TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024074560
公報種別
公開特許公報(A)
公開日
2024-05-31
出願番号
2022185805
出願日
2022-11-21
発明の名称
建設作業施工方法及び建設作業施工装置
出願人
株式会社大林組
,
株式会社三松
代理人
個人
,
個人
主分類
E04G
21/14 20060101AFI20240524BHJP(建築物)
要約
【課題】建設部材の施工対象面に対して的確に処理を実行する建設作業施工方法及び建設作業施工装置を提供する。
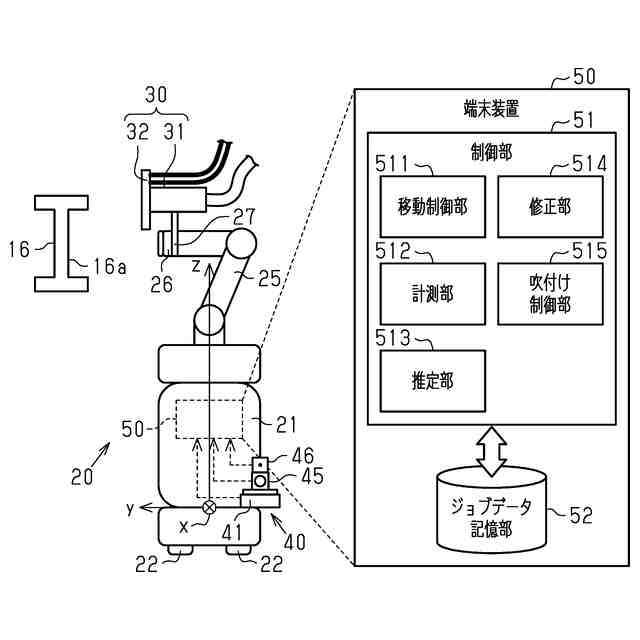
【解決手段】ロボットアーム25が固定された吹付け装置20の本体部21の周囲の予め定められた位置に、複数のターゲットを配置する。吹付け装置20の本体部21に、鉛直軸を中心として回転するように距離計測器46を設けるとともに、ロボットアーム25の先端部26の位置を調整する制御部51を設ける。そして、距離計測器46を、水平面で旋回させることによりターゲットまでの距離及び旋回角度を計測する。制御部51は、計測した距離及び旋回角度を用いて、吹付け装置20の本体部21の姿勢を特定し、この姿勢に応じてロボットアーム25の先端部26の位置を調整して、施工対象面16aに対して、梁16の施工対象面16aに対する吹付け作業を実行する。
【選択図】図2
特許請求の範囲
【請求項1】
ロボットアームを用いて、建設部材の施工対象面に対する建設作業を施工する建設作業施工方法であって、
前記ロボットアームが固定された装置本体の周囲の予め定められた位置に、複数のターゲットを配置し、
水平面で旋回する距離計測器で前記各ターゲットまでの距離及び旋回角度を計測し、
前記計測した距離及び旋回角度を用いて、前記装置本体の姿勢を特定し、
前記姿勢に応じて、前記ロボットアームの先端部の位置を調整して、前記施工対象面に対して施工を行なうことを特徴とする建設作業施工方法。
続きを表示(約 630 文字)
【請求項2】
前記装置本体は撮影装置を備え、
前記撮影装置が撮影した撮影画像の視野の中心鉛直軸上に、前記距離計測器のレーザ光を照射し、
前記撮影画像の中心鉛直軸上にターゲットがある場合に、前記距離計測器で距離を計測することを特徴とする請求項1に記載の建設作業施工方法。
【請求項3】
前記先端部には、前記施工対象面を被覆する吹付け材を吐出する吐出部を取り付け、
前記吐出部から前記吹付け材を吹付ける作業を、前記建設作業として行なうことを特徴とする請求項1又は2に記載の建設作業施工方法。
【請求項4】
ロボットアームを用いて、建設部材の施工対象面に対する建設作業を施工する建設作業施工装置であって、
前記ロボットアームが固定された装置本体の周囲の予め定められた位置に、複数のターゲットを配置し、
前記装置本体に、鉛直軸を中心として回転するように距離計測器を設けるとともに、前記ロボットアームの先端部の位置を調整する制御部を設け、
前記距離計測器を水平面で旋回させることにより、前記各ターゲットまでの距離及び旋回角度を計測し、
前記制御部は、
前記計測した距離及び旋回角度を用いて、前記装置本体の姿勢を特定し、
前記姿勢に応じて前記ロボットアームの先端部の位置を調整して、前記施工対象面に対して施工を行なうことを特徴とする建設作業施工装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、建設部材の施工対象面に対して吹付け材を吹付ける吹付け方法等の建設作業施工方法及び建設作業施工装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
ロボットアームを利用して、梁に耐火被覆材を吹付ける場合、吹付け作業対象面に対して実施する吹付け内容に基づいて作成されるジョブファイルを用いることがある(例えば、特許文献1参照。)。この特許文献1に記載の建設作業装置は、ロボットアームの動作を制御するアーム制御装置を備える。アーム制御装置は、作業対象面を設定された建設部材の設計情報と、作業対象面に対して実施する作業内容とに基づいて作成されるジョブファイルに従って、ロボットアームを動作させる。更に、アーム制御装置は、設計情報と現実の表面形状に係る計測データとに基づいて、位置及び姿勢に係る施工誤差を検出し、この検出された施工誤差に基づいて、ジョブファイルを修正する。
【先行技術文献】
【特許文献】
【0003】
特開2020-56277号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術では、位置及び姿勢に係わる施工誤差の検出に、施工対象の天井梁を含む作業周辺領域の3次元形状モデルとしての点群モデルを生成する。このため、点群モデルの生成のためには、3次元の点群を取得する必要がある。この場合、1軸回りに回転させながらレーザを照射させた層を複数、取得する。従って、施工誤差を特定するために、手間や時間が掛かっていた。更に、この点群モデルを用いて位置を推定した場合には、数cm~数十cmの誤差が生じることがあった。
【課題を解決するための手段】
【0005】
上記課題を解決する建設作業施工方法は、ロボットアームを用いて、建設部材の施工対象面に対する建設作業を施工する建設作業施工方法であって、前記ロボットアームが固定された装置本体の周囲の予め定められた位置に、複数のターゲットを配置し、水平面で旋回する距離計測器で前記各ターゲットまでの距離及び旋回角度を計測し、前記計測した距離及び旋回角度を用いて、前記装置本体の姿勢を特定し、前記姿勢に応じて、前記ロボットアームの先端部の位置を調整して、前記施工対象面に対して施工を行なう。
【発明の効果】
【0006】
本発明によれば、建設部材の施工対象面に対して的確に処理を実行することができる。
【図面の簡単な説明】
【0007】
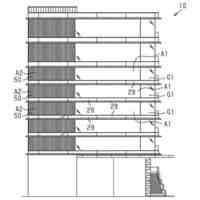
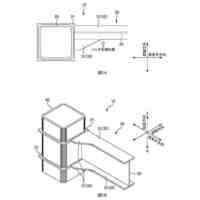
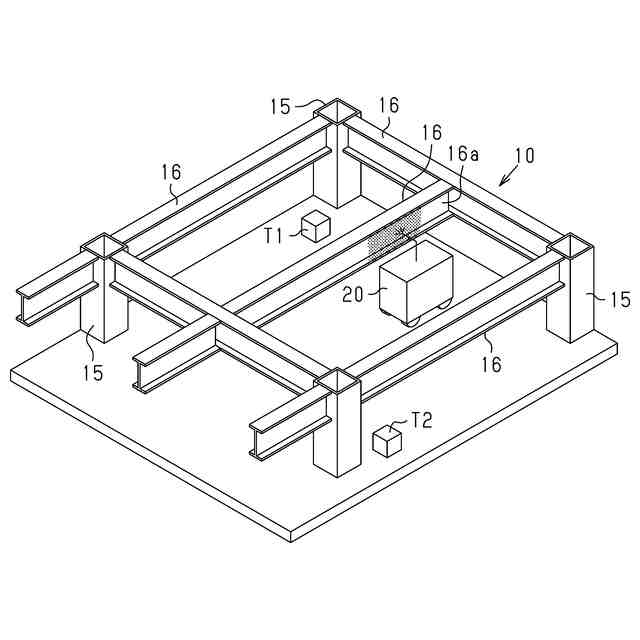
実施形態における吹付け装置の作業現場を説明する斜視図である。
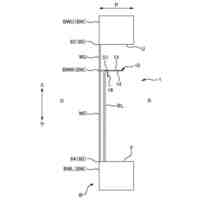
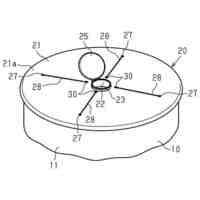
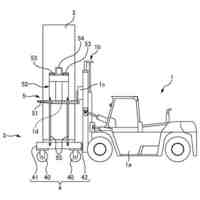
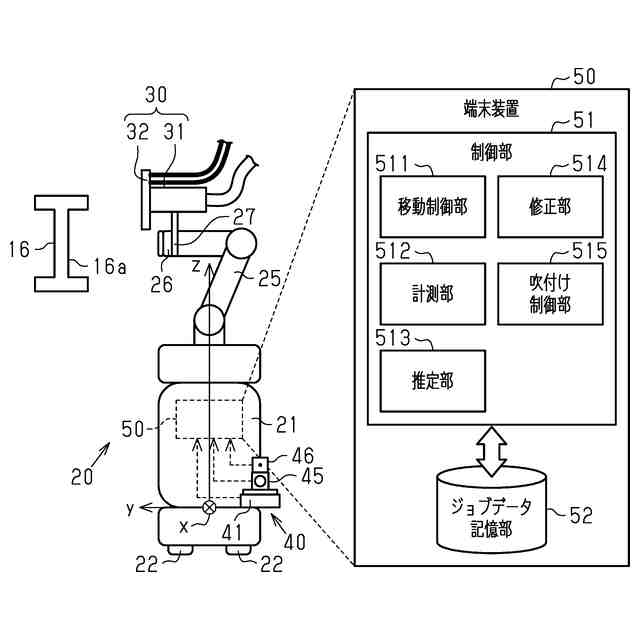
実施形態における吹付け装置の構成を説明する模式図である。
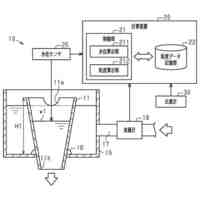
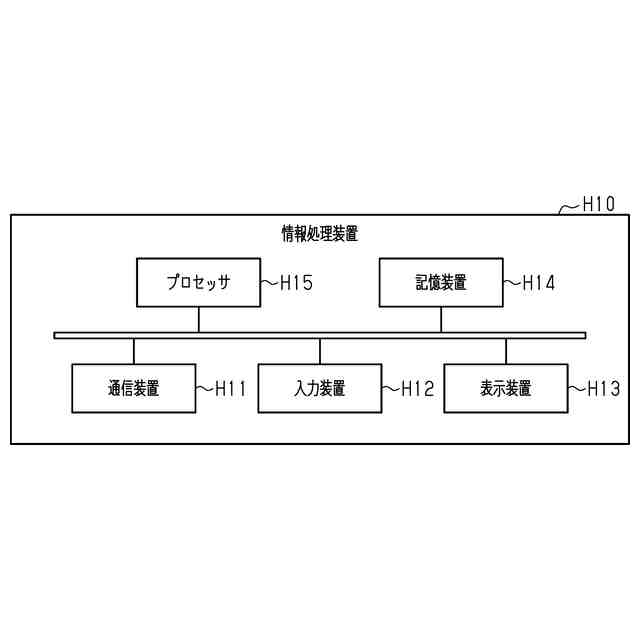
実施形態のハードウェア構成の説明図である。
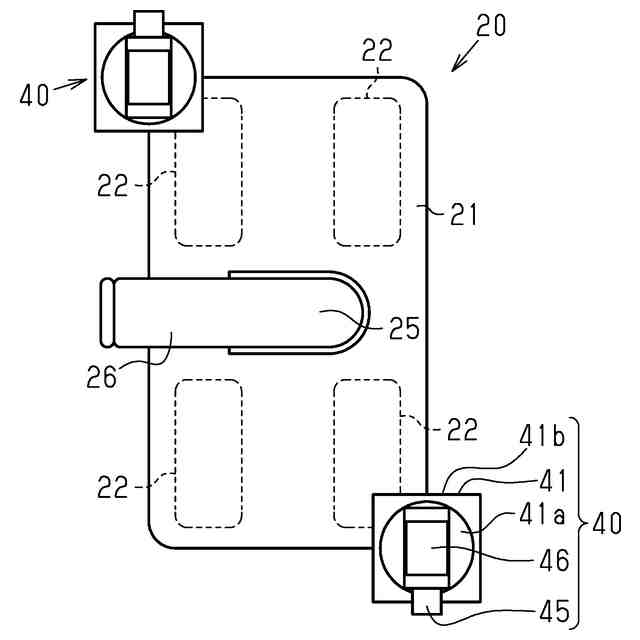
実施形態における吹付け装置の上から見た構成を説明する模式図である。
実施形態における吹付け装置の計測ユニットの斜視図である。
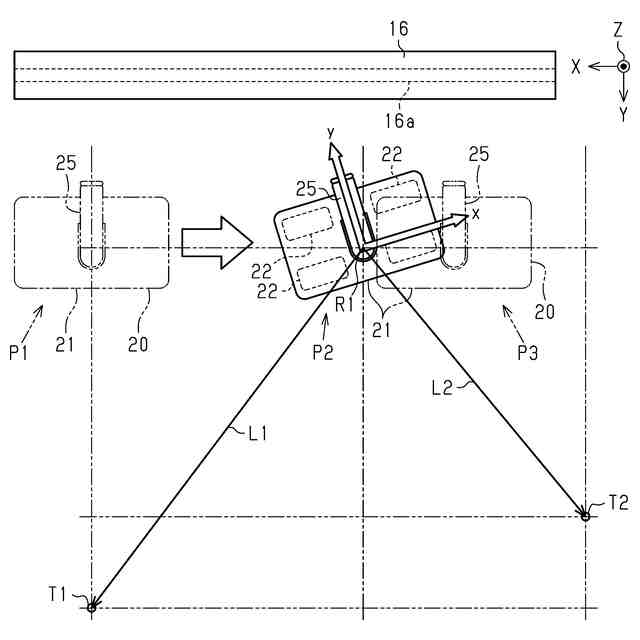
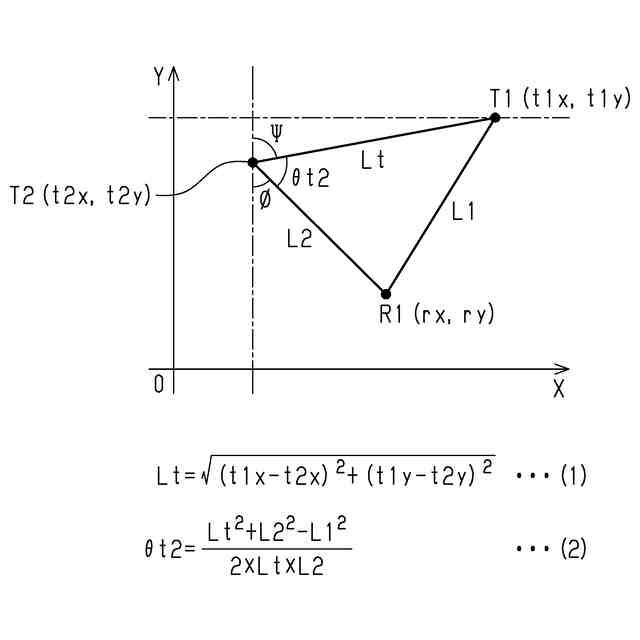
実施形態における吹付け装置の位置とターゲットの位置との関係を説明する説明図である。
実施形態における第1及び第2ターゲットと吹付け装置との位置及び角度の関係を示した説明図である。
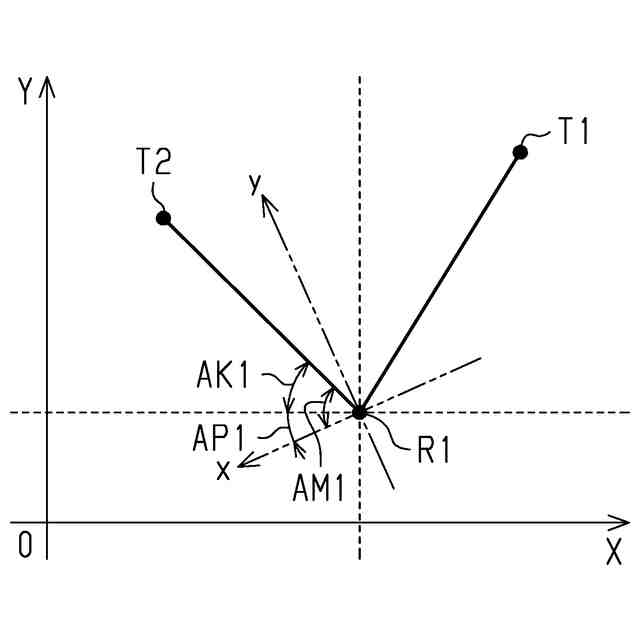
実施形態において吹付け装置の座標、現場座標、既知の角度、計測角度及び姿勢角度の関係を説明する説明図である。
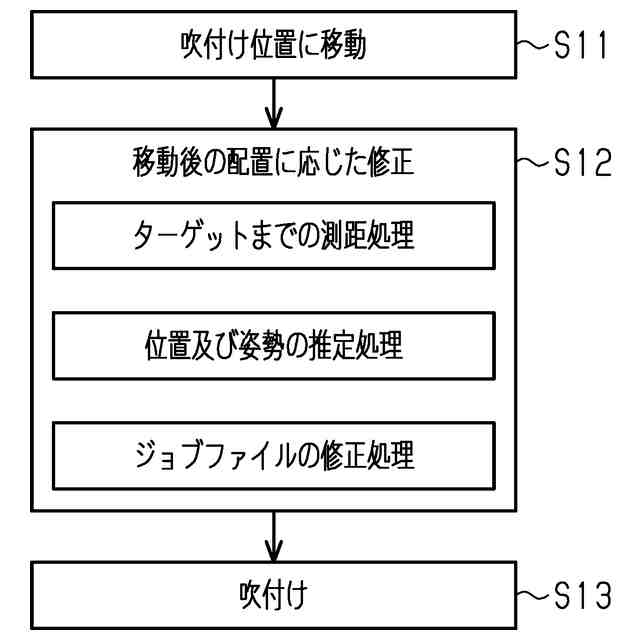
実施形態における移動後の吹付け工程の作業手順を示す流れ図である。
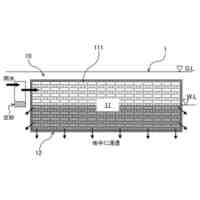
実施形態において吹付け処理を実行した状態を説明する説明図である。
実施形態の吹付け工程においてターゲットまでの測距処理、位置及び姿勢の推定処理及びジョブファイルの修正処理の処理手順を説明する流れ図である。
【発明を実施するための形態】
【0008】
以下、図1~図11を用いて、建設作業施工方法及び建設作業施工装置を具体化した実施形態を説明する。本実施形態では、建設作業として建設部材に対する仕上げ作業等の施工方法及び施工装置として、吹付け対象としての梁の施工対象面に吹付け材を吹付ける吹付け方法及び吹付け装置に適用して説明する。
【0009】
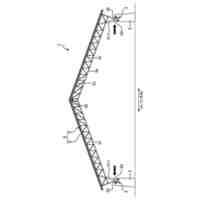
図1に示すように、本実施形態の吹付け装置20は、柱15とともに建物10を構成する梁16に対して、吹付け材を吹付ける。本実施形態では、梁16における吹付け装置20側のウェブが、施工対象面16aとなる。
【0010】
更に、建物10内には、離間するターゲットT1,T2を配置する。各ターゲットT1,T2は、吹付け装置20との距離をそれぞれ計測するために用いられ、それぞれ予め決められた位置(所定の座標位置)に配置される。
図2は、図1に示した吹付け装置20を拡大した模式図である。この吹付け装置20の本体部21には、端末装置50が内蔵されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大林組
建物
2か月前
株式会社大林組
反射板
9日前
株式会社大林組
扉装置
1か月前
株式会社大林組
採暖装置
2日前
株式会社大林組
制振建物
2か月前
株式会社大林組
採光装置
1か月前
株式会社大林組
内装構造
1か月前
株式会社大林組
仕上げ材
1か月前
株式会社大林組
仮屋根装置
1か月前
株式会社大林組
地下貯留槽
2か月前
株式会社大林組
土砂採取装置
1か月前
株式会社大林組
シーリング材
1か月前
株式会社大林組
柱梁接続構造
1か月前
株式会社大林組
屋根及び建物
1か月前
株式会社大林組
柱梁接続構造
1か月前
株式会社大林組
亀裂を補修する方法
1か月前
株式会社大林組
亀裂を補修する装置
1か月前
株式会社大林組
通風型温度調節装置
1か月前
株式会社大林組
水和反応物生成方法
2日前
株式会社大林組
亀裂を補修する装置
1か月前
株式会社大林組
筒状構造物の建設方法
1か月前
株式会社大林組
コンクリート打設方法
16日前
株式会社大林組
補強構造及び施工方法
19日前
株式会社大林組
柱基礎構造の設計方法
1か月前
株式会社大林組
壁のせん断強度評価方法
2日前
株式会社大林組
柱梁接続構造の設計方法
1か月前
株式会社大林組
搬送方法及び搬送補助装置
5日前
株式会社大林組
内装構造、及び、内装方法
1か月前
株式会社大林組
プレキャスト部材の製造方法
1か月前
株式会社大林組
構造物及び構造物の設計方法
1か月前
株式会社大林組
地盤改良材及び地盤改良工法
1か月前
株式会社大林組
プレキャスト部材の製造方法
1か月前
株式会社大林組
粘度計測方法及び粘度計測装置
5日前
株式会社大林組
グレア推定方法またはシステム
1か月前
株式会社大林組
セメント組成物の表面仕上方法
1か月前
株式会社大林組
方法、プログラム、及び制御装置
24日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ