TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025130834
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024028162
出願日
2024-02-28
発明の名称
情報処理装置、情報処理方法
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G06Q
30/015 20230101AFI20250902BHJP(計算;計数)
要約
【課題】サービス依頼者が、作業要件に合致したサービス提供者を選択可能な情報処理装置を提供する。
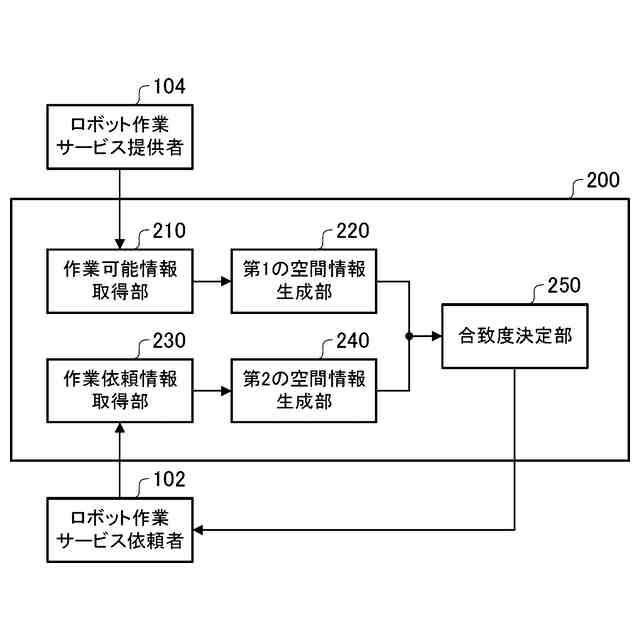
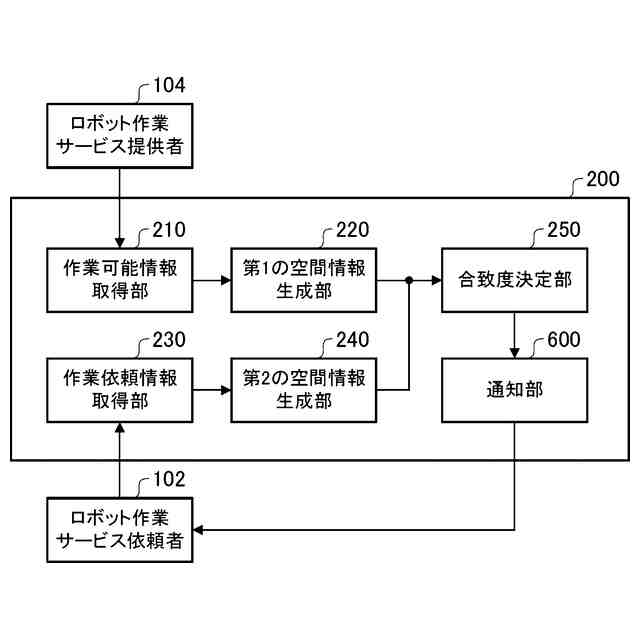
【解決手段】情報処理装置は、ロボット作業サービス提供者が作業可能な空間に関する作業可能情報を、ロボット作業サービス提供者に関連付けて取得する作業可能情報取得手段と、作業可能情報取得手段が取得した情報に基づいて、空間に関する第1の空間情報を生成する第1の空間情報生成手段と、ロボット作業サービス依頼者が作業を希望する空間に関する作業依頼情報を、前記ロボット作業サービス依頼者に関連付けて取得する作業依頼情報取得手段と、作業依頼情報取得手段が取得した情報に基づいて、空間に関する第2の空間情報を生成する第2の空間情報生成手段と、第1の空間情報と前記第2の空間情報とに基づき合致度を決定する合致度決定手段とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
ロボット作業サービス提供者が作業可能な空間に関する作業可能情報を、前記ロボット作業サービス提供者に関連付けて取得する作業可能情報取得手段と、
前記作業可能情報取得手段が取得した情報に基づいて、空間に関する第1の空間情報を生成する第1の空間情報生成手段と、
ロボット作業サービス依頼者が作業を希望する空間に関する作業依頼情報を、前記ロボット作業サービス依頼者に関連付けて取得する作業依頼情報取得手段と、
前記作業依頼情報取得手段が取得した情報に基づいて、空間に関する第2の空間情報を生成する第2の空間情報生成手段と、
前記第1の空間情報と前記第2の空間情報と、に基づいて合致度を決定する合致度決定手段と、を備えることを特徴とする情報処理装置。
続きを表示(約 1,600 文字)
【請求項2】
前記合致度決定手段が決定した合致度に基づき、前記ロボット作業サービス依頼者に対し、ロボット作業サービス提供者と前記合致度とを紐づけた情報を提示することを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記合致度決定手段が決定した合致度に基づき、前記ロボット作業サービス提供者に対し、ロボット作業サービス依頼者と前記合致度とを紐づけた情報を提示することを特徴とする請求項1に記載の情報処理装置。
【請求項4】
前記第1の空間情報と前記第2の空間情報には、ロボット作業の難易度に関係する空間情報パラメータが含まれ、
前記合致度決定手段は、前記空間情報パラメータの値に基づいて前記合致度を決定することを特徴とする請求項1に記載の情報処理装置。
【請求項5】
前記空間情報パラメータは、ロボットの作業種別ごとにあらかじめ定義され、前記空間情報パラメータの値は、前記ロボットの作業種別ごとに決定されることを特徴とする請求項4に記載の情報処理装置。
【請求項6】
ロボット作業サービス提供者が作業可能な空間に関する作業可能情報を、前記ロボット作業サービス提供者に関連付けて取得する作業可能情報取得手段と、
前記作業可能情報取得手段が取得した情報に基づいて、空間に関する第1の空間情報であって、前記ロボット作業サービス提供者が作業可能な空間における複数の物体の配置関係を表す物体配置特性データベースを生成する第1の空間情報生成手段と、
ロボット作業サービス依頼者が作業を希望する空間に関する作業依頼情報を、前記ロボット作業サービス依頼者に関連付けて取得する作業依頼情報取得手段と、
前記作業依頼情報取得手段が取得した情報に基づいて、空間に関する第2の空間情報であって、前記ロボット作業サービス依頼者が作業を希望する空間に存在する複数の物体それぞれの、種別を表す物体種別情報、および位置情報を生成する第2の空間情報生成手段と、
前記第2の空間情報に含まれる前記物体種別情報と前記位置情報をキーとして、前記物体配置特性データベースを検索して、空間に関する第3の空間情報であって、前記物体種別情報と前記位置情報とを含む情報を生成する第3の空間情報生成手段と、
前記第3の空間情報に含まれる前記物体種別情報と前記位置情報、および前記第2の空間情報に含まれる前記物体種別情報と前記位置情報に基づいて合致度を決定する合致度決定手段と、を備えることを特徴とする情報処理装置。
【請求項7】
前記物体配置特性データベースには、ロボット作業の難易度に関係する空間情報パラメータが含まれ、
前記合致度決定手段は、前記空間情報パラメータの値に基づいて前記合致度を決定することを特徴とする請求項6に記載の情報処理装置。
【請求項8】
前記空間情報パラメータは、ロボットの作業種別ごとにあらかじめ定められ、前記空間情報パラメータの値は、前記ロボットの作業種別ごとに生成されることを特徴とする請求項7に記載の情報処理装置。
【請求項9】
ロボット作業サービス提供者が作業可能な空間に関する作業可能情報を、前記ロボット作業サービス提供者に関連付けて取得する作業可能情報取得工程と、
前記作業可能情報取得手段が取得した情報に基づいて、空間に関する第1の空間情報を生成する第1の空間情報生成工程と、
ロボット作業サービス依頼者が作業を希望する空間に関する作業依頼情報を、前記ロボット作業サービス依頼者に関連付けて取得する作業依頼情報取得工程と、
前記作業依頼情報取得手段が取得した情報に基づいて、空間に関する第2の空間情報を生成する第2の空間情報生成工程と、
前記第1の空間情報と前記第2の空間情報と、に基づいて合致度を決定する合致度決定工程と、を備えることを特徴とする情報処理方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットによる作業を提供する技術に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
近年、様々な分野でのロボットの活用が進んでいる。ロボットを導入したい一方でコストの観点から、ロボットをシェアするサービスが登場してきた。特許文献1では、ロボットの作業実績を蓄積し、予約したい作業内容に適したロボットを予約するシステムについて提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-46791
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら特許文献1の方法では、ロボットによる作業をサービスとして提供する業者が複数あった場合、サービスの依頼者が作業要件に合致した業者を選択することが出来なかった。
本発明は、上記の課題を鑑みてなされたものであり、ロボットによる作業サービスの依頼者が複数のサービス提供業者から作業要件に合致した業者を選択出来るようにすることを目的とする。
【課題を解決するための手段】
【0005】
上記の課題を解決するため、本発明に係る情報処理装置は、ロボット作業サービス提供者が作業可能な空間に関する作業可能情報を、前記ロボット作業サービス提供者に関連付けて取得する作業可能情報取得手段と、前記作業可能情報取得手段が取得した情報に基づいて、空間に関する第1の空間情報を生成する第1の空間情報生成手段と、ロボット作業サービス依頼者が作業を希望する空間に関する作業依頼情報を、前記ロボット作業サービス依頼者に関連付けて取得する作業依頼情報取得手段と、前記作業依頼情報取得手段が取得した情報に基づいて、空間に関する第2の空間情報を生成する第2の空間情報生成手段と、前記第1の空間情報と前記第2の空間情報と、に基づいて合致度を決定する合致度決定手段と、を備えることを特徴とする。
【発明の効果】
【0006】
本発明によれば、ロボットによる作業サービスの依頼者は、依頼者が要望する作業要件に合致したサービス提供者を、複数のサービス提供者の中から選択することができる。
【図面の簡単な説明】
【0007】
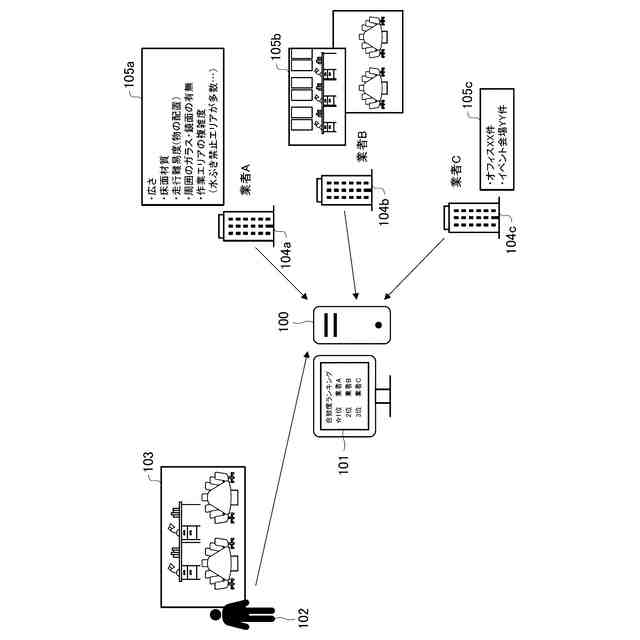
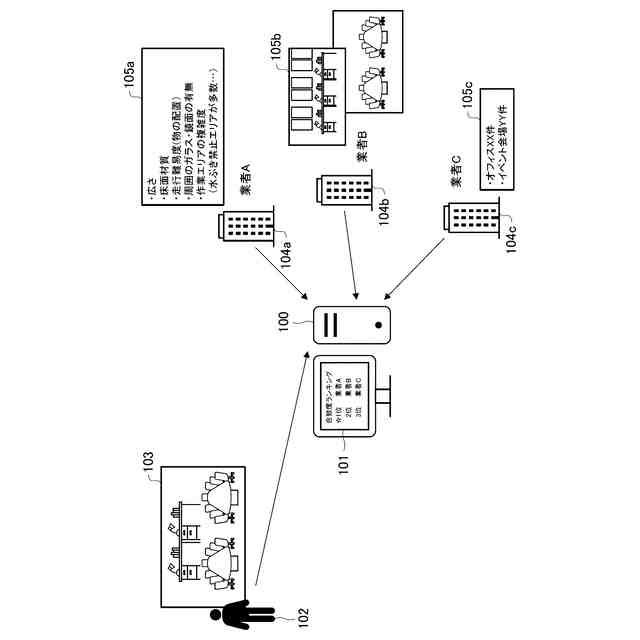
本発明の情報処理装置を利用した説明図である。
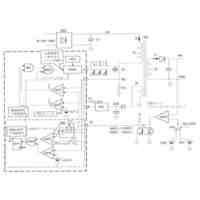
実施例1に係る情報処理装置の一例を示す機能ブロック図である。
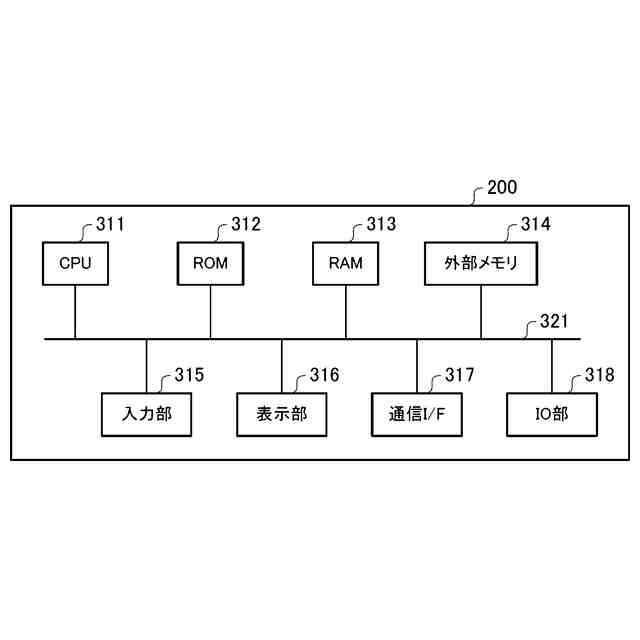
実施例1に係る情報処理装置のハードウェア構成の一例を示すブロック図である。
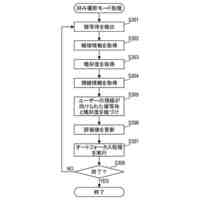
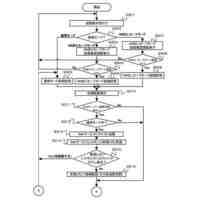
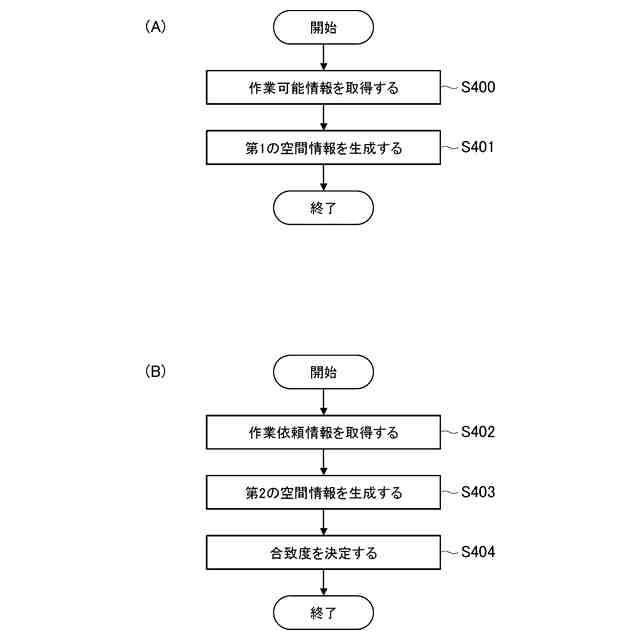
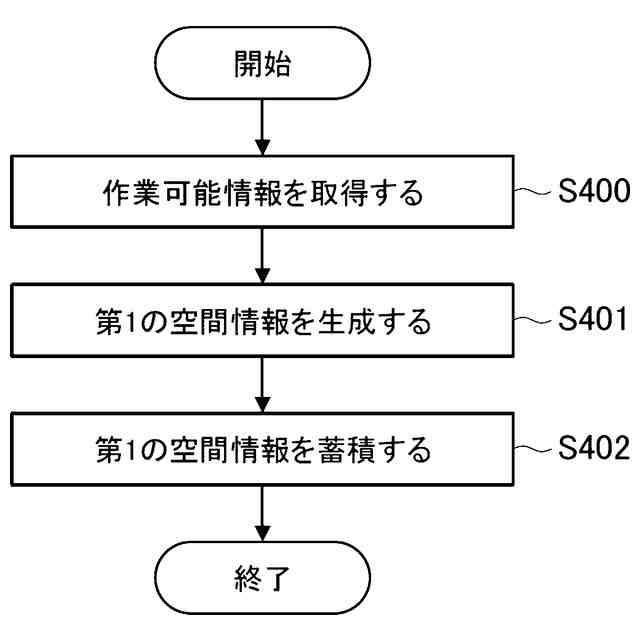
実施例1に係る情報処理装置の動作の一例を説明するフローチャートである。
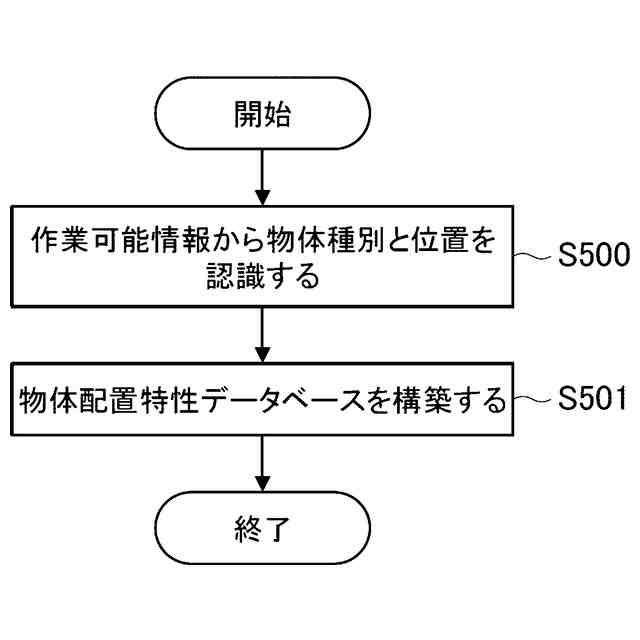
実施例1に係る情報処理装置内の第1の空間情報生成部の動作の一例を説明するフローチャートである。
実施例5に係る情報処理装置の一例を示す機能ブロック図である。
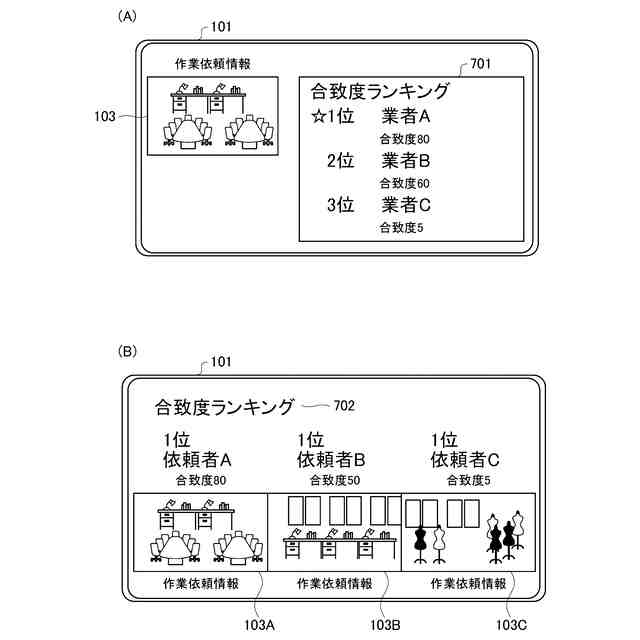
実施例5に係る情報処理装置の表示装置の一例を示す図である。
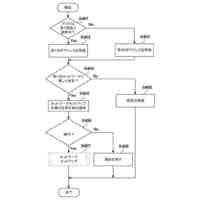
変形例1に係る情報処理装置の動作の一例を説明するフローチャートである。
【発明を実施するための形態】
【0008】
本実施形態では、ロボット作業サービス依頼者をユーザーとし、ユーザーの作業要件に合致したロボット作業サービス提供者を選択できるよう、依頼者の依頼とサービス提供者の実績の合致度を決定する情報処理装置について説明する。本実施形態において、ユーザーの作業要件は、提供者がロボット作業を行うことができる空間と、依頼者がロボット作業を依頼したい空間とが、似た空間であることである。合致度を決定するため、本実施例の情報処理装置はサービス依頼者およびサービス提供者から空間情報を取得する。ここで空間情報とは、ロボットが実際に作業を実施する場所の情報のことであり、その場所に存在する物体の種別、各物体の位置を認識できる情報である。合致度とは、ロボット作業サービス提供者がロボット作業を行うことができる作業空間と、ロボット作業サービス依頼者が依頼したい空間がどの程度似ているかを空間情報から判断した結果を表す。本実施例では、空間に存在する物体と、その物体の配置が似ているほど合致していることとする。なお、本実施形態において示す構成は一例にすぎず、本発明は図示された構成に限定されるものではない。
【0009】
図1に本発明の情報処理装置を利用した図を示す。本実施例の情報処理装置はPC100を用いて実装されている。101は表示装置である。ユーザーであるロボット作業サービス依頼者102は、情報処理装置に作業依頼情報である、作業を依頼したい空間の作業画像群を作業依頼情報103として入力する。ロボット作業サービス提供者104a~104cは、各々が作業可能な条件を示す情報として作業可能情報105a~105cをPC100に入力する。PC100は合致度を決定し、その結果を表示装置101に表示する。
【0010】
本発明の情報処理装置を示す機能ブロック図を図2に示す。尚、図2に示される夫々の機能ブロックは、同じ筐体に内蔵されていなくても良く、互いに信号路を介して接続された別々の装置により構成しても良い。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
キヤノン株式会社
トナー
10日前
キヤノン株式会社
移動体
29日前
キヤノン株式会社
光学装置
7日前
キヤノン株式会社
光学機器
23日前
キヤノン株式会社
電子機器
21日前
キヤノン株式会社
電源装置
1か月前
キヤノン株式会社
撮像装置
21日前
キヤノン株式会社
撮像装置
16日前
キヤノン株式会社
撮像装置
4日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
発光装置
28日前
キヤノン株式会社
定着装置
2日前
キヤノン株式会社
定着装置
2日前
キヤノン株式会社
定着装置
2日前
キヤノン株式会社
電子機器
4日前
キヤノン株式会社
撮像装置
15日前
キヤノン株式会社
発光装置
23日前
キヤノン株式会社
電子機器
2日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
現像装置
10日前
キヤノン株式会社
現像装置
1か月前
キヤノン株式会社
電子機器
10日前
キヤノン株式会社
記録装置
1か月前
キヤノン株式会社
電子機器
1か月前
キヤノン株式会社
撮像装置
7日前
キヤノン株式会社
電子機器
7日前
キヤノン株式会社
プログラム
1か月前
キヤノン株式会社
乳酸センサ
1か月前
キヤノン株式会社
容器構造体
15日前
キヤノン株式会社
レンズ装置
1か月前
キヤノン株式会社
容器構造体
15日前
キヤノン株式会社
画像形成装置
28日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成装置
28日前
キヤノン株式会社
画像形成装置
25日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ