TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025135678
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024033566
出願日
2024-03-06
発明の名称
力触覚情報伝達装置
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
主分類
G06F
3/01 20060101AFI20250911BHJP(計算;計数)
要約
【課題】力触覚情報伝達を簡単な機構で実現する。
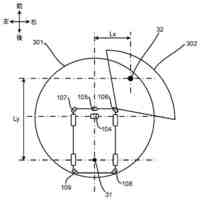
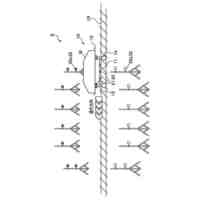
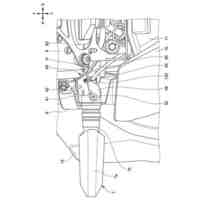
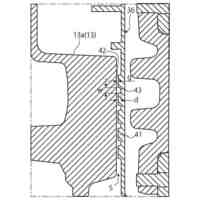
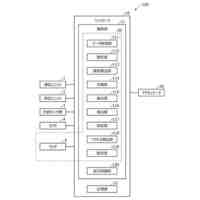
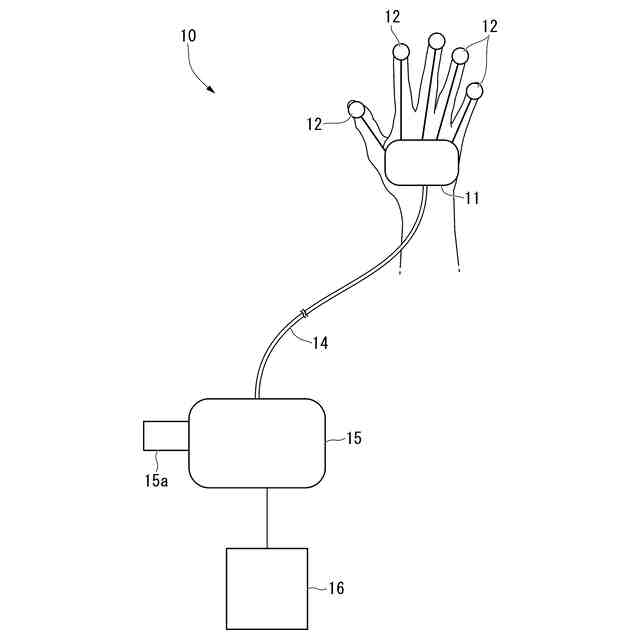
【解決手段】力触覚情報伝達装置(10)は、ユーザに装着する装着手段(11)と、装着手段に接続され、受信した力触覚情報をユーザに伝達する力触覚情報伝達手段(12)と、力触覚情報伝達手段(12)を駆動する駆動源(13)と、駆動源(13)から減速機を介さずに駆動力を力触覚情報伝達手段(12)に伝達する駆動力伝達手段(14)と、を有し、駆動源(13)を搭載する駆動源部(15)は、装着手段(11)と駆動力伝達手段(14)のみで接続している。
【選択図】図1
特許請求の範囲
【請求項1】
ユーザに装着する装着手段と、
前記装着手段に接続され、受信した力触覚情報を前記ユーザに伝達する力触覚情報伝達手段と、
前記力触覚情報伝達手段を駆動する駆動源と、
前記駆動源から減速機を介さずに駆動力を前記力触覚情報伝達手段に伝達する駆動力伝達手段と、
を有し、
前記駆動源を搭載する駆動源部は、前記装着手段と前記駆動力伝達手段のみで接続している、
ことを特徴とする力触覚情報伝達装置。
続きを表示(約 610 文字)
【請求項2】
前記装着手段は、前記ユーザの手に装着され、
前記力触覚情報伝達手段は、前記ユーザの複数の指にそれぞれ対応して設けられ、
前記力触覚情報伝達手段は、前記力触覚情報として遠隔操作する際の感覚を前記ユーザにフィードバックする、
ことを特徴とする請求項1記載の力触覚情報伝達装置。
【請求項3】
前記力触覚情報伝達手段は、前記ユーザの複数の指にそれぞれ2以上設けられる、
ことを特徴とする請求項2記載の力触覚情報伝達装置。
【請求項4】
前記力触覚情報伝達手段は、それぞれ前記駆動力伝達手段を介して前記駆動源に接続される、
ことを特徴とする請求項2記載の力触覚情報伝達装置。
【請求項5】
前記駆動源部には、全ての前記駆動源が収納される、
ことを特徴とする請求項4記載の力触覚情報伝達装置。
【請求項6】
前記駆動力伝達手段が、フレキシブルシャフトである、
ことを特徴とする請求項1記載の力触覚情報伝達装置。
【請求項7】
前記駆動源は、ダイレクトドライブモータである、
ことを特徴とする請求項1記載の力触覚情報伝達装置。
【請求項8】
前記駆動源部を固定する固定部が備えられる、
ことを特徴とする請求項1記載の力触覚情報伝達装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、力触覚情報伝達装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
アバターロボットの遠隔操作や、仮想現実(バーチャルリアリティ)等の分野では、対象者に力覚や触覚を提示するための力触覚提示装置が使用される。
力触覚提示装置は、掴んだモノの感触や形状を伝えるために、操作者に対して多指の力覚提示をおこなう。
【0003】
特許文献1には、グローブにモータが備えられた触覚提示可能な技術が提示されている。特許文献2には、モータ221aを備えて触覚発生部21およびリンクモータ222を備えた力覚発生部22が提示されている。特許文献3には、減速機72が連結された回転式モータ71を有する力覚提示するワイヤー駆動機構および減速機105bとモータ105aを備えた触覚提示部が提示されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-149890号公報
特許第4039111号公報
特許第4403474号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記従来技術では、いずれも、力覚提示機構と触覚提示機構とが別々の機構として示されている。このため、機構全体の重量が増大するという問題があった。
また、上記従来技術では、いずれも、装着するグローブにモータが設けられているため、装着重量が大きくなるという問題があった。
さらに、特許文献3に記載されるように、減速機を介して力覚提示をおこなうため、バックラッシあるいは摩擦により提示情報の正確性が低下するとともに、微小振動のような情報を伝達することができず、力覚提示機構を触覚提示機構として用いることができないという問題があった。
力覚情報と触覚情報とを同時に提示できない従来技術には改善の余地がある。
【0006】
本発明は、上記の事情に鑑みてなされたもので、対象物の手触りや細かな段差を伝えるために操作者に対して多指の触覚提示を実現可能で、装着部は小型軽量であることができ、力覚情報と触覚情報とを同時に提示できる力触覚情報伝達装置を提供するという目的を達成しようとするものである。
【課題を解決するための手段】
【0007】
本発明の一態様にかかる力触覚情報伝達装置(10)は、
ユーザに装着する装着手段(11)と、
前記装着手段(11)に接続され、受信した力触覚情報を前記ユーザに伝達する力触覚情報伝達手段(12)と、
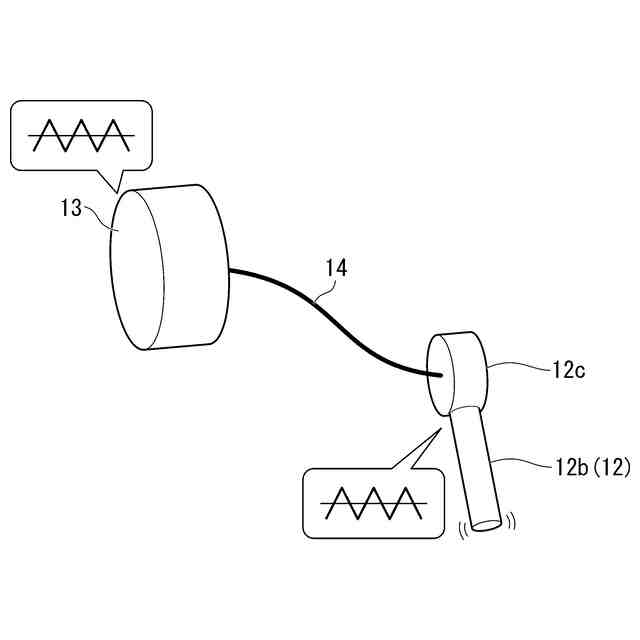
前記力触覚情報伝達手段(12)を駆動する駆動源(13)と、
前記駆動源(13)から減速機を介さずに駆動力を前記力触覚情報伝達手段(12)に伝達する駆動力伝達手段(14)と、
を有し、
前記駆動源(13)を搭載する駆動源部(15)は、前記装着手段(11)と前記駆動力伝達手段(14)のみで接続している、
ことにより上記課題を解決した。
【0008】
このような構成とすることで、減速機を介さずに駆動力伝達手段のみで駆動源によって力触覚情報伝達手段を駆動することができるため、根本的に減速機の有するバックラッシや摩擦の影響がない状態で、力触覚情報伝達手段を駆動することが可能となる。これにより、力触覚情報伝達手段が微小振動に近い繊細な駆動をおこなうことが可能となり、力触覚情報伝達手段によって力覚提示のみならず触覚提示をおこなうことが可能となる。
また、駆動源を装着手段に設ける必要がないため、装着手段を小型軽量化して、装着手段の装着性と操作性とを向上することが容易に可能となる。
【0009】
本発明の力触覚情報伝達装置(10)は、上記において、
前記装着手段(11)は、前記ユーザの手に装着され、
前記力触覚情報伝達手段(12)は、前記ユーザの複数の指にそれぞれ対応して設けられ、
前記力触覚情報伝達手段(12)は、前記力触覚情報として遠隔操作する際の感覚を前記ユーザにフィードバックする、
ことができる。
【0010】
このような構成とすることで、装着手段を装着したユーザの各指に力覚情報と触覚情報とを個別に伝達することが可能となる。これにより、力覚情報と触覚情報とを同一の機構で伝達することができるとともに、アバターロボットやVRの操作性をより精細におこなうことが可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
20日前
本田技研工業株式会社
収納部
1か月前
本田技研工業株式会社
ロボット
18日前
本田技研工業株式会社
積層装置
1か月前
本田技研工業株式会社
電解装置
3日前
本田技研工業株式会社
搬送装置
1か月前
本田技研工業株式会社
回転機械
19日前
本田技研工業株式会社
触媒インク
20日前
本田技研工業株式会社
触媒インク
20日前
本田技研工業株式会社
鞍乗型車両
1か月前
本田技研工業株式会社
鞍乗型車両
2日前
本田技研工業株式会社
外界認識装置
1か月前
本田技研工業株式会社
クラッチ装置
11日前
本田技研工業株式会社
導体接合方法
26日前
本田技研工業株式会社
鞍乗り型車両
10日前
本田技研工業株式会社
電力変換装置
1か月前
本田技研工業株式会社
車両制御装置
4日前
本田技研工業株式会社
鞍乗り型車両
12日前
本田技研工業株式会社
動力伝達装置
17日前
本田技研工業株式会社
位置推定装置
26日前
本田技研工業株式会社
薄板搬送装置
1か月前
本田技研工業株式会社
管理システム
27日前
本田技研工業株式会社
車両制御装置
26日前
本田技研工業株式会社
物体検出装置
1か月前
本田技研工業株式会社
鞍乗り型車両
19日前
本田技研工業株式会社
鞍乗り型車両
19日前
本田技研工業株式会社
作業システム
19日前
本田技研工業株式会社
電流検出装置
1か月前
本田技研工業株式会社
物体検出装置
1か月前
本田技研工業株式会社
電力変換装置
1か月前
本田技研工業株式会社
電流検出装置
1か月前
本田技研工業株式会社
ガス回収装置
1か月前
本田技研工業株式会社
鞍乗り型車両
24日前
本田技研工業株式会社
固体二次電池
2日前
本田技研工業株式会社
電力変換装置
27日前
本田技研工業株式会社
鞍乗り型車両
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ