TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024058844
公報種別
公開特許公報(A)
公開日
2024-04-30
出願番号
2022166205
出願日
2022-10-17
発明の名称
移動ロボットの制御方法
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B60B
19/00 20060101AFI20240422BHJP(車両一般)
要約
【課題】移動ロボットの振動を安価に低減できる移動ロボットの制御方法を実現する。
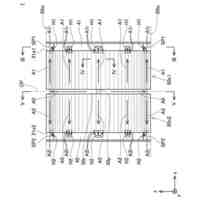
【解決手段】本開示の一態様に係る移動ロボット(1)の制御方法は、8つのバレル(6)を有するメカナムホイール(4)を右前側の車輪(3a)、左前側の車輪(3b)、右後側の車輪(3c)及び左後側の車輪(3d)として夫々1つ備える移動ロボットの制御方法であって、各々の車輪(3a、3b、3c、3d)の駆動トルクの時系列データを取得する工程と、駆動トルクの時系列データに基づいて、各々の車輪(3a、3b、3c、3d)の位相を算出し、各々の車輪(3a、3b、3c、3d)のバレル(6)の接地位置を推定する工程と、前後又は左右の車輪の接地位置の位相差が22.5°となるように、各々の車輪(3a、3b、3c、3d)の回転数を制御する工程と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
8つのバレルを有するメカナムホイールを右前側の車輪、左前側の車輪、右後側の車輪及び左後側の車輪として夫々1つ備える移動ロボットの制御方法であって、
各々の前記車輪の駆動トルクの時系列データを取得する工程と、
前記駆動トルクの時系列データに基づいて、前記各々の車輪の位相を算出し、前記各々の車輪のバレルの接地位置を推定する工程と、
前後又は左右の前記車輪の接地位置の位相差が22.5°となるように、前記各々の車輪の回転数を制御する工程と、
を備える、移動ロボットの制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、8つのバレルを有するメカナムホイールを右前側の車輪、左前側の車輪、右後側の車輪及び左後側の車輪として夫々1つ備える移動ロボットの制御方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
例えば、特許文献1の移動ロボットは、2つのメカナムホイールを組み合わせて1つの車輪を構成しており、1つの車輪を構成する一方のメカナムホイールに対して他方のメカナムホイールを15°進角又は遅角させることで、移動ロボットの振動の低減を図っている。
【先行技術文献】
【特許文献】
【0003】
特開2017-52417号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本出願人は、以下の課題を見出した。特許文献1の移動ロボットは、2つのメカナムホイールの配置を工夫することで、移動ロボットの振動の低減を図っているため、移動ロボットの部品点数が多く、その結果、移動ロボットの製造コストが嵩む課題を有する。
【0005】
本開示は、このような問題点に鑑みてなされたものであり、移動ロボットの振動を安価に低減できる移動ロボットの制御方法を実現する。
【課題を解決するための手段】
【0006】
本開示の一態様に係る移動ロボットの制御方法は、8つのバレルを有するメカナムホイールを右前側の車輪、左前側の車輪、右後側の車輪及び左後側の車輪として夫々1つ備える移動ロボットの制御方法であって、
各々の前記車輪の駆動トルクの時系列データを取得する工程と、
前記駆動トルクの時系列データに基づいて、前記各々の車輪の位相を算出し、前記各々の車輪のバレルの接地位置を推定する工程と、
前後又は左右の前記車輪の接地位置の位相差が22.5°となるように、前記各々の車輪の回転数を制御する工程と、
を備える。
【発明の効果】
【0007】
本開示によれば、移動ロボットの振動を安価に低減できる移動ロボットの制御方法を実現することができる。
【図面の簡単な説明】
【0008】
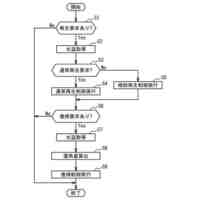
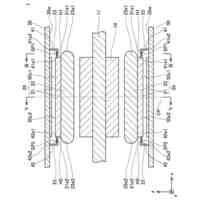
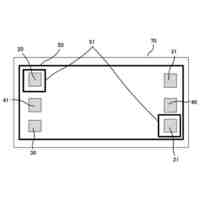
(a)は、実施の形態の移動ロボットを簡略的に示す図であり、(b)は、実施の形態の移動ロボットの制御系の構成を示すブロック図である。
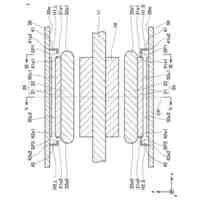
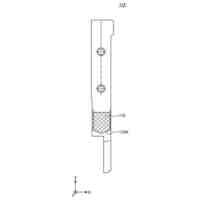
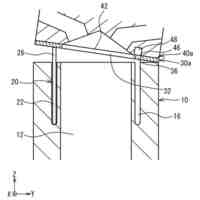
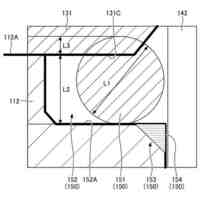
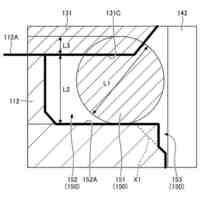
(a)は、実施の形態の移動ロボットの車輪の代表例を示す断面図であり、(b)は、実施の形態の移動ロボットの車輪の代表例を示す正面図であり、(c)は、車輪の駆動トルクの時系列データを示す図である。
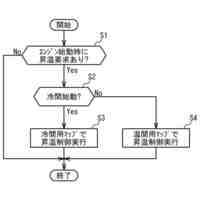
実施の形態の移動ロボットの制御方法の流れを示すフローチャート図である。
【発明を実施するための形態】
【0009】
以下、本開示を適用した具体的な実施の形態について、図面を参照しながら詳細に説明する。但し、本開示が以下の実施の形態に限定される訳ではない。また、説明を明確にするため、以下の記載及び図面は、適宜、簡略化されている。
【0010】
先ず、本実施の形態の移動ロボットの基本構成を説明する。図1(a)は、本実施の形態の移動ロボットを簡略的に示す図であり、図1(b)は、本実施の形態の移動ロボットの制御系の構成を示すブロック図である。図2(a)は、本実施の形態の移動ロボットの車輪の代表例を示す断面図であり、図2(b)は、本実施の形態の移動ロボットの車輪の代表例を示す正面図であり、図2(c)は、車輪の駆動トルクの時系列データを示す図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
モータ
今日
トヨタ自動車株式会社
モータ
今日
トヨタ自動車株式会社
モータ
今日
トヨタ自動車株式会社
ロータ
5日前
トヨタ自動車株式会社
剥離装置
1日前
トヨタ自動車株式会社
燃料電池
1日前
トヨタ自動車株式会社
管理装置
5日前
トヨタ自動車株式会社
設定装置
7日前
トヨタ自動車株式会社
管理方法
7日前
トヨタ自動車株式会社
エンジン
7日前
トヨタ自動車株式会社
管理装置
7日前
トヨタ自動車株式会社
検査方法
5日前
トヨタ自動車株式会社
制御装置
7日前
トヨタ自動車株式会社
燃料電池
7日前
トヨタ自動車株式会社
蓄電セル
5日前
トヨタ自動車株式会社
駆動装置
6日前
トヨタ自動車株式会社
蓄電セル
5日前
トヨタ自動車株式会社
金型構造
今日
トヨタ自動車株式会社
制御装置
5日前
トヨタ自動車株式会社
固体電池
今日
トヨタ自動車株式会社
蓄電セル
今日
トヨタ自動車株式会社
出力装置
5日前
トヨタ自動車株式会社
出力装置
5日前
トヨタ自動車株式会社
成膜装置
5日前
トヨタ自動車株式会社
水電解セル
7日前
トヨタ自動車株式会社
積層ハンド
1日前
トヨタ自動車株式会社
シール構造
1日前
トヨタ自動車株式会社
シール構造
1日前
トヨタ自動車株式会社
電極構造体
2日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ