TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025130584
公報種別
公開特許公報(A)
公開日
2025-09-08
出願番号
2024027844
出願日
2024-02-27
発明の名称
コンピュータプログラム、および、情報処理装置
出願人
ブラザー工業株式会社
代理人
鳳国際弁理士法人
主分類
G06T
7/70 20170101AFI20250901BHJP(計算;計数)
要約
【課題】第2物体に対する第1物体の相対的な位置に関する新たな技術の提供。
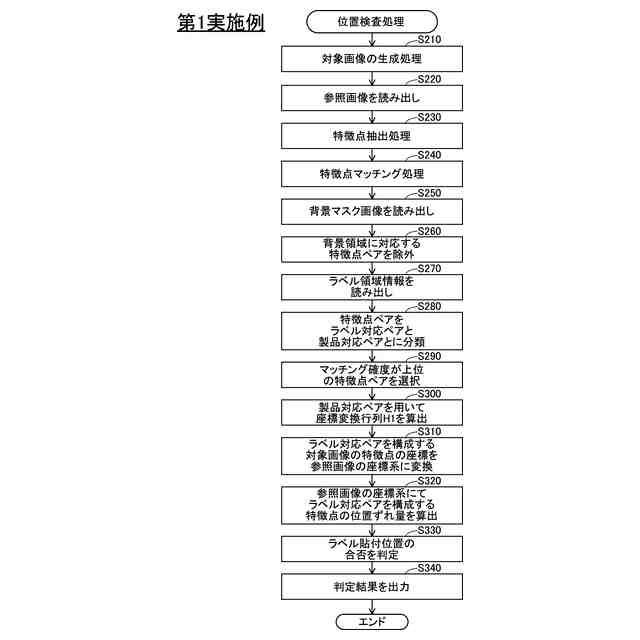
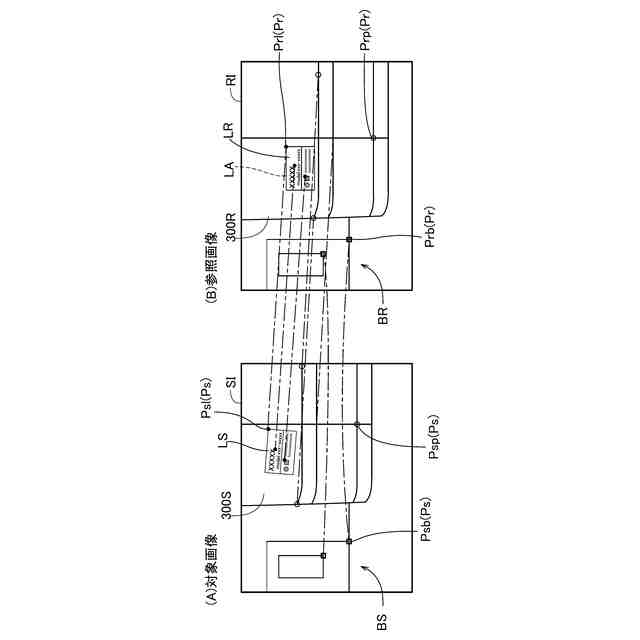
【解決手段】第1物体を含む第2物体を示す参照画像と対象画像との間の特徴点マッチングを実行して複数の特徴点ペアが決定される。複数の特徴点ペアのうち、第1物体とは異なる部分に対応する特徴点ペアを用いて、参照画像と対象画像との間の位置関係を示す座標変換行列が算出され、参照画像と対象画像との第1物体の位置に関する特定情報と、座標変換行列と、を用いて、参照画像内の第1物体と対象画像内の第1物体との差異情報が算出される。もしくは、複数の特徴点ペアのうち、第1物体に対応する特徴点ペアを用いて、座標変換行列が算出され、参照画像と対象画像とのそれぞれの第1物体とは異なる部分の位置に関する特定情報と、座標変換行列と、を用いて、差異情報が算出される。
【選択図】 図5
特許請求の範囲
【請求項1】
コンピュータプログラムであって、
第1物体を含む第2物体を示す参照画像を取得する参照画像取得機能と、
前記第1物体を含む前記第2物体を示す対象画像を取得する対象画像取得機能と、
前記参照画像と前記対象画像との間の特徴点マッチングを実行して複数の特徴点ペアを決定するペア決定機能であって、複数の特徴点ペアのそれぞれは、前記参照画像内の特徴点と前記対象画像内の特徴点とのペアである、前記ペア決定機能と、
前記複数の特徴点ペアのうち、前記第1物体とは異なる部分に対応する前記特徴点ペアを用いて、前記参照画像と前記対象画像との間の位置関係を示す第1座標変換行列を算出する行列算出機能と、
前記参照画像と前記対象画像とのそれぞれの前記第1物体の位置に関する特定情報と、前記第1座標変換行列と、を用いて、前記参照画像内の前記第1物体と前記対象画像内の前記第1物体との差異情報を算出する差異情報算出機能であって、前記差異情報は、前記第2物体に対する前記第1物体の相対的な位置の差異に関する情報を含む、前記差異情報算出機能と、
をコンピュータに実現させるコンピュータプログラム。
続きを表示(約 1,800 文字)
【請求項2】
請求項1に記載のコンピュータプログラムであって、さらに、
前記参照画像と前記対象画像との少なくとも一方の画像において、前記第2物体が位置する物体領域と、前記物体領域とは異なる背景領域と、を特定する領域特定機能をコンピュータに実現させ、
前記行列算出機能は、前記物体領域のうちの前記第1物体とは異なる部分に対応する前記特徴点ペアを用いて、前記背景領域に対応する前記特徴点ペアを用いずに、前記第1座標変換行列を算出する、コンピュータプログラム。
【請求項3】
請求項2に記載のコンピュータプログラムであって、さらに、
前記領域特定機能は、
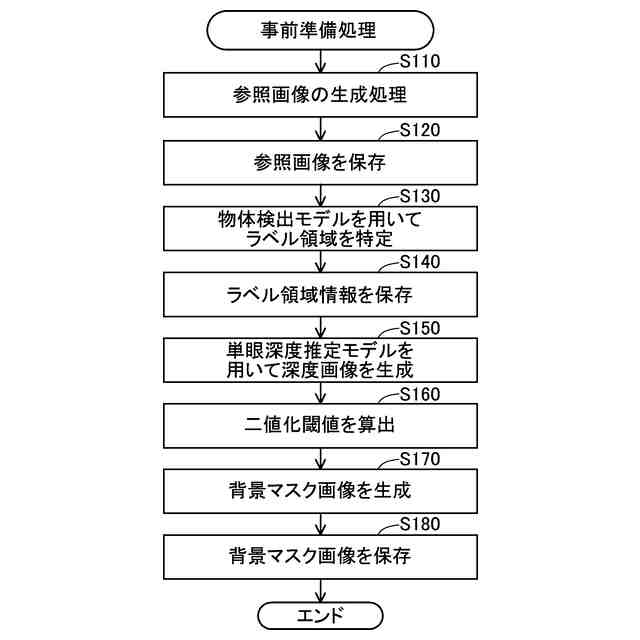
単眼深度推定モデルに前記参照画像と前記対象画像との少なくとも一方の画像を入力して、深度画像を生成し、
前記深度画像に基づいて、前記参照画像と前記対象画像との少なくとも一方の画像において前記物体領域と前記背景領域とを特定する、コンピュータプログラム。
【請求項4】
請求項3に記載のコンピュータプログラムであって、
前記領域特定機能は、
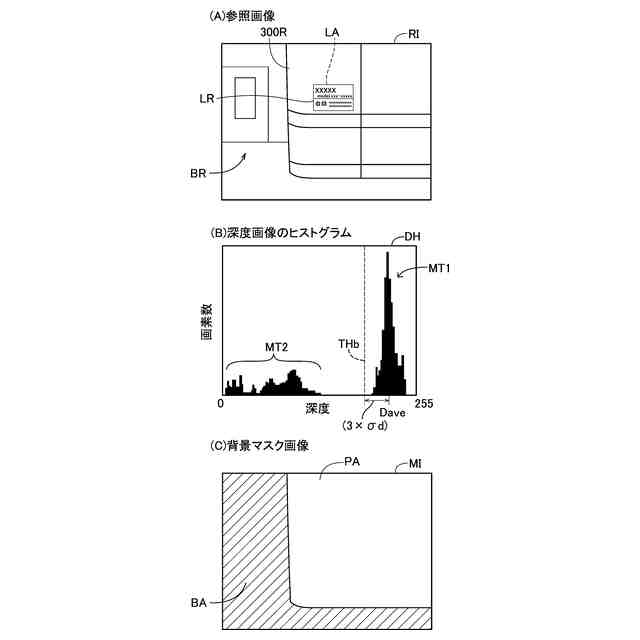
前記深度画像のヒストグラムが、前記物体領域に対応する第1山部と、前記背景領域に対応する第2山部と、を含む複数の山部を有すると仮定して、前記第1山部の平均と分散とを算出し、
前記第1山部の平均と分散とを用いて、二値化閾値を決定し、
前記深度画像を前記二値化閾値を用いて二値化することによって、前記物体領域と前記背景領域とを特定する、コンピュータプログラム。
【請求項5】
請求項2に記載のコンピュータプログラムであって、
前記領域特定機能は、前記参照画像における前記物体領域と前記背景領域とを特定し、
前記行列算出機能は、前記参照画像の前記物体領域のうちの前記第1物体とは異なる部分に対応する前記特徴点ペアを用いて、前記参照画像の前記背景領域に対応する前記特徴点ペアを用いずに、前記第1座標変換行列を算出する、コンピュータプログラム。
【請求項6】
請求項1に記載のコンピュータプログラムであって、さらに、
物体検出モデルに前記参照画像と前記対象画像との少なくとも一方の画像を入力して、前記少なくとも一方の画像内の前記第1物体が位置する領域を特定するオブジェクト特定機能をコンピュータに実現させ、
前記行列算出機能は、前記複数の特徴点ペアのうち、特定済みの前記第1物体が位置する領域内の前記特徴点を含まない前記特徴点ペアを用いて、前記第1座標変換行列を算出する、コンピュータプログラム。
【請求項7】
請求項1に記載のコンピュータプログラムであって、
前記第1物体とは異なる部分に対応する複数の前記特徴点ペアの中から、前記特徴点ペアのマッチングの確度を用いて、複数の使用ペアを選択するペア選択機能をコンピュータに実現させ、
前記行列算出機能は、選択された前記複数の使用ペアを用いて前記第1座標変換行列を算出する、コンピュータプログラム。
【請求項8】
請求項1に記載のコンピュータプログラムであって、
前記特定情報は、前記複数の特徴点ペアのうち、前記第1物体に対応する前記特徴点ペアの情報である、コンピュータプログラム。
【請求項9】
請求項8に記載のコンピュータプログラムであって、
前記差異情報算出機能は、
前記第1座標変換行列を用いて、前記第1物体に対応する前記特徴点ペアを構成する前記対象画像の特徴点の座標を前記参照画像の座標系の座標に変換し、
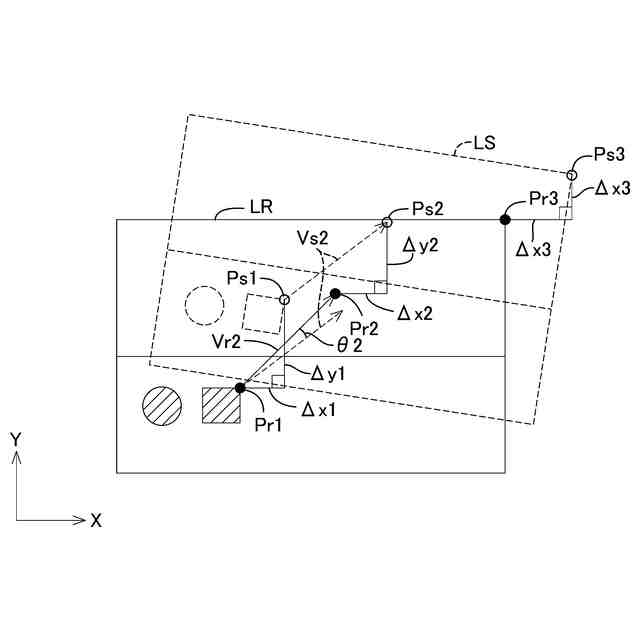
前記参照画像の座標系において、前記第1物体に対応する前記特徴点ペアを構成する2個の特徴点の位置ずれを示す情報を前記差異情報として算出する、コンピュータプログラム。
【請求項10】
請求項8に記載のコンピュータプログラムであって、
前記差異情報算出機能は、
前記第1座標変換行列を用いて、前記第1物体に対応する前記特徴点ペアを構成する前記参照画像の特徴点の座標を前記対象画像の座標系の座標に変換し、
前記対象画像の座標系において、前記第1物体に対応する前記特徴点ペアを構成する2個の特徴点の位置ずれを示す情報を前記差異情報として算出する、コンピュータプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書は、コンピュータプログラム、および、情報処理装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
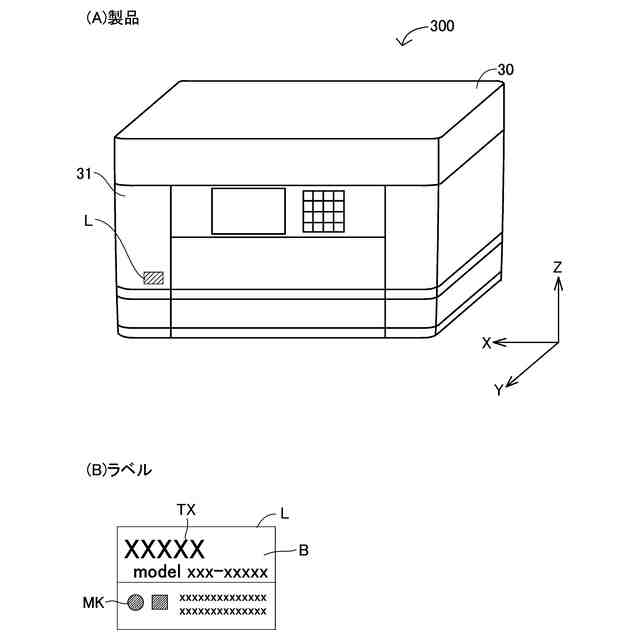
物体(例えば、複合機などの製品に貼付されたラベルシート)を撮影した撮影画像を用いて、物体の検査を行う技術が知られている。例えば、特許文献1は、以下の技術を開示する。ラベルシートの画像データを機械学習モデルに入力することによって、不具合の無いラベルシートの画像データを生成する。入力された画像と生成された画像との間の差分を表す差分画像データを使用して、物体に異常があるか否かを検査する。
【先行技術文献】
【非特許文献】
【0003】
特開2022-174516号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、第2物体(例えば、製品)に対する第1物体(例えば、ラベルシート)の相対的な位置に関する処理には、工夫の余地があった。
【0005】
本明細書は、第2物体に対する第1物体の相対的な位置に関する処理のための新たな技術を開示する。
【課題を解決するための手段】
【0006】
本明細書に開示された技術は、以下の適用例として実現することが可能である。
【0007】
[適用例1]コンピュータプログラムであって、
第1物体を含む第2物体を示す参照画像を取得する参照画像取得機能と、
前記第1物体を含む前記第2物体を示す対象画像を取得する対象画像取得機能と、
前記参照画像と前記対象画像との間の特徴点マッチングを実行して複数の特徴点ペアを決定するペア決定機能であって、複数の特徴点ペアのそれぞれは、前記参照画像内の特徴点と前記対象画像内の特徴点とのペアである、前記ペア決定機能と、
前記複数の特徴点ペアのうち、前記第1物体とは異なる部分に対応する前記特徴点ペアを用いて、前記参照画像と前記対象画像との間の位置関係を示す第1座標変換行列を算出する行列算出機能と、
前記参照画像と前記対象画像とのそれぞれの前記第1物体の位置に関する特定情報と、前記第1座標変換行列と、を用いて、前記参照画像内の前記第1物体と前記対象画像内の前記第1物体との差異情報を算出する差異情報算出機能であって、前記差異情報は、前記第2物体に対する前記第1物体の相対的な位置の差異に関する情報を含む、前記差異情報算出機能と、
をコンピュータに実現させるコンピュータプログラム。
【0008】
上記構成によれば、第1物体とは異なる部分に対応する特徴点ペアを用いて算出される第1座標変換行列と、参照画像と対象画像とのそれぞれの第1物体の位置に関する特定情報と、を用いて差異情報が算出される。この結果、第2物体に対する第1物体の相対的な位置の差異を適切に示す差異情報を算出し得る。したがって、例えば、対象画像における第2物体の位置と、参照画像における第2物体の位置と、が異なっていても、第2物体に含まれる第1物体の位置を検査し得る。
【0009】
[適用例2]コンピュータプログラムであって、
第1物体を含む第2物体を示す参照画像を取得する参照画像取得機能と、
前記第1物体を含む前記第2物体を示す対象画像を取得する対象画像取得機能と、
前記参照画像と前記対象画像との間の特徴点マッチングを実行して複数の特徴点ペアを決定するペア決定機能であって、複数の特徴点ペアのそれぞれは、前記参照画像内の特徴点と前記対象画像内の特徴点とのペアである、前記ペア決定機能と、
前記複数の特徴点ペアのうち、前記第1物体に対応する前記特徴点ペアを用いて、前記参照画像と前記対象画像との間の位置関係を示す第1座標変換行列を算出する行列算出機能と、
前記参照画像と前記対象画像とのそれぞれの前記第1物体とは異なる部分の位置に関する特定情報と、前記第1座標変換行列と、を用いて、前記参照画像内の前記第1物体と前記対象画像内の前記第1物体との差異情報を算出する差異情報算出機能であって、前記差異情報は、前記第2物体に対する前記第1物体の相対的な位置の差異に関する情報を含む、前記差異情報算出機能と、
をコンピュータに実現させるコンピュータプログラム。
【0010】
上記構成によれば、第1物体に対応する特徴点ペアを用いて算出される第1座標変換行列と、参照画像と対象画像とのそれぞれの第1物体とは異なる部分の位置に関する特定情報と、を用いて差異情報が算出される。この結果、第2物体に対する第1物体の相対的な位置の差異を適切に示す差異情報を算出し得る。したがって、例えば、対象画像における第2物体の位置と、参照画像における第2物体の位置と、が異なっていても、第2物体に含まれる第1物体の位置を検査し得る。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ブラザー工業株式会社
複合機
今日
ブラザー工業株式会社
給紙装置
15日前
ブラザー工業株式会社
現像装置
11日前
ブラザー工業株式会社
プリンタ
27日前
ブラザー工業株式会社
画像形成装置
今日
ブラザー工業株式会社
画像形成装置
今日
ブラザー工業株式会社
画像形成装置
12日前
ブラザー工業株式会社
通信システム
11日前
ブラザー工業株式会社
画像形成装置
今日
ブラザー工業株式会社
液体吐出装置
19日前
ブラザー工業株式会社
画像形成装置
19日前
ブラザー工業株式会社
液体吐出装置
21日前
ブラザー工業株式会社
液滴吐出装置
25日前
ブラザー工業株式会社
画像形成装置
今日
ブラザー工業株式会社
画像形成装置
4日前
ブラザー工業株式会社
画像形成装置
今日
ブラザー工業株式会社
画像形成装置
今日
ブラザー工業株式会社
シート搬送装置
27日前
ブラザー工業株式会社
シート搬送装置
27日前
ブラザー工業株式会社
現像カートリッジ
22日前
ブラザー工業株式会社
トナーカートリッジ
26日前
ブラザー工業株式会社
サポートプログラム
18日前
ブラザー工業株式会社
画像形成装置及びシステム
27日前
ブラザー工業株式会社
画像形成装置及びプログラム
27日前
ブラザー工業株式会社
複合機及び消耗品管理システム
15日前
ブラザー工業株式会社
紙粉排出方法および画像形成装置
26日前
ブラザー工業株式会社
プログラム、および、画像処理装置
14日前
ブラザー工業株式会社
画像形成装置および画像形成システム
22日前
ブラザー工業株式会社
画像処理プログラム及び情報処理装置
25日前
ブラザー工業株式会社
現像カートリッジおよび画像形成装置
8日前
ブラザー工業株式会社
画像読取装置、画像形成装置及び複合機
1日前
ブラザー工業株式会社
印刷装置、保護カバーおよび印刷装置本体
18日前
ブラザー工業株式会社
液体吐出装置、その制御方法及びプログラム
25日前
ブラザー工業株式会社
液体吐出装置及びそれに用いられる液体セット
6日前
ブラザー工業株式会社
コンピュータプログラム、および、情報処理装置
1日前
ブラザー工業株式会社
情報処理装置、及び、情報処理装置用プログラム
7日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ