TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025136738
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024035552
出願日
2024-03-08
発明の名称
判定装置、判定方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
主分類
B60W
40/04 20060101AFI20250911BHJP(車両一般)
要約
【課題】自車両の周辺の道路区画線と周辺車両の状況に応じて、より適切に区画線の正否を判定すること。
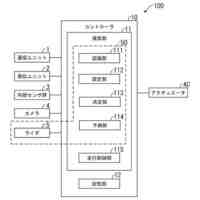
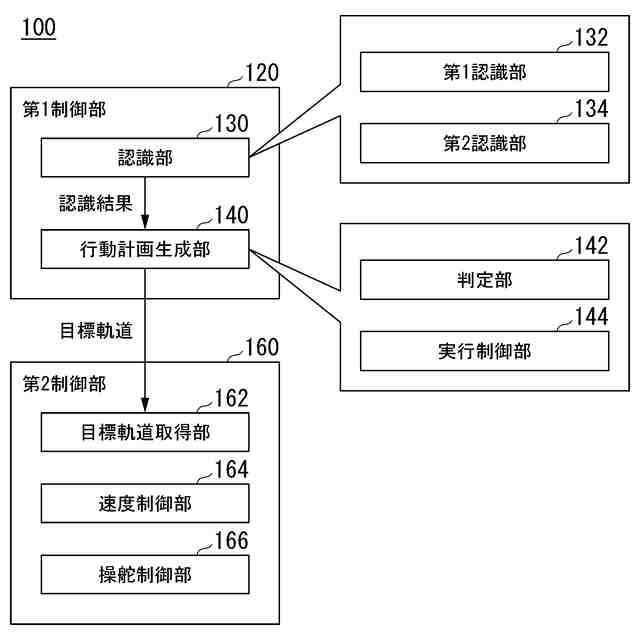
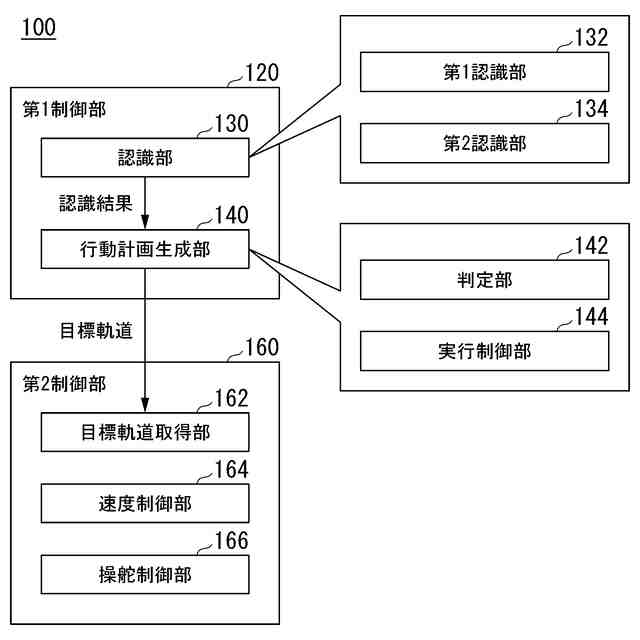
【解決手段】実施形態の判定装置は、自車両の周辺状況を検知した検知デバイスの出力に基づいて、前記自車両の走行車線を区画する第1区画線および前記自車両の周辺に存在する周辺車両を含む周辺状況を認識する第1認識部と、前記自車両の位置情報に基づいて、地図情報から前記自車両の周辺の車線を区画する第2区画線を認識する第2認識部と、前記第1区画線と前記第2区画線とが乖離するか否かを判定する判定部と、を備え、前記判定部は、前記第1認識部により前記周辺車両が認識された場合と、前記周辺車両が認識されなかった場合とで、前記第1区画線と前記第2区画線とが乖離するか否かの判定の態様を異ならせる。
【選択図】図2
特許請求の範囲
【請求項1】
自車両の周辺状況を検知した検知デバイスの出力に基づいて、前記自車両の走行車線を区画する第1区画線および前記自車両の周辺に存在する周辺車両を含む周辺状況を認識する第1認識部と、
前記自車両の位置情報に基づいて、地図情報から前記自車両の周辺の車線を区画する第2区画線を認識する第2認識部と、
前記第1区画線と前記第2区画線とが乖離するか否かを判定する判定部と、を備え、
前記判定部は、前記第1認識部により前記周辺車両が認識された場合と、前記周辺車両が認識されなかった場合とで、前記第1区画線と前記第2区画線とが乖離するか否かの判定の態様を異ならせる、
判定装置。
続きを表示(約 1,200 文字)
【請求項2】
前記周辺車両は、前記自車両が走行する車線に隣接する隣接車線を走行し、且つ前記自車両から所定距離以内に存在する隣接車両を含み、
前記判定部は、前記周辺車両に隣接車両が含まれる場合に、前記判定の態様を異ならせる、
請求項1に記載の判定装置。
【請求項3】
前記判定部は、前記周辺車両が認識された場合は、認識されなかった場合よりも前記第1区画線と前記第2区画線とが乖離していると判定され易くする、
請求項1に記載の判定装置。
【請求項4】
前記判定部は、前記第1認識部により前記周辺車両が認識された場合に、認識された周辺車両のうち前記隣接車両以外であって、且つ前記隣接車両よりも進行方向の前方に存在する周辺車両の走行軌跡と、前記第2区画線とに基づいて前記第1区画線と前記第2区画線とが乖離するか否かを判定する、
請求項2に記載の判定装置。
【請求項5】
前記判定部は、前記周辺車両の走行軌跡から仮想の前記第1区画線を設定し、設定した仮想第1区画線と前記第2区画線とが乖離するか否か否かを判定する、
請求項4に記載の判定装置。
【請求項6】
前記判定部は、前記第1認識部により前記周辺車両が認識された場合において、
前記自車両から所定距離未満の位置では、前記第1区画線と前記第2区画線とが乖離するか否かを判定し、
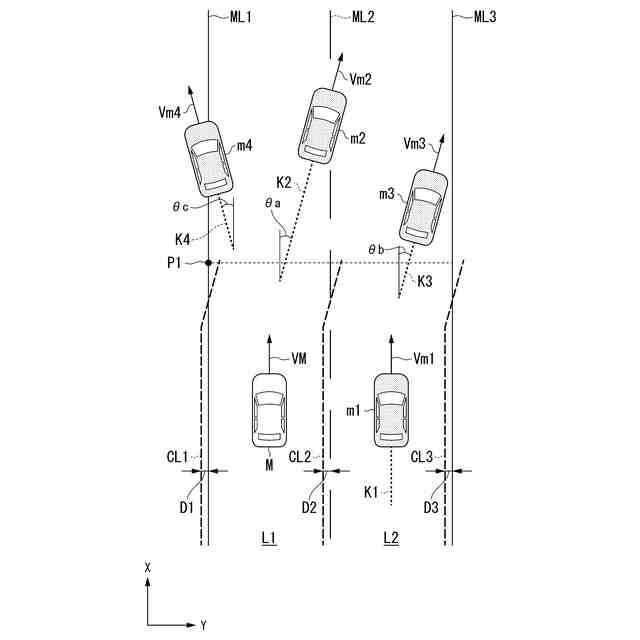
前記自車両から所定距離以上の位置では、前記周辺車両のうち隣接車両以外であって、且つ前記隣接車両よりも前方の周辺車両の走行軌跡と前記第2区画線とが乖離するか否かを判定する、
請求項2に記載の判定装置。
【請求項7】
前記判定部は、前記自車両から所定距離以上の位置では、前記仮想第1区画線と前記第2区画線とが乖離するか否かを判定する、
請求項5に記載の判定装置。
【請求項8】
前記判定部は、前記周辺車両を用いて前記第1区画線と前記第2区画線とが乖離するか否かを判定した後に、前記第1認識部により前記隣接車両が認識されなくなった場合に、前記乖離するか否かの判定結果をリセットする、
請求項2に記載の判定装置。
【請求項9】
前記判定部は、前記第2区画線の延伸方向に対する前記周辺車両の走行軌跡の乖離角度が所定角度以上の走行軌跡を取得し、取得した走行軌跡と前記第2区画線とが乖離するか否かを判定する、
請求項4に記載の判定装置。
【請求項10】
前記判定部は、前記第2区画線の延伸方向に対する前記周辺車両の走行軌跡の乖離方向を取得し、乖離方向が同一である数が多い方の走行軌跡と前記第2区画線とが乖離するか否かを判定する、
請求項4に記載の判定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、判定装置、判定方法、およびプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、交通参加者の中でも脆弱な立場にある人々にも配慮した持続可能な輸送システムへのアクセスを提供する取り組みが活発化している。この実現に向けて自動運転技術に関する研究開発を通して交通の安全性や利便性をより一層改善する研究開発に注力している。これに関連して、従来では、カメラ画像に示される道路区画線(カメラ区画線)と地図情報に示される道路区画線(地図区画線)との間に乖離が存在すると判定された場合に、周辺に存在する他車両の走行軌跡とカメラ区画線との間の平行度に基づいて車両の運転モードを制御する技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2023-148405号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
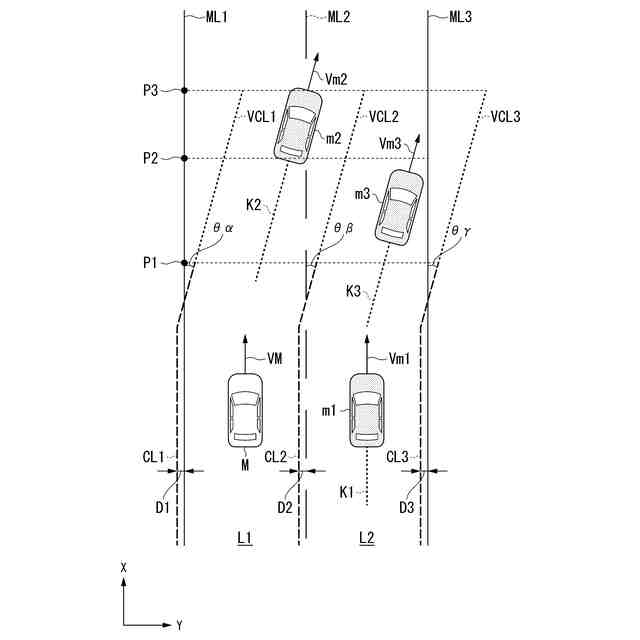
ところで、従来の自動運転技術において、自車両の隣接車線を自車両と並走して走行する隣接車両の走行軌跡を用いた場合には、自車両の前方を走行する前走車両の走行軌跡と比較して軌跡が変化するタイミングが遅くなるため、カメラ区画線が正しいか否かの正否判定を行うタイミングが遅くなってしまう可能性があるという課題があった。また、従来では、遠距離でカメラ区画線が認識できない場合もあるため、遠距離において、カメラ区画線と他車両の軌跡を比較することができず、同様に正否判定が遅れる可能性があるという課題があった。
【0005】
本願は上記課題の解決のため、自車両の周辺の道路区画線と周辺車両の状況に応じて、より適切に区画線の正否を判定することができる判定装置、判定方法、およびプログラムを提供することを目的の一つとする。そして、延いては持続可能な輸送システムの発展に寄与するものである。
【課題を解決するための手段】
【0006】
この発明に係る判定装置、判定方法、およびプログラムは、以下の構成を採用した。
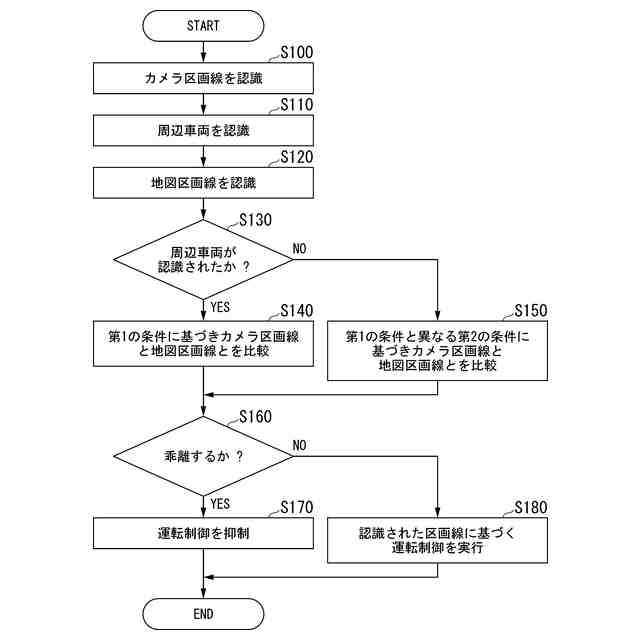
(1):この発明の一態様に係る判定装置は、自車両の周辺状況を検知した検知デバイスの出力に基づいて、前記自車両の走行車線を区画する第1区画線および前記自車両の周辺に存在する周辺車両を含む周辺状況を認識する第1認識部と、前記自車両の位置情報に基づいて、地図情報から前記自車両の周辺の車線を区画する第2区画線を認識する第2認識部と、前記第1区画線と前記第2区画線とが乖離するか否かを判定する判定部と、を備え、前記判定部は、前記第1認識部により前記周辺車両が認識された場合と、前記周辺車両が認識されなかった場合とで、前記第1区画線と前記第2区画線とが乖離するか否かの判定の態様を異ならせる、判定装置である。
【0007】
(2):上記(1)の態様において、前記周辺車両は、前記自車両が走行する車線に隣接する隣接車線を走行し、且つ前記自車両から所定距離以内に存在する隣接車両を含み、前記判定部は、前記周辺車両に隣接車両が含まれる場合に、前記判定の態様を異ならせるものである。
【0008】
(3):上記(1)の態様において、前記判定部は、前記周辺車両が認識された場合は、認識されなかった場合よりも前記第1区画線と前記第2区画線とが乖離していると判定され易くするものである。
【0009】
(4):上記(2)の態様において、前記判定部は、前記第1認識部により前記周辺車両が認識された場合に、認識された周辺車両のうち前記隣接車両以外であって、且つ前記隣接車両よりも進行方向の前方に存在する周辺車両の走行軌跡と、前記第2区画線とに基づいて前記第1区画線と前記第2区画線とが乖離するか否かを判定するものである。
【0010】
(5):上記(4)の態様において、前記判定部は、前記周辺車両の走行軌跡から仮想の前記第1区画線を設定し、設定した仮想第1区画線と前記第2区画線とが乖離するか否か否かを判定するものである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
22日前
本田技研工業株式会社
電解装置
5日前
本田技研工業株式会社
ロボット
20日前
本田技研工業株式会社
回転機械
21日前
本田技研工業株式会社
搬送装置
1か月前
本田技研工業株式会社
触媒インク
22日前
本田技研工業株式会社
鞍乗型車両
4日前
本田技研工業株式会社
触媒インク
22日前
本田技研工業株式会社
管理システム
29日前
本田技研工業株式会社
車両制御装置
6日前
本田技研工業株式会社
電力変換装置
1か月前
本田技研工業株式会社
鞍乗り型車両
12日前
本田技研工業株式会社
鞍乗り型車両
26日前
本田技研工業株式会社
物体検出装置
1か月前
本田技研工業株式会社
鞍乗り型車両
14日前
本田技研工業株式会社
位置推定装置
28日前
本田技研工業株式会社
作業システム
21日前
本田技研工業株式会社
電力変換装置
29日前
本田技研工業株式会社
車両制御装置
28日前
本田技研工業株式会社
潤滑システム
4日前
本田技研工業株式会社
導体接合方法
28日前
本田技研工業株式会社
鞍乗り型車両
21日前
本田技研工業株式会社
鞍乗り型車両
21日前
本田技研工業株式会社
動力伝達装置
19日前
本田技研工業株式会社
クラッチ装置
13日前
本田技研工業株式会社
電力変換装置
1か月前
本田技研工業株式会社
電流検出装置
1か月前
本田技研工業株式会社
薄板搬送装置
1か月前
本田技研工業株式会社
固体二次電池
4日前
本田技研工業株式会社
外界認識装置
1か月前
本田技研工業株式会社
物体検出装置
1か月前
本田技研工業株式会社
車両制御装置
4日前
本田技研工業株式会社
電流検出装置
1か月前
本田技研工業株式会社
水電解システム
22日前
本田技研工業株式会社
水電解システム
18日前
本田技研工業株式会社
非接触受電装置
20日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ