TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025123340
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2025098454,2024034510
出願日
2025-06-12,2018-08-30
発明の名称
情報処理装置、地図生成装置、記憶装置、制御方法及びプログラム
出願人
パイオニア株式会社
代理人
個人
主分類
G01C
21/32 20060101AFI20250815BHJP(測定;試験)
要約
【課題】正確な位置推定を好適に実現する。
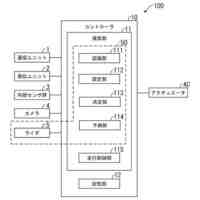
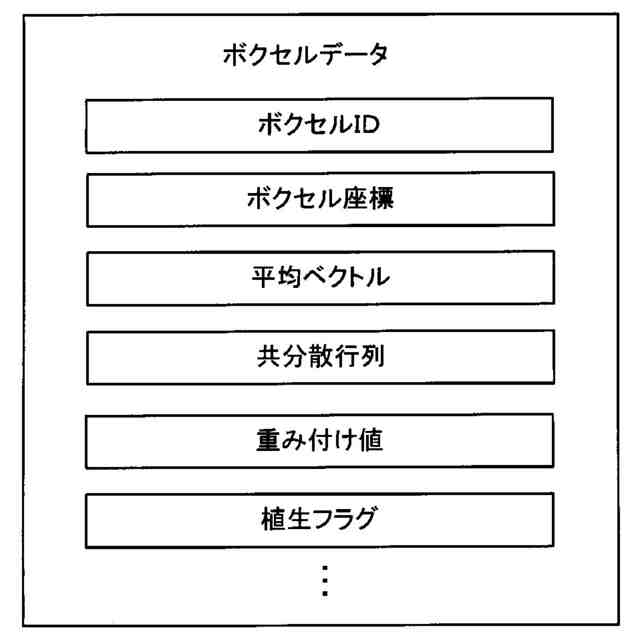
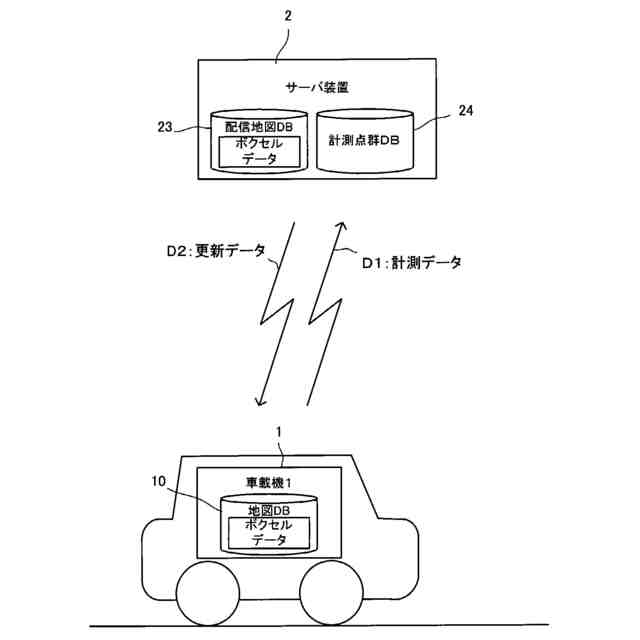
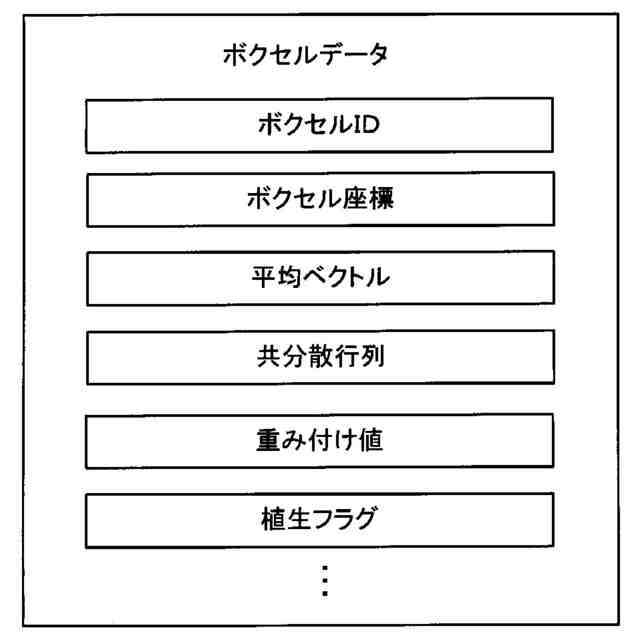
【解決手段】地図データのデータ構造は、空間を区切ったボクセルごとに、物体表面の位置に関する平均ベクトル及び共分散行列等と、当該物体を示す情報を位置推定に用いる際の重みに関する重み付け値とを含み、植生ボクセルBvに対する重み付け値は、植生を含まないボクセルに対する重み付け値よりも低い値に設定される。そして、このデータ構造を有する地図データは、車両に搭載されたライダ30等の計測装置が計測した物体の計測情報と、ボクセルデータとの照合結果を、ボクセルごとに重み付けを行うことで、車両の位置を推定する車載機1により参照される。
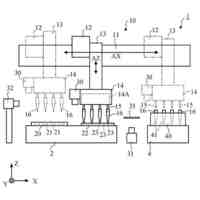
【選択図】図3
特許請求の範囲
【請求項1】
空間を区切った領域ごとに、
物体を示す情報と、
当該物体を示す情報の位置推定における信頼度を表す重みに関する情報と、を含み、
植生を含む領域に対する前記重みは、植生を含まない植生以外の構造物の領域に対する前記重みよりも低い値に設定される地図データを記憶する記憶手段と、
移動体に搭載された計測装置が計測した物体の計測情報と、前記領域ごとの前記物体を示す情報との照合結果を、前記領域ごとに重み付けを行うことで、前記移動体の位置を推定する推定手段と、
を有する情報処理装置。
続きを表示(約 1,200 文字)
【請求項2】
前記物体を示す情報は、前記領域の各々における前記物体の表面の点群の平均及び分散に関する情報であり、
前記情報処理装置は、前記物体の計測情報と、前記平均、前記分散、及び前記重みとに基づき、前記照合に関する評価値を算出する請求項1に記載の情報処理装置。
【請求項3】
前記植生を含む領域は、当該領域内の物体の計測点に基づき当該物体が柱状体又は平面のいずれにも該当しないと判定された領域である請求項1または2に記載の情報処理装置。
【請求項4】
空間を区切った領域であって、計測装置が計測した物体の計測点を含む領域から、植生の計測点を含む領域を認識する認識手段と、
前記領域ごとの前記物体を示す情報と、当該位置に関する情報の位置推定における信頼度を表す重みとを関連付けた地図データを生成する地図生成手段と、を備え、
前記地図生成手段は、前記植生を含む領域に対する前記重みを、前記植生を含まない植生以外の構造物の領域に対する前記重みよりも小さくする地図生成装置。
【請求項5】
空間を区切った領域ごとに、
物体を示す情報と、
当該物体を示す情報の位置推定における信頼度を表す重みに関する情報と、を含み、
植生を含む領域に対する前記重みは、植生を含まない植生以外の構造物の領域に対する前記重みよりも低い値に設定される地図データを記憶する記憶手段を有する記憶装置。
【請求項6】
空間を区切った領域ごとに、
物体を示す情報と、
当該物体を示す情報の位置推定における信頼度を表す重みに関する情報と、を含み、
植生を含む領域に対する前記重みは、植生を含まない植生以外の構造物の領域に対する前記重みよりも低い値に設定される地図データを参照するコンピュータが実行する制御方法であって、
移動体に搭載された計測装置が計測した物体の計測情報と、前記領域ごとの前記物体を示す情報との照合結果を、前記領域ごとに重み付けを行うことで、前記移動体の位置を推定する推定工程
を有する制御方法。
【請求項7】
空間を区切った領域ごとに、
物体を示す情報と、
当該物体を示す情報の位置推定における信頼度を表す重みに関する情報と、を含み、
植生を含む領域に対する前記重みは、植生を含まない植生以外の構造物の領域に対する前記重みよりも低い値に設定される地図データを参照するコンピュータに実行させるプログラムであって、
移動体に搭載された計測装置が計測した物体の計測情報と、前記領域ごとの前記物体を示す情報との照合結果を、前記領域ごとに重み付けを行うことで、前記移動体の位置を推定する推定手段
として前記コンピュータを機能させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、位置推定に用いられる地図データに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
従来から、レーザスキャナなどの計測装置を用いて計測した周辺物体の形状データを、予め周辺物体の形状が記憶された地図データとマッチングすることで、車両の自己位置を推定する技術が知られている。例えば、特許文献1には、空間を所定の規則で分割したボクセル中における検出物が静止物か移動物かを判定し、静止物が存在するボクセルを対象として地図データと計測データとのマッチングを行う自律移動システムが開示されている。また、非特許文献1には、ライダなどから得られた計測点群を解析することで、木などの植生を構成する計測点群を認識する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
国際公開WO2013/076829
【非特許文献】
【0004】
Fabrice Monnier, Bruno Vallet, Bahman Soheilian, TREES DETECTION FROM LASER POINT CLOUDS ACQUIRED IN DENSE URBAN AREAS BY A MOBILE MAPPING SYSTEM, [online], 2012, ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, [平成30年7月14日検索], インターネット〈URL:https://www.isprs-ann-photogramm-remote-sens-spatial-inf-sci.net/I-3/245/2012/isprsannals-I-3-245-2012.pdf〉
【発明の概要】
【発明が解決しようとする課題】
【0005】
ボクセルにより表現された地図データを用いた位置推定において、時間の経過により変化する植生を含むボクセルを参照して位置推定を行った場合、位置推定結果にずれが生じる可能性がある。
【0006】
本発明は、上記のような課題を解決するためになされたものであり、正確な位置推定を好適に実現することを主な目的とする。
【課題を解決するための手段】
【0007】
請求項に記載の発明は、空間を区切った領域ごとに、物体を示す情報と、当該物体を示す情報の位置推定における信頼度を表す重みに関する情報と、を含み、植生を含む領域に対する前記重みは、植生を含まない植生以外の構造物の領域に対する前記重みよりも低い値に設定される地図データを記憶する記憶手段と、移動体に搭載された計測装置が計測した物体の計測情報と、前記領域ごとの前記物体を示す情報との照合結果を、前記領域ごとに重み付けを行うことで、前記移動体の位置を推定する推定手段と、を有する情報処理装置である。
また、請求項に記載の発明は、空間を区切った領域であって、計測装置が計測した物体の計測点を含む領域から、植生の計測点を含む領域を認識する認識手段と、前記領域ごとの前記物体を示す情報と、当該位置に関する情報の位置推定における信頼度を表す重みとを関連付けた地図データを生成する地図生成手段と、を備え、前記地図生成手段は、前記植生を含む領域に対する前記重みを、前記植生を含まない植生以外の構造物の領域に対する前記重みよりも小さくする地図生成装置である。
【0008】
また、請求項に記載の発明は、記憶装置であって、空間を区切った領域ごとに、物体を示す情報と、当該物体を示す情報の位置推定における信頼度を表す重みに関する情報と、を含み、植生を含む領域に対する前記重みは、植生を含まない植生以外の構造物の領域に対する前記重みよりも低い値に設定される地図データを記憶する記憶手段を有する。
また、請求項に記載の発明は、空間を区切った領域ごとに、物体を示す情報と、当該物体を示す情報の位置推定における信頼度を表す重みに関する情報と、を含み、植生を含む領域に対する前記重みは、植生を含まない植生以外の構造物の領域に対する前記重みよりも低い値に設定される地図データを参照するコンピュータが実行する制御方法であって、移動体に搭載された計測装置が計測した物体の計測情報と、前記領域ごとの前記物体を示す情報との照合結果を、前記領域ごとに重み付けを行うことで、前記移動体の位置を推定する推定工程を有する。
また、請求項に記載の発明は、空間を区切った領域ごとに、物体を示す情報と、当該物体を示す情報の位置推定における信頼度を表す重みに関する情報と、を含み、植生を含む領域に対する前記重みは、植生を含まない植生以外の構造物の領域に対する前記重みよりも低い値に設定される地図データを参照するコンピュータに実行させるプログラムであって、移動体に搭載された計測装置が計測した物体の計測情報と、前記領域ごとの前記物体を示す情報との照合結果を、前記領域ごとに重み付けを行うことで、前記移動体の位置を推定する推定手段として前記コンピュータを機能させる。
【図面の簡単な説明】
【0009】
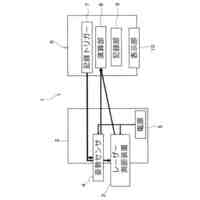
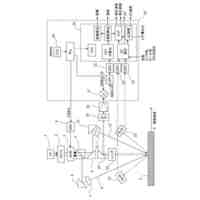
地図更新システムの概略構成である。
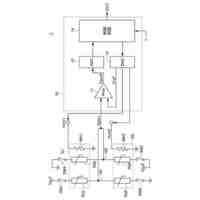
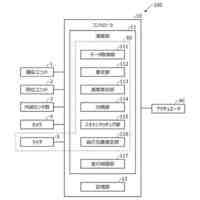
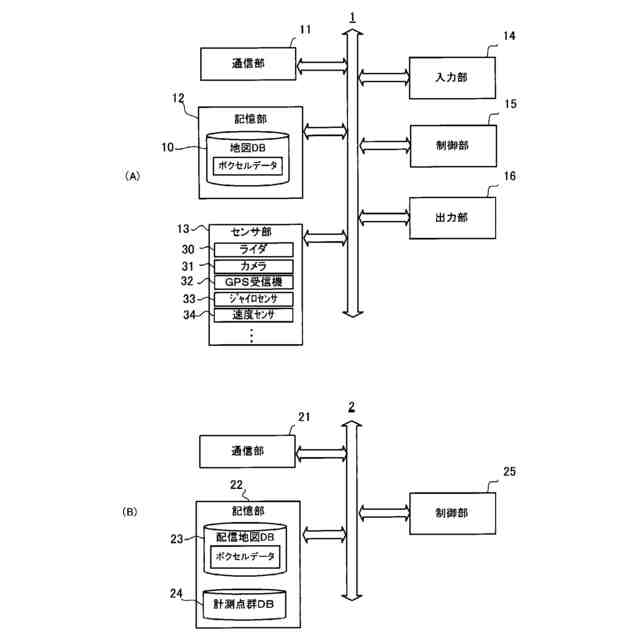
車載機及びサーバ装置のブロック構成を示す。
ボクセルデータの概略的なデータ構造の一例を示す。
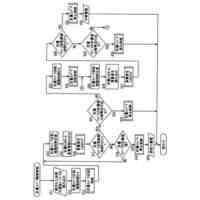
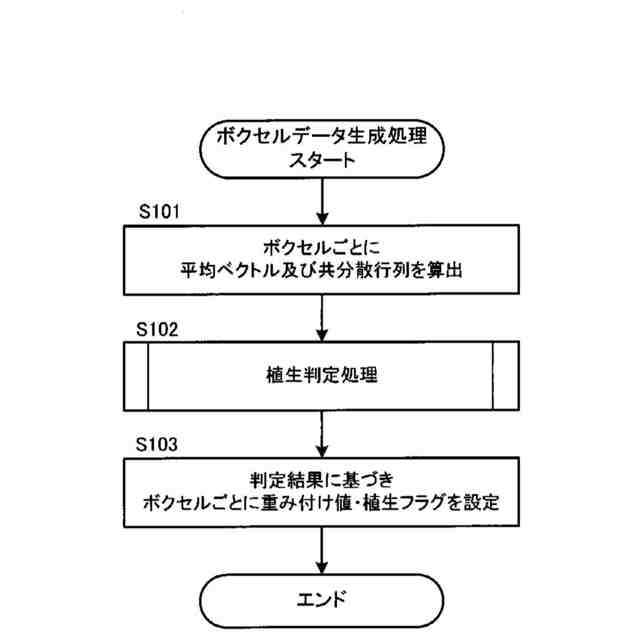
ボクセルデータ生成処理の手順を示すフローチャートである。
植生判定処理の手順を示すフローチャートである。
位置推定処理の手順を示すフローチャートである。
第1実施例に基づく位置推定と、比較例に基づく位置推定との処理の概要を示す図である。
第2実施例に係るボクセルデータの概略的なデータ構造の一例を示す。
第2実施例に係るボクセルデータ生成処理の手順を示すフローチャートである。
第2実施例に係る動的物体検知処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0010】
本発明の好適な実施形態によれば、空間を区切った領域ごとに、物体を示す情報と、当該物体を示す情報を位置推定に用いる際の重みに関する情報と、を含み、植生を含む領域に対する前記重みは、植生を含まない領域に対する前記重みよりも低い値に設定される地図データのデータ構造であって、移動体に搭載された計測装置が計測した物体の計測情報と、前記領域ごとの前記物体を示す情報との照合結果を、前記領域ごとに重み付けを行うことで、前記移動体の位置を推定する情報処理装置により参照される地図データのデータ構造である。「空間を区切った領域」とは、空間を所定の規則により分割した領域であり、例えば大きさが一定の直方体又は立方体である。情報処理装置は、このデータ構造を有する地図データを参照することで、植生を含む領域に対する照合結果への重み付けを相対的に低くすることができ、植生の揺れ動き等に起因した位置推定精度の低下を好適に抑制することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
微小振動検出装置
2日前
株式会社イシダ
X線検査装置
2日前
三菱電機株式会社
計測器
17日前
株式会社辰巳菱機
システム
11日前
株式会社東芝
センサ
2日前
株式会社FRPカジ
FRP装置
13日前
TDK株式会社
ガスセンサ
5日前
富士レビオ株式会社
嵌合システム
16日前
日本精工株式会社
分注装置
9日前
株式会社カワタ
サンプリング装置
6日前
株式会社精工技研
光電圧プローブ
3日前
学校法人立命館
液面レベルセンサ
10日前
大和製衡株式会社
組合せ計量装置
13日前
三菱マテリアル株式会社
温度センサ
9日前
戸田建設株式会社
測量機
9日前
株式会社豊田自動織機
自律走行車
3日前
株式会社ダイフク
搬送設備
2日前
三和テッキ株式会社
架線の高さ、偏位測定装置
11日前
大豊建設株式会社
直線精度測定装置
13日前
本田技研工業株式会社
外界認識装置
13日前
本田技研工業株式会社
位置推定装置
5日前
株式会社村田製作所
圧力センサ装置
4日前
大豊建設株式会社
鉛直精度測定装置
13日前
アクト電子株式会社
レーザドップラ速度計
13日前
株式会社エイアンドティー
電解質分析装置
9日前
本田技研工業株式会社
物体検出装置
9日前
株式会社国際電気
監視システム
4日前
株式会社エス・テイ・ジャパン
試料加工部材
9日前
三浦工業株式会社
ダイオキシン類の分画方法
5日前
株式会社キリウ
溶湯液位測定装置
9日前
住友ゴム工業株式会社
脱輪抑止システム
6日前
株式会社ケー・エフ・シー
防水シート検査装置
4日前
レーザーテック株式会社
計測装置及び計測方法
5日前
株式会社吉匠建築工藝
建築物の測量方法
3日前
ローム株式会社
電流センサ
12日前
アルプスアルパイン株式会社
磁界検出装置
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ