TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025139974
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024039086
出願日
2024-03-13
発明の名称
車載制御装置、検証システム
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人ゆうあい特許事務所
主分類
G08G
1/00 20060101AFI20250919BHJP(信号)
要約
【課題】車両の実動作に影響するような監視センサの機能に関わるアプリケーションプログラムの動作を検証可能な車載制御装置および検証システムを提供する。
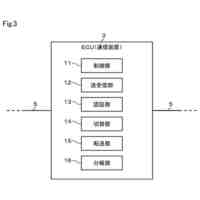
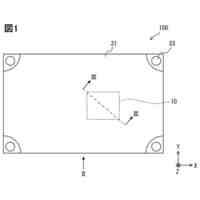
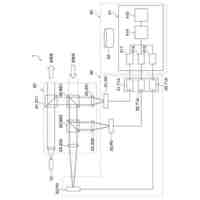
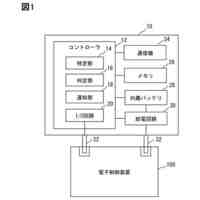
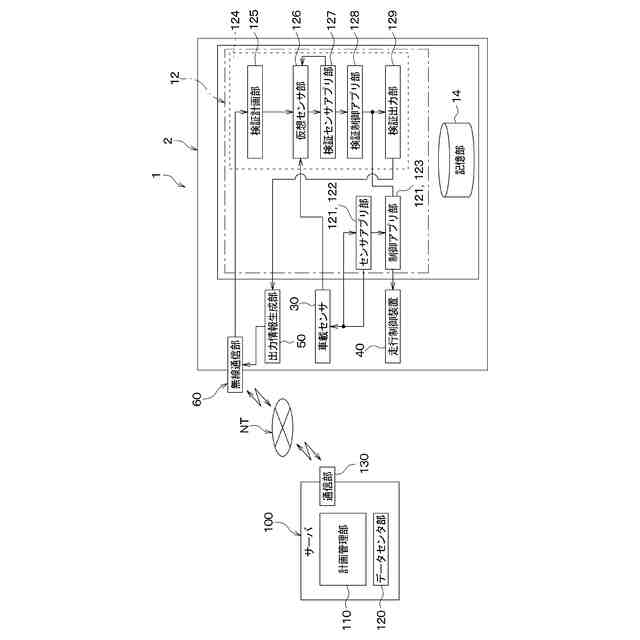
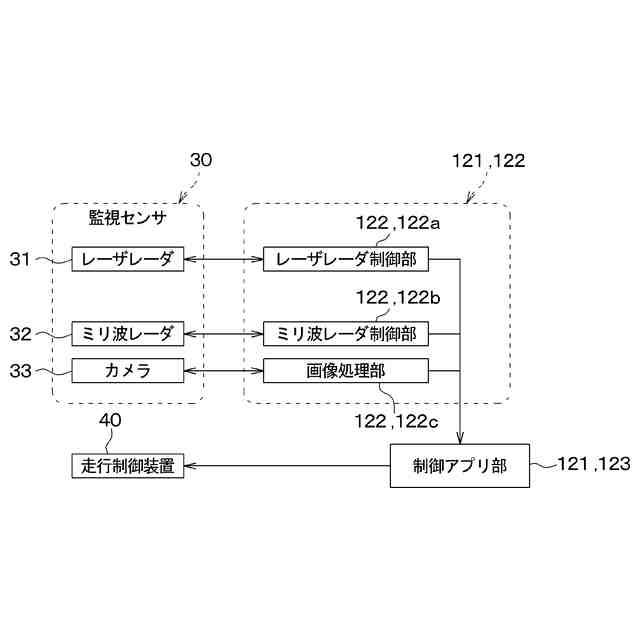
【解決手段】車載制御装置10は、監視センサを制御するセンサ制御信号を出力する基本アプリ、基本アプリとは異なる検証アプリが記憶された記憶部14を備える。車載制御装置10は、基本アプリおよび検証アプリを実行する制御部12を備える。検証アプリは、車両2の走行状態および走行環境の少なくとも一方に関する情報を含む車両関連情報および監視センサのセンサ出力を入力として、監視センサを模した仮想センサの動作を制御する仮想制御信号を設定する。制御部12は、仮想制御信号に応じた仮想センサの動作結果に基づいて検証アプリの動作を検証する。
【選択図】図1
特許請求の範囲
【請求項1】
車両(2)に搭載される車載制御装置であって、
前記車両の周囲を監視する監視センサ(30)を制御するセンサ制御信号を前記監視センサへ出力する基本アプリケーションプログラム、前記基本アプリケーションプログラムとは異なる検証アプリケーションプログラムが記憶された記憶部(14)と、
前記基本アプリケーションプログラムおよび前記検証アプリケーションプログラムを実行する制御部(12)と、を備え、
前記検証アプリケーションプログラムは、前記車両の走行状態および走行環境の少なくとも一方に関する情報を含む車両関連情報および前記監視センサのセンサ出力を入力として、前記監視センサを模した仮想センサの動作を制御する仮想制御信号を設定し、
前記制御部は、前記仮想制御信号に応じた前記仮想センサの動作結果に基づいて前記検証アプリケーションプログラムの動作を検証する、車載制御装置。
続きを表示(約 2,300 文字)
【請求項2】
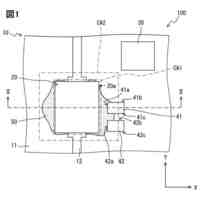
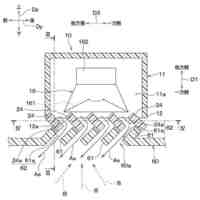
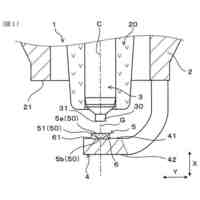
前記監視センサは、前記車両の周囲に電磁波を照射して前記車両の周囲にある物体との距離を含む測距点データを生成する測距センサであり、
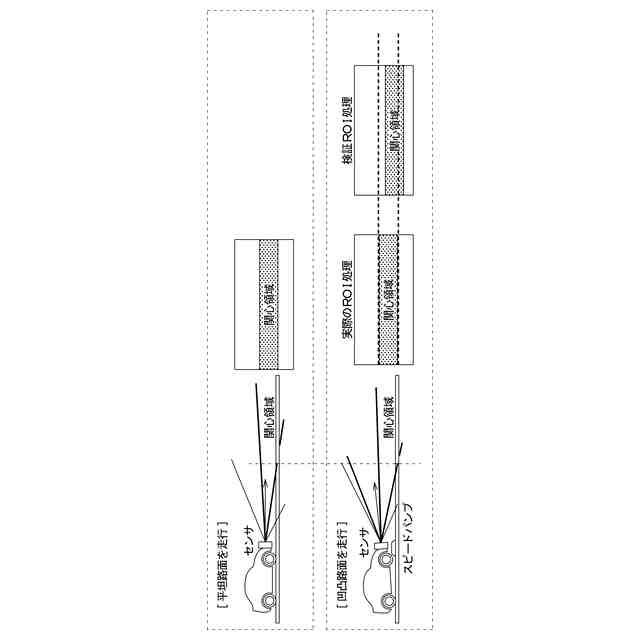
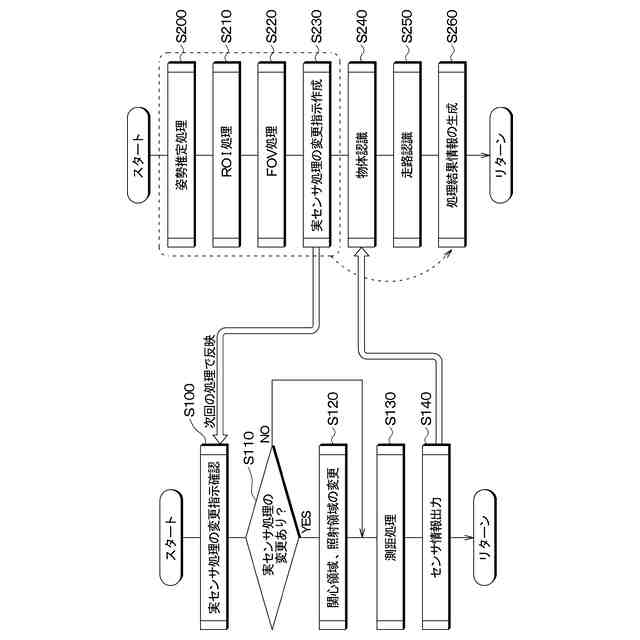
前記基本アプリケーションプログラムには、前記測距センサにおける前記電磁波の照射範囲の一部に分解能を高める関心領域を指定する信号を前記センサ制御信号として設定するROI処理が含まれ、
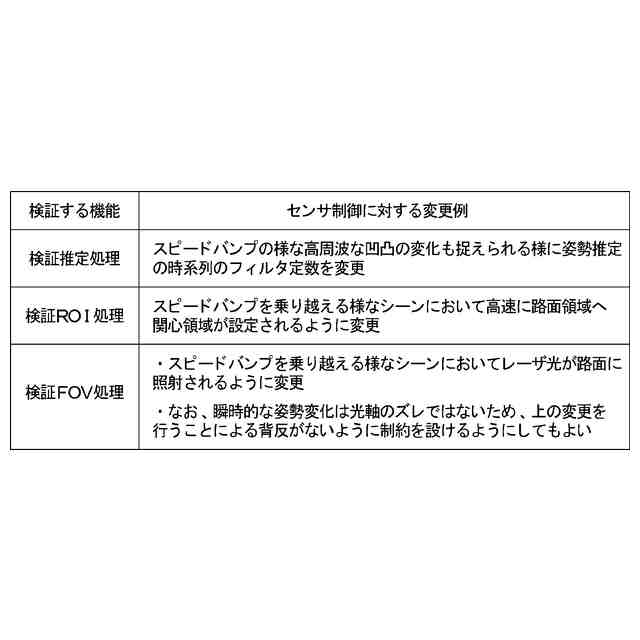
前記検証アプリケーションプログラムには、前記ROI処理とは処理内容の一部が異なる検証ROI処理が含まれ、
前記検証ROI処理によって設定される前記関心領域を検証関心領域としたとき、
前記制御部は、前記測距センサが出力する前記測距点データおよび前記車両関連情報に基づいて、前記検証関心領域を指定した際の前記測距センサが出力する前記測距点データを推測し、推測した前記測距点データを前記仮想センサの動作結果として出力する、請求項1に記載の車載制御装置。
【請求項3】
前記基本アプリケーションプログラムには、前記測距センサにおける前記電磁波の照射範囲を指定する信号を前記センサ制御信号として設定するFOV処理が含まれ、
前記検証アプリケーションプログラムには、前記FOV処理とは処理内容の一部が異なる検証FOV処理が含まれ、
前記検証FOV処理によって設定される前記電磁波の照射範囲を検証照射範囲としたとき、
前記制御部は、前記測距センサが出力する前記測距点データおよび前記車両関連情報に基づいて、前記検証照射範囲を指定した際の前記測距センサが出力する前記測距点データを推測し、推測した前記測距点データを前記仮想センサの動作結果として出力する、請求項2に記載の車載制御装置。
【請求項4】
前記基本アプリケーションプログラムには、前記測距センサの姿勢を推定する姿勢推定処理が含まれ、
前記検証アプリケーションプログラムは、前記測距センサの姿勢が変化した際の処理内容が前記基本アプリケーションプログラムにおける前記測距センサの姿勢の推定処理とは異なる検証推定処理が含まれ、
前記制御部は、前記測距センサが出力する前記測距点データおよび前記検証推定処理の推定結果に基づいて、前記測距センサが出力する前記測距点データを推測し、推測した前記測距点データを前記仮想センサの動作結果として出力する、請求項2または3に記載の車載制御装置。
【請求項5】
前記監視センサは、前記車両の周囲に電磁波を照射して前記車両の周囲にある物体との距離を含む測距点データを生成する測距センサであり、
前記基本アプリケーションプログラムには、前記測距センサにおける前記電磁波の照射範囲を指定する信号を前記センサ制御信号として設定するFOV処理が含まれ、
前記検証アプリケーションプログラムには、前記FOV処理とは処理内容の一部が異なる検証FOV処理が含まれ、
前記検証FOV処理によって設定される前記電磁波の照射範囲を検証照射範囲としたとき、
前記制御部は、前記測距センサが出力する前記測距点データおよび前記車両関連情報に基づいて前記検証照射範囲を指定した際の前記測距センサが出力する前記測距点データを推測し、推測した前記測距点データを前記仮想センサの動作結果として出力する、請求項1に記載の車載制御装置。
【請求項6】
前記制御部は、前記監視センサが出力する前記測距点データを時系列で積算した積算データに基づいて前記車両の周囲の三次元地図を生成し、生成した前記三次元地図を用いて、前記仮想センサが出力する前記測距点データを求める、請求項2または5に記載の車載制御装置。
【請求項7】
前記制御部は、前記測距センサでの検出信号の信号強度および前記測距センサで計測された測定距離との関係を規定したライダー方程式を用いて、前記仮想センサが出力する前記測距点データを補正する、請求項6に記載の車載制御装置。
【請求項8】
前記制御部は、前記仮想センサの動作結果と前記監視センサの動作結果とを比較することで、前記検証アプリケーションプログラムの動作を検証する、請求項1に記載の車載制御装置。
【請求項9】
前記制御部が検証した前記検証アプリケーションプログラムの動作の検証結果は、通信部(60)によって車外のサーバ(100)へ出力される、請求項1に記載の車載制御装置。
【請求項10】
検証システムであって、
車両(2)に搭載される車載制御装置(10)と、
前記車載制御装置と通信可能なサーバ(100)と、を備え、
前記車載制御装置は、
前記車両の周囲を監視する監視センサ(30)を制御するセンサ制御信号を前記監視センサへ出力する基本アプリケーションプログラム、前記基本アプリケーションプログラムとは異なる検証アプリケーションプログラムが記憶された記憶部(14)と、
前記基本アプリケーションプログラムおよび前記検証アプリケーションプログラムを実行する制御部(12)と、を含み、
前記検証アプリケーションプログラムは、前記車両の走行状態および走行環境の少なくとも一方に関する情報を含む車両関連情報および前記監視センサのセンサ出力を入力として、前記監視センサを模した仮想センサの動作を制御する仮想制御信号を設定し、
前記制御部は、前記仮想制御信号に応じた前記仮想センサの動作結果に基づいて前記検証アプリケーションプログラムの動作を検証する、検証システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車載制御装置、当該車載制御装置を含む検証システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、車両走行制御に関する基本アプリケーションプログラムとは異なる検証アプリケーションプログラムを運転中に実行し、運転中に得られる環境データを用いて検証アプリケーションプログラムの動作を検証する技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
国際公開第2021/22986号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の検証アプリケーションプログラムの動作検証は、車両の走行中に実施されることから、車両の走行制御の実動作に影響しない機能に制限され、車両の走行制御の実動作に影響する機能については対応できない。例えば、特許文献1に記載の技術では、車両の走行制御の実動作に影響するような車両周辺の監視センサの機能について、検証アプリケーションプログラムの動作を検証することができない。
【0005】
本開示は、車両の実動作に影響するような監視センサの機能に関わるアプリケーションプログラムの動作を検証可能な車載制御装置および検証システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、
車両(2)に搭載される車載制御装置であって、
車両の周囲を監視する監視センサ(30)を制御するセンサ制御信号を監視センサへ出力する基本アプリケーションプログラム、基本アプリケーションプログラムとは異なる検証アプリケーションプログラムが記憶された記憶部(14)と、
基本アプリケーションプログラムおよび検証アプリケーションプログラムを実行する制御部(12)と、を備え、
検証アプリケーションプログラムは、車両の走行状態および走行環境の少なくとも一方に関する情報を含む車両関連情報および監視センサのセンサ出力を入力として、監視センサを模した仮想センサの動作を制御する仮想制御信号を設定し、
制御部は、仮想制御信号に応じた仮想センサの動作結果に基づいて検証アプリケーションプログラムの動作を検証する。
【0007】
請求項10に記載の発明は、
検証システムであって、
車両(2)に搭載される車載制御装置(10)と、
車載制御装置と通信可能なサーバ(100)と、を備え、
車載制御装置は、
車両の周囲を監視する監視センサ(30)を制御するセンサ制御信号を監視センサへ出力する基本アプリケーションプログラム、基本アプリケーションプログラムとは異なる検証アプリケーションプログラムが記憶された記憶部(14)と、
基本アプリケーションプログラムおよび検証アプリケーションプログラムを実行する制御部(12)と、を含み、
検証アプリケーションプログラムは、車両の走行状態および走行環境の少なくとも一方に関する情報を含む車両関連情報および監視センサのセンサ出力を入力として、監視センサを模した仮想センサの動作を制御する仮想制御信号を設定し、
制御部は、仮想制御信号に応じた前記仮想センサの動作結果に基づいて検証アプリケーションプログラムの動作を検証する。
【0008】
これらのように、監視センサを模した仮想センサの動作結果に基づいて検証アプリケーションプログラムの動作を検証するようになっていれば、検証アプリケーションプログラムの動作検証が車両の実動作に影響することはない。
【0009】
したがって、本開示の車載制御装置および検証システムによれば、車両の実動作に影響するような監視センサの機能に関わるアプリケーションプログラムの動作を検証することができる。
【0010】
なお、各構成要素等に付された括弧付きの参照符号は、その構成要素等と後述する実施形態に記載の具体的な構成要素等との対応関係の一例を示すものである。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソー
接合体
13日前
株式会社デンソー
携帯機
1か月前
株式会社デンソー
通信装置
29日前
株式会社デンソー
光学部材
24日前
株式会社デンソー
電子機器
1か月前
株式会社デンソー
電子装置
3日前
株式会社デンソーエレクトロニクス
発音装置
3日前
株式会社デンソーエレクトロニクス
発音装置
21日前
株式会社デンソー
平滑回路
23日前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
駆動装置
1か月前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
ステータ
1か月前
株式会社デンソー
駆動装置
29日前
株式会社デンソー
送電装置
1か月前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
ステータ
1か月前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
測距装置
1か月前
株式会社デンソー
圧電素子
1か月前
株式会社デンソーウェーブ
携帯端末
1か月前
株式会社デンソー
駆動装置
1か月前
株式会社デンソー
太陽電池
15日前
株式会社デンソー
光学部材
2か月前
株式会社デンソー
通信装置
2か月前
株式会社デンソー
ステータ
14日前
株式会社デンソー
ステータ
14日前
株式会社デンソー
書込装置
1か月前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
センサ素子
29日前
株式会社デンソー
レーダ装置
1か月前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
熱音響装置
1か月前
株式会社デンソー
点火プラグ
1か月前
株式会社デンソー
回転体装置
27日前
株式会社デンソー
半導体装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ