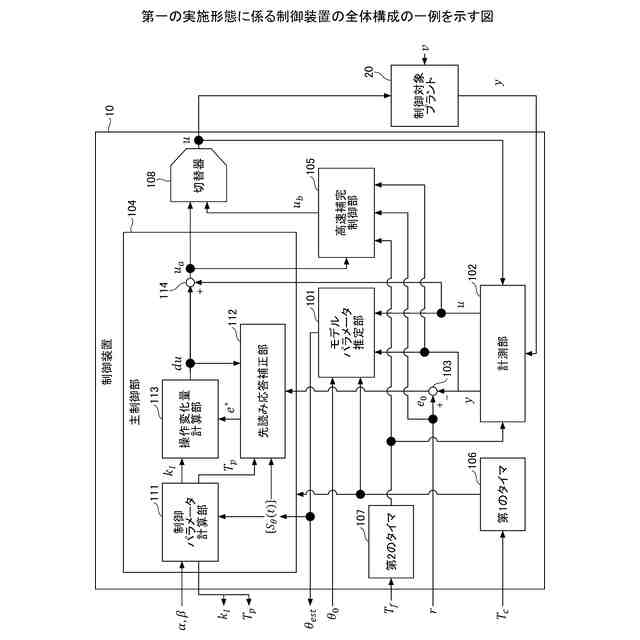
本開示の一態様による制御装置は、制御対象に対する操作量を出力し、前記制御対象の制御量を目標値に追従させる制御装置であって、第1の制御周期T
c
毎に、前記操作量と前記制御量とに基づいて、モデル予測制御により前記制御対象に対する次の操作量u
a
を出力する主制御部と、前記第1の制御周期T
c
よりも短い第2の制御周期T
f
毎に、前記制御対象に対する次の操作量u
b
を出力する高速補完制御部と、を有し、前記高速補完制御部は、前記主制御部から前記操作量u
a
が出力された直後の時刻t
0
における前記制御量と、所定の先読み長T
p
と、前記目標値とに基づいて、前記先読み長T
p
後における目標偏差の予測値である予測目標偏差e
f
を計算し、前記予測目標偏差e
f
と所定のゲインk
I
とに基づいて計算した瞬時的な操作変化量の平均と前記操作量u
a
との和を前記操作量u
b
として計算する。
【発明の効果】
【0007】
制御性能の低下を抑制できる技術が提供される。
【図面の簡単な説明】
【0008】
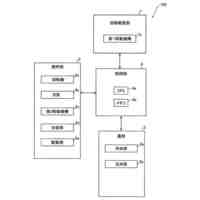
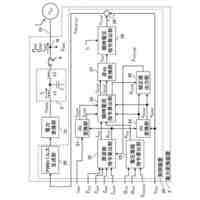
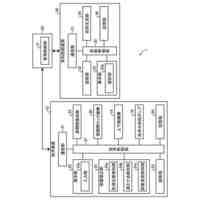
第一の実施形態に係る制御装置の全体構成の一例を示す図である。
プラント応答関数の動作の一例を説明するための図である。
プラント応答関数の計算処理の一例を説明するためのフローチャートである。
モデルパラメータの推定処理の一例を説明するためのフローチャートである。
先読み応答補正部の動作の一例を説明するための図である。
操作変化量計算部の動作の一例を説明するための図である。
制御パラメータの計算処理の一例を説明するためのフローチャートである。
先読み長の計算概要の一例を説明するための図である。
先読み長の計算処理の一例を説明するためのフローチャートである。
高速補完制御部の動作の一例を説明するための図である。
補完操作量の計算処理の一例を説明するためのフローチャートである。
予測目標偏差の一例を説明するための図(その1)である。
予測目標偏差の一例を説明するための図(その2)である。
高速補完制御部を用いた場合の応答の一例を説明するための図である。
第一の実施形態に係る制御装置のハードウェア構成の一例を示す図である。
第二の実施形態に係る制御装置の全体構成の一例を示す図である。
実施例におけるプラント応答を示す図である。
実施例において高速補完制御が無効である場合の制御量、目標値及び操作量を示す図である。
実施例において高速補完制御が有効である場合の制御量、目標値及び操作量を示す図(その1)である。
実施例において高速補完制御が有効である場合の制御量、目標値及び操作量を示す図(その2)である。
【発明を実施するための形態】
【0009】
以下、本発明の一実施形態について、図面を参照しながら詳細に説明する。以下では、モデル予測制御の制御周期が長過ぎることによる制御性能の低下を抑制できる制御装置10について説明する。なお、以下で説明する制御装置10は、例えば、PC(パーソナルコンピュータ)等と比較して計算資源が乏しいエッジデバイス(PLCやDCS等)であることを想定する。
【0010】
ここで、一般に、時定数が長い制御対象に対してあまりに短い制御周期を定めた場合、予測の効果が十分に発揮できないことがある。また、多くのメモリを消費してしまったり、モデルが正しく同定できなかったりする傾向がある。他方で、長過ぎる制御周期を定めた場合、制御タイミングの間に生じた目標値(制御量に対する目標値)の変更や外乱等の影響を制御に反映できず、制御性能が低下してしまうことがある。このため、制御対象の時定数に応じて適切に長い制御周期を定める必要があるものの、制御周期が長過ぎることによって制御性能が低下してしまうことがあるというジレンマが存在する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
富士電機株式会社
冷却器
4日前
富士電機株式会社
冷却器
4日前
富士電機株式会社
搬送装置
22日前
富士電機株式会社
電子装置
8日前
富士電機株式会社
電磁接触器
16日前
富士電機株式会社
半導体装置
26日前
富士電機株式会社
半導体装置
1か月前
富士電機株式会社
半導体装置
8日前
富士電機株式会社
半導体装置
8日前
富士電機株式会社
飲料供給装置
19日前
富士電機株式会社
飲料製造装置
8日前
富士電機株式会社
電力変換装置
8日前
富士電機株式会社
沸騰冷却装置
8日前
富士電機株式会社
飲料供給装置
8日前
富士電機株式会社
ガス分析装置
16日前
富士電機株式会社
原料払出装置
4日前
富士電機株式会社
電力変換装置
16日前
富士電機株式会社
電力変換装置
1日前
富士電機株式会社
光触媒殺菌装置
15日前
富士電機株式会社
多管式熱交換器
8日前
富士電機株式会社
半導体モジュール
9日前
富士電機株式会社
自動販売機システム
8日前
富士電機株式会社
炭化珪素半導体装置
16日前
富士電機株式会社
炭化珪素半導体装置
8日前
富士電機株式会社
炭化珪素半導体装置
9日前
富士電機株式会社
半導体装置の製造方法
23日前
富士電機株式会社
解析方法、及び解析装置
22日前
富士電機株式会社
電力変換装置の制御装置
9日前
富士電機株式会社
電力変換装置の制御装置
9日前
富士電機株式会社
遮断器の二重投入防止機構
9日前
富士電機株式会社
制御システムおよび制御方法
4日前
富士電機株式会社
制御システムおよび制御方法
8日前
富士電機株式会社
洗浄装置及び洗浄供給システム
19日前
富士電機株式会社
冷却器、および冷却器の製造方法
15日前
富士電機株式会社
ワイドバンドギャップ半導体装置
29日前
富士電機株式会社
炭化珪素半導体装置及びその製造方法
15日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ