TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025129686
公報種別
公開特許公報(A)
公開日
2025-09-05
出願番号
2024026491
出願日
2024-02-26
発明の名称
マニピュレータを備えた移動ロボット
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B25J
19/06 20060101AFI20250829BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】接触や衝突の可能性あるいは頻度を低下させて安全性を高めた移動ロボットを提供する。
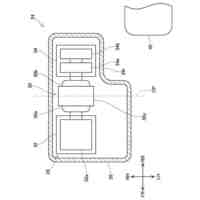
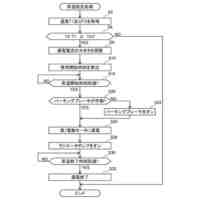
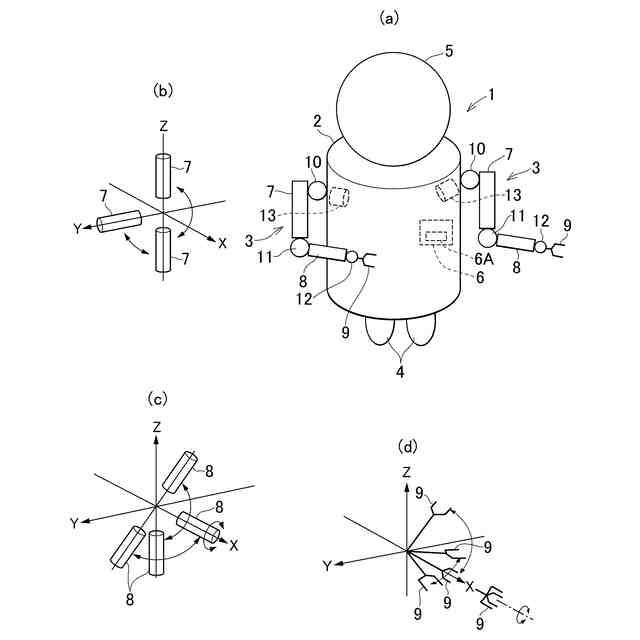
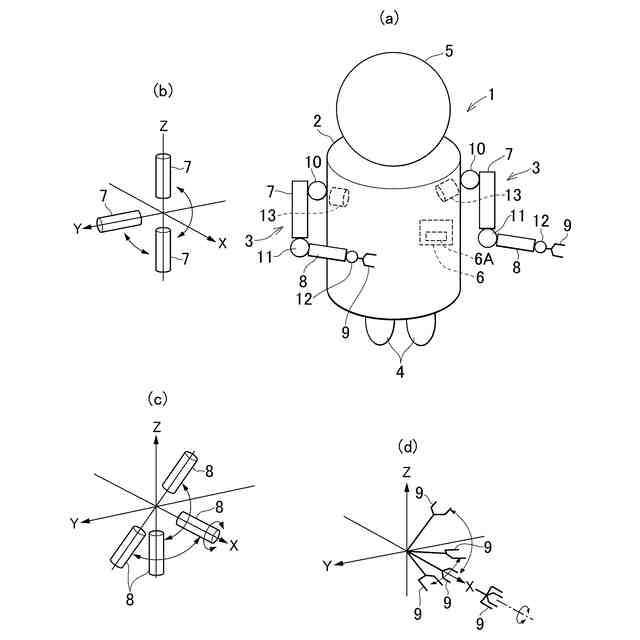
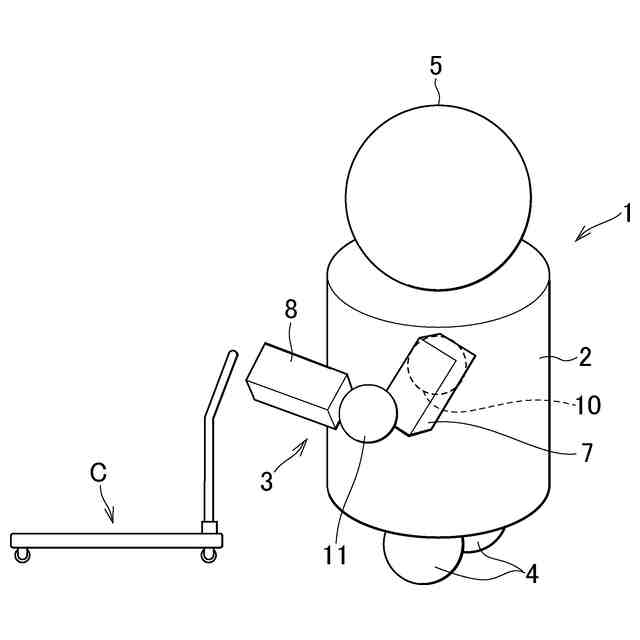
【解決手段】脚相当部4とマニピュレータ3との動きを制御するコントローラ6は、マニピュレータ3の胴体部2に対する相対的な位置である姿勢を、脚相当部4を動作させて移動している場合の移動時姿勢と、脚相当部4の動作を止めて停止しかつ把持部9によって所定の対象物の把持もしくは把持の解除を行っている場合の停止時姿勢とで異ならせる姿勢制御部6Aを有し、姿勢制御部6Aは、移動時姿勢を、脚相当部4を動作させて移動している場合の把持部9の胴体部2からの離隔量が、把持部2によって所定の対象物の把持9もしくは把持の解除を行っている場合の停止時姿勢における把持部9の胴体部2からの離隔量より小さくなる姿勢にマニピュレータ3を制御するように構成されている。
【選択図】図1
特許請求の範囲
【請求項1】
床面上を移動するための脚相当部が胴体部の下部に設けられるとともに、屈伸ならびに回転が可能なマニピュレータが前記胴体部に取り付けられ、前記マニピュレータは、少なくとも、肩関節部によって前記胴体部に連結されている上腕相当部と、前記上腕相当部の先端部に肘関節部によって連結されている前腕相当部と、前記前腕相当部の先端部に手首関節部によって連結された把持部とを含むマニピュレータを備えた移動ロボットであって、
前記脚相当部と前記マニピュレータとの動きを制御するコントローラを備え、
前記コントローラは、
前記マニピュレータの前記胴体部に対する相対的な位置である姿勢を、前記脚相当部を動作させて移動している場合の移動時姿勢と、前記脚相当部の動作を止めて停止しかつ前記把持部によって所定の対象物の把持もしくは把持の解除を行っている場合の停止時姿勢とで異ならせる姿勢制御部を有し、
前記姿勢制御部は、前記移動時姿勢を、前記脚相当部を動作させて移動している場合の前記把持部の前記胴体部からの離隔量が、前記把持部によって所定の対象物の把持もしくは把持の解除を行っている場合の停止時姿勢における前記把持部の前記胴体部からの離隔量より小さくなる姿勢に前記マニピュレータを制御するように構成されている
ことを特徴とするマニピュレータを備えた移動ロボット。
続きを表示(約 620 文字)
【請求項2】
請求項1に記載のマニピュレータを備えた移動ロボットであって、
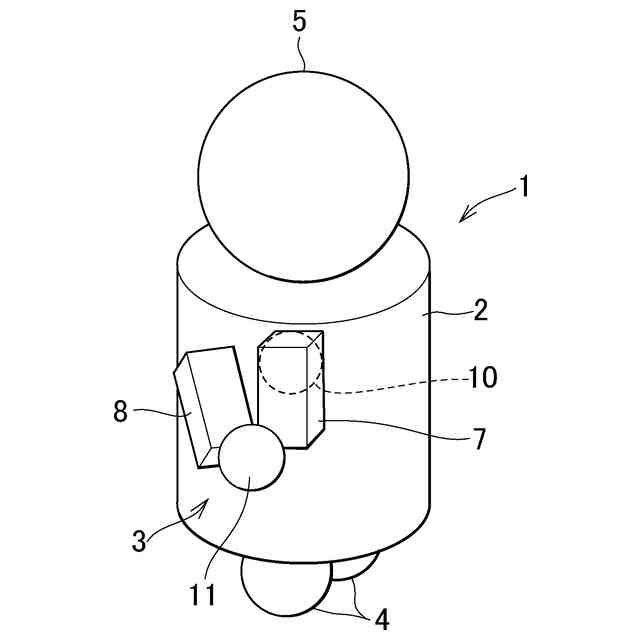
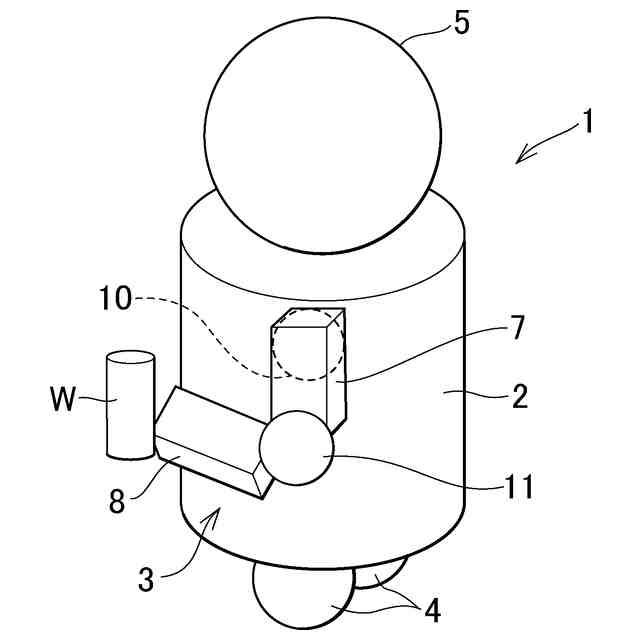
前記移動時姿勢は、前記把持部が前記所定の対象物を把持せずに移動している場合の第1移動時姿勢と、前記把持部によって前記所定の対象物を把持して移動している場合の第2移動時姿勢とを含み、
前記第1移動時姿勢は、前記上腕相当部と前記前腕相当部とのなす角度が、前記第2移動時姿勢における前記上腕相当部と前記前腕相当部とのなす角度より小さい折り畳み姿勢である
ことを特徴とするマニピュレータを備えた移動ロボット。
【請求項3】
請求項1または2に記載のマニピュレータを備えた移動ロボットであって、
前記姿勢制御部は、前記移動時姿勢における、前記上腕相当部の外力による動きやすさであるバックドライバビリティと、前記前腕相当部の外力による動きやすさであるバックドライバビリティとを異ならせるように構成されている
ことを特徴とするマニピュレータを備えた移動ロボット。
【請求項4】
請求項3に記載のマニピュレータを備えた移動ロボットであって、
前記姿勢制御部は、前記脚相当部を動作させて移動している際に、前記マニピュレータの前記外力によって前記胴体部への接近距離を予め定めた距離に制限する姿勢制限制御を行うように構成されている
ことを特徴とするマニピュレータを備えた移動ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、人間の腕を模擬した動きの可能なマニピュレータもしくは多関節アームを備えた移動ロボットに関するものである。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
この種のロボットは、人と混在して作業を行うことが想定されている。その場合、作業環境中の人や設備機器類などとの衝突もしくは接触が生じることが考えられるので、ロボットにはそのような衝突による損傷を避けるように動作することが要求される。すなわち、この種のロボットは安全性を備えていることが必要である。特許文献1では、安全性を高めたロボットが提案されている。そのロボットは、ボディに取り付けてあるアームが多関節構造になっており、その関節に相当する部分にそれぞれ軸トルク検出センサを組み込み、アームが人に接触するなどのことによって外力を受けた場合に、軸トルク検出センサが出力する信号に基づいて接触もしくは衝突を検知し、その検知の結果に基づいてロボットの各部分の制御を行うように構成している。また、特許文献1には、ロボットが移動している際に、アームをサーボロックすることが記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2008-229800号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されているロボットでは、アームが作業環境中の人や設備機器類に接触もしくは衝突した場合に、各軸トルク検出センサに外力が作用して信号を出力するので、アームの接触あるいは衝突を確実に、もしくは精度よく検知することができる。しかしながら、アームを構成している各関節の部分のそれぞれに軸トルク検出センサを組み込むことになるので、アームが大型化し、またその重量(慣性質量)が大きくなり、さらには複雑な制御を必要とするなどの課題がある。また、特許文献1に記載されているロボットは、アームの接触もしくは衝突を確実に、もしくは正確に検知することを目的としたロボットであり、言い換えれば、アームの接触もしくは衝突を前提とし、その後の制御を改善したロボットである。したがって、アームの慣性質量が大きいと接触もしくは衝突時の衝撃力が大きくなってしまうので、その点で安全性が劣る可能性がある。ましてや、移動中にアームをサーボロックすると、ロボットの慣性力がそのまま接触もしくは衝突した対象物に作用するので、衝撃力が大きくなってしまう。
【0005】
アームの接触もしくは衝突時の衝撃力は、ロボットの移動速度(走行速度)を遅くすることにより低減できるが、そうすると、ロボットによる作業速度あるいは作業効率が低下してしまう。これに対して、バックドライバビリティを高めたロボットであれば、ロボット自体あるいはアームが、外力の作用する方向に後退するなど、衝撃力を緩和する方向に動作する。したがって、バックドライバビリティを高くすることにより、ロボットの安全性を損なわずに、ロボットの移動速度をある程度速い速度に維持できる。しかしながら、移動中のロボットの姿勢によっては、アームが接触もしくは衝突する頻度が高くなり、作業環境中の人や周辺機器類の損傷を回避できるとしても、ロボットの停止もしくは減速の頻度が高くなって、ロボットの作業効率が低下するなどの可能性がある。
【0006】
本発明は、上記の技術的課題に着目してなされたものであって、移動中の接触もしくは衝突の安全性を高くした移動ロボットを提供することを目的とするものである。
【課題を解決するための手段】
【0007】
本発明は、上記の目的を達成するために、床面上を移動するための脚相当部が胴体部の下部に設けられるとともに、屈伸ならびに回転が可能なマニピュレータが前記胴体部に取り付けられ、前記マニピュレータは、少なくとも、肩関節部によって前記胴体部に連結されている上腕相当部と、前記上腕相当部の先端部に肘関節部によって連結されている前腕相当部と、前記前腕相当部の先端部に手首関節部によって連結された把持部とを含むマニピュレータを備えた移動ロボットであって、前記脚相当部と前記マニピュレータとの動きを制御するコントローラを備え、前記コントローラは、前記マニピュレータの前記胴体部に対する相対的な位置である姿勢を、前記脚相当部を動作させて移動している場合の移動時姿勢と、前記脚相当部の動作を止めて停止しかつ前記把持部によって所定の対象物の把持もしくは把持の解除を行っている場合の停止時姿勢とで異ならせる姿勢制御部を有し、前記姿勢制御部は、前記移動時姿勢を、前記脚相当部を動作させて移動している場合の前記把持部の前記胴体部からの離隔量が、前記把持部によって所定の対象物の把持もしくは把持の解除を行っている場合の停止時姿勢における前記把持部の前記胴体部からの離隔量より小さくなる姿勢に前記マニピュレータを制御するように構成されていることを特徴とするものである。
【0008】
本発明では、前記移動時姿勢は、前記把持部が前記所定の対象物を把持せずに移動している場合の第1移動時姿勢と、前記把持部によって前記所定の対象物を把持して移動している場合の第2移動時姿勢とを含み、前記第1移動時姿勢は、前記上腕相当部と前記前腕相当部とのなす角度が、前記第2移動時姿勢における前記上腕相当部と前記前腕相当部とのなす角度より小さい折り畳み姿勢であってよい。
【0009】
本発明では、前記姿勢制御部は、前記移動時姿勢における、前記上腕相当部の外力による動きやすさであるバックドライバビリティと、前記前腕相当部の外力による動きやすさであるバックドライバビリティとを異ならせるように構成されていてよい。
【0010】
本発明では、前記姿勢制御部は、前記脚相当部を動作させて移動している際に、前記マニピュレータの前記外力によって前記胴体部への接近距離を予め定めた距離に制限する姿勢制限制御を行うように構成されていてよい。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
電池
16日前
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
方法
9日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
電池
16日前
トヨタ自動車株式会社
電池
20日前
トヨタ自動車株式会社
電池
19日前
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
モータ
16日前
トヨタ自動車株式会社
電動車
16日前
トヨタ自動車株式会社
負極層
16日前
トヨタ自動車株式会社
電動車
13日前
トヨタ自動車株式会社
モータ
20日前
トヨタ自動車株式会社
報知装置
13日前
トヨタ自動車株式会社
制御装置
16日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
路側装置
16日前
トヨタ自動車株式会社
蓄電装置
16日前
トヨタ自動車株式会社
蓄電装置
16日前
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
駆動装置
16日前
トヨタ自動車株式会社
充電装置
16日前
トヨタ自動車株式会社
制御装置
13日前
トヨタ自動車株式会社
送電装置
5日前
トヨタ自動車株式会社
スペーサ
13日前
トヨタ自動車株式会社
蓄電装置
5日前
トヨタ自動車株式会社
路側装置
9日前
トヨタ自動車株式会社
路側装置
9日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ