TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025112138
公報種別
公開特許公報(A)
公開日
2025-07-31
出願番号
2024006244
出願日
2024-01-18
発明の名称
投受光装置、測距装置、測距システムおよびプログラム
出願人
株式会社リコー
代理人
弁理士法人酒井国際特許事務所
主分類
G01S
7/484 20060101AFI20250724BHJP(測定;試験)
要約
【課題】測距対象のシーンに合わせた柔軟な撮影を可能とする。
【解決手段】第1の光及び第2の光を投光する投光部と、前記第1の光が物体で反射された第1反射光と、前記第2の光が物体で反射された第2反射光と、を受光する受光部と、前記投光部及び前記受光部を制御する制御部と、を備え、前記第1の光及び前記第2の光は、それぞれ、ピーク領域を持つ光強度の分布を複数有するパターン光であり、投光される領域内の少なくとも一部に、一方のパターン光のピーク領域が他方のパターン光のピーク領域と重複しない部分を含み、前記制御部は、前記第1の光と前記第2の光を異なるタイミングで投光しそれぞれ受光する第1のモード、及び、前記第1の光と前記第2の光を同時に投光し受光する第2のモードを含む複数の投光モードから選択されたモードで、投受光を行う。
【選択図】図1
特許請求の範囲
【請求項1】
第1の光及び第2の光を投光する投光部と、
前記第1の光が物体で反射された第1反射光と、前記第2の光が物体で反射された第2反射光と、を受光する受光部と、
前記投光部及び前記受光部を制御する制御部と、を備え、
前記第1の光及び前記第2の光は、それぞれ、ピーク領域を持つ光強度の分布を複数有するパターン光であり、投光される領域内の少なくとも一部に、一方のパターン光のピーク領域が他方のパターン光のピーク領域と重複しない部分を含み、
前記制御部は、前記第1の光と前記第2の光を異なるタイミングで投光しそれぞれ受光する第1のモード、及び、前記第1の光と前記第2の光を同時に投光し受光する第2のモードを含む複数の投光モードから選択されたモードで、投受光を行う、投受光装置。
続きを表示(約 1,500 文字)
【請求項2】
前記制御部は、前記物体の動きを示す動き指標が所定の値より大きいときに、前記第2のモードを選択する、請求項1に記載の投受光装置。
【請求項3】
前記制御部は、前記動き指標が前記所定の値より大きいか否かを判定し、
前記動き指標が前記所定の値より大きいときに、前記第2のモードをユーザに提示する、請求項2に記載の投受光装置。
【請求項4】
前記制御部は、前記動き指標が前記所定の値より大きいか否かを判定し、
前記動き指標が前記所定の値以下のときに、前記第1のモードを選択して投受光を行い、
前記動き指標が前記所定の値より大きいときに、前記第2のモードを選択して投受光を行う、請求項2に記載の投受光装置。
【請求項5】
輝度受光部をさらに備え、
前記選択されたモードで投受光を行う前に、前記輝度受光部で複数回の撮影を行う、請求項1又は請求項2に記載の投受光装置。
【請求項6】
前記輝度受光部による前記複数回の撮影に基づき、前記複数の投光モードから前記モードを選択する、請求項5に記載の投受光装置。
【請求項7】
前記投光部は、
前記第1の光を出射する第1光源と、
前記第1光源と異なる回路で駆動され、前記第2の光を出射する第2光源と、を含む、請求項1に記載の投受光装置。
【請求項8】
前記投光部は、
前記第1の光を投光する第1投光光学系と、
前記第1投光光学系と異なる位置から前記第2の光を投光する第2投光光学系と、を含む、請求項1に記載の投受光装置。
【請求項9】
請求項1乃至請求項4のいずれか一項に記載の投受光装置と、
前記投受光装置から前記物体までの距離情報を計算する距離計算部と、
を備え、
前記距離計算部は、
前記第1のモードが選択されたときに、前記第1の光の投受光に基づいて算出した第1の距離情報と、前記第2の光の投受光に基づいて算出した第2の距離情報と、を統合して距離情報を計算し、
前記第2のモードが選択されたときに、前記第1の光と前記第2の光の投受光に基づいて距離情報を計算する、測距装置。
【請求項10】
物体までの距離を測定する測距システムであって、
第1の光及び第2の光を投光する投光部と、
前記第1の光が前記物体で反射された第1反射光と、前記第2の光が物体で反射された第2反射光と、を受光する受光部と、
前記投光部及び前記受光部を制御する制御部と、
前記測距システムから前記物体までの距離情報を計算する距離計算部と、
を備え、
前記第1の光及び前記第2の光は、それぞれ、ピーク領域を持つ光強度の分布を複数有するパターン光であり、投光される領域内の少なくとも一部に、一方のパターン光のピーク領域が他方のパターン光のピーク領域と重複しない部分を含み、
前記制御部は、前記第1の光と前記第2の光を異なるタイミングで投光しそれぞれ受光する第1のモード、及び、前記第1の光と前記第2の光を同時に投光し受光する第2のモードを含む複数の投光モードから選択されたモードで、投受光を行い、
前記距離計算部は、
前記第1のモードが選択されたときに、前記第1の光の投受光に基づいて算出した第1の距離情報と、前記第2の光の投受光に基づいて算出した第2の距離情報と、を統合して距離情報を計算し、
前記第2のモードが選択されたときに、前記第1の光と前記第2の光の投受光に基づいて距離情報を計算する、測距システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、投受光装置、測距装置、測距システムおよびプログラムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来、対象物までの測距の手法の一つに、ToF(Time of Flight)方式と呼ばれる手法が知られている。ToF方式を用いた測距装置であるToFカメラは、所定の照射パターンにより強度変調された赤外光による測距光を対象物に向けて照射した後、対象物によって反射された測距光を赤外線用の撮像素子で受光する。そして、ToFカメラは、照射パターンにより照射から受光までの時間差を画素ごとに検出、距離を算出する。ToFカメラは、算出した距離値を画素ごとにビットマップ状に集めて、“距離画像”として保存する。
【0003】
特許文献1には、少なくとも1つの光源とディフューザとを含み、第1照明パターンを投影するように構成されている投光照明器と、第2照明パターンを投影するように構成されているドットパターンプロジェクタと、物体から反射された照明パターンの画像を撮影するように構成されている画像撮影デバイスと、を備える光学距離測定システムが開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の光学測距測定システムによれば、測距対象のシーンに合わせた柔軟な撮影を行うことができないという課題があった。
【0005】
本発明は、上記に鑑みてなされたものであって、測距対象のシーンに合わせた柔軟な撮影を可能とすることを目的とする。
【課題を解決するための手段】
【0006】
第1の光及び第2の光を投光する投光部と、前記第1の光が物体で反射された第1反射光と、前記第2の光が物体で反射された第2反射光と、を受光する受光部と、前記投光部及び前記受光部を制御する制御部と、を備え、前記第1の光及び前記第2の光は、それぞれ、ピーク領域を持つ光強度の分布を複数有するパターン光であり、投光される領域内の少なくとも一部に、一方のパターン光のピーク領域が他方のパターン光のピーク領域と重複しない部分を含み、前記制御部は、前記第1の光と前記第2の光を異なるタイミングで投光しそれぞれ受光する第1のモード、及び、前記第1の光と前記第2の光を同時に投光し受光する第2のモードを含む複数の投光モードから選択されたモードで、投受光を行う。
【発明の効果】
【0007】
本発明によれば、測距対象のシーンに合わせた柔軟な撮影を可能とする、という効果を奏する。
【図面の簡単な説明】
【0008】
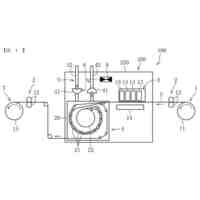
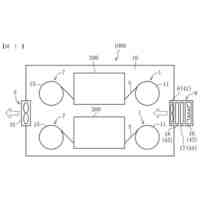
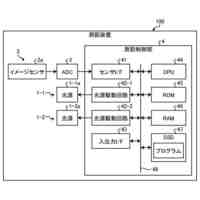
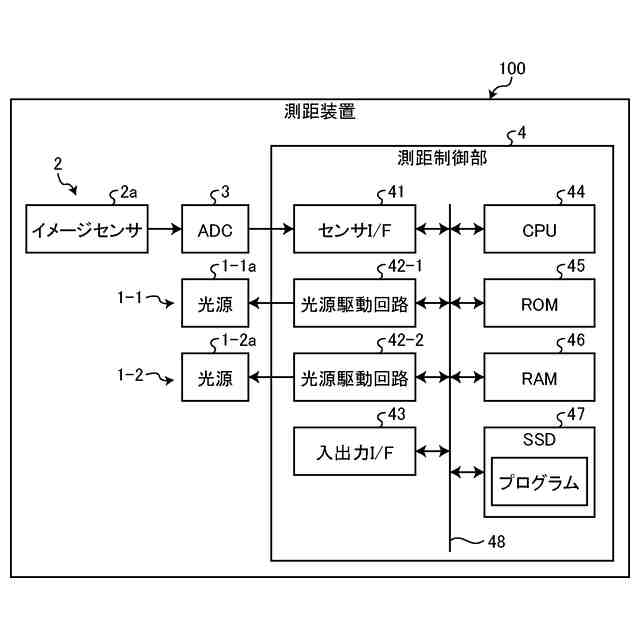
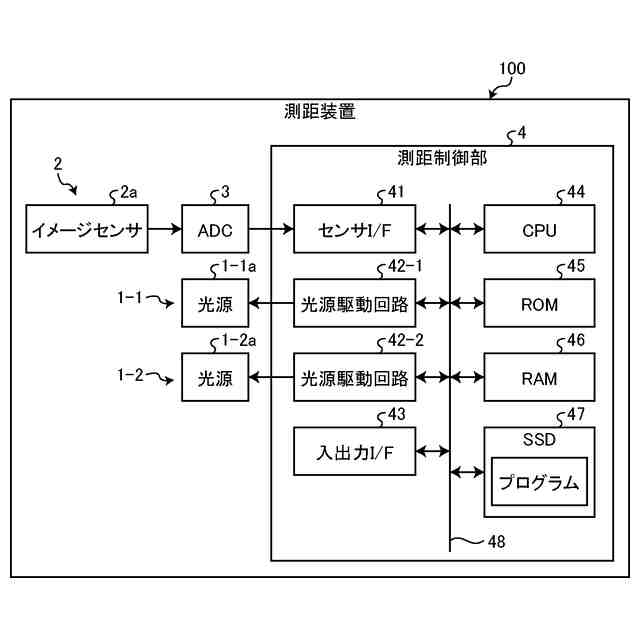
図1は、第1の実施の形態にかかる投受光装置を備えた測距装置のハードウェア構成を示すブロック図である。
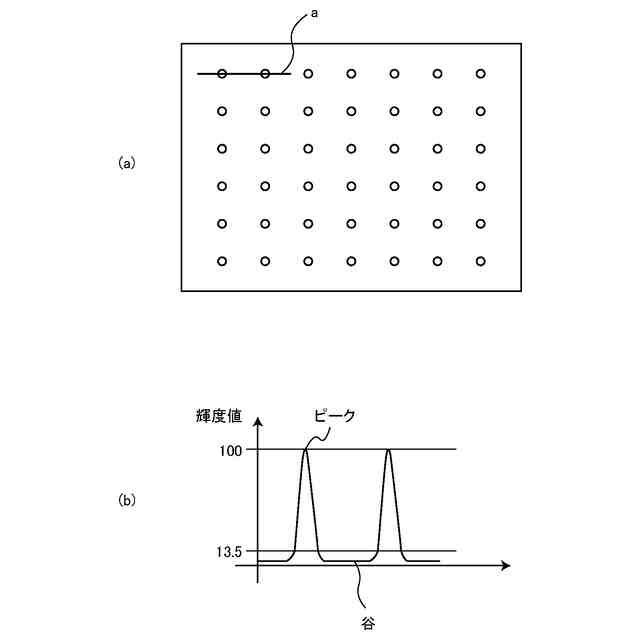
図2は、複数の点状光からなるパターン光を例示的に示す図である。
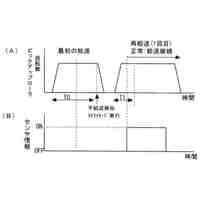
図3は、測距原理を説明するためのタイミングチャートである。
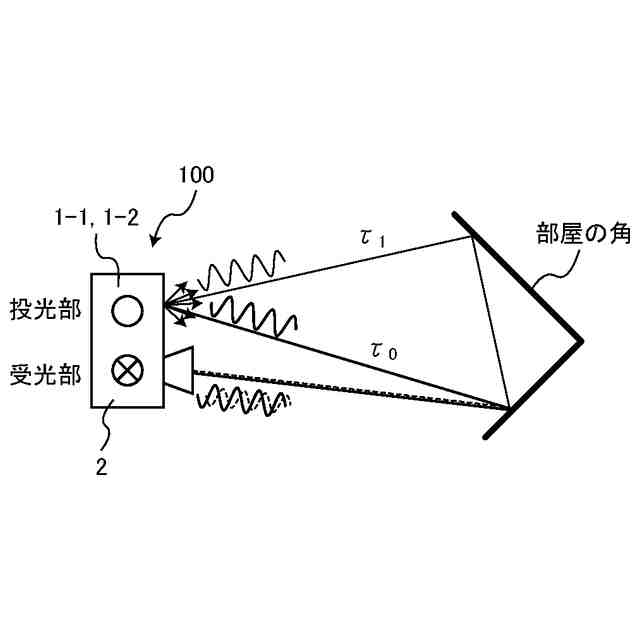
図4は、ToFカメラでマルチパス干渉によるノイズが発生する原理を示す図である。
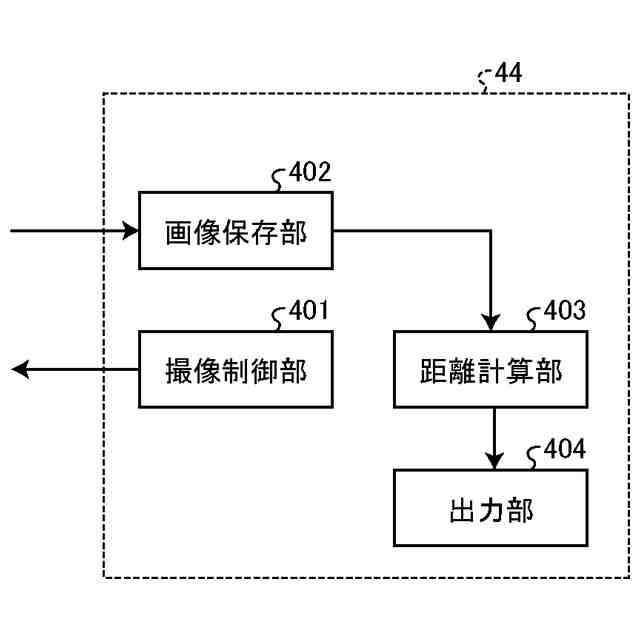
図5は、測距制御部の機能構成を示す機能ブロック図である。
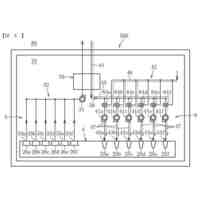
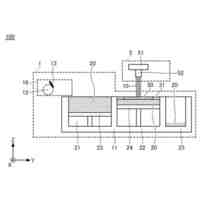
図6は、測距装置の投光系および受光系を示す図である。
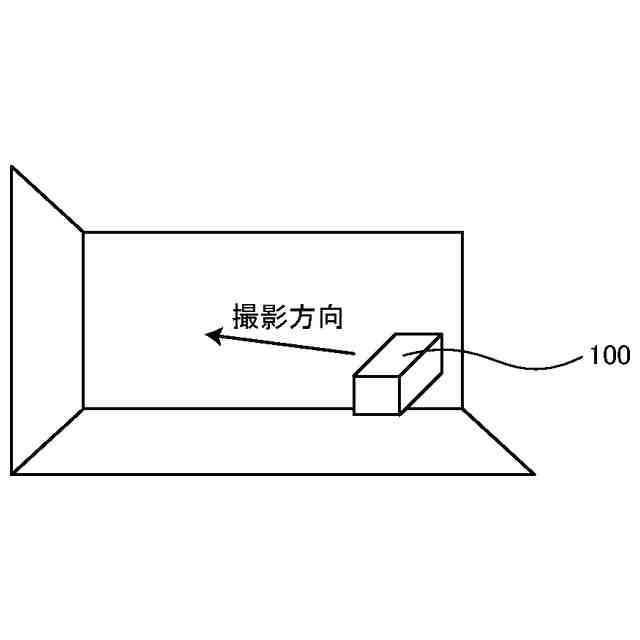
図7は、測距装置の設置例を示す図である。
図8は、マルチパス干渉の影響を例示的に示す図である。
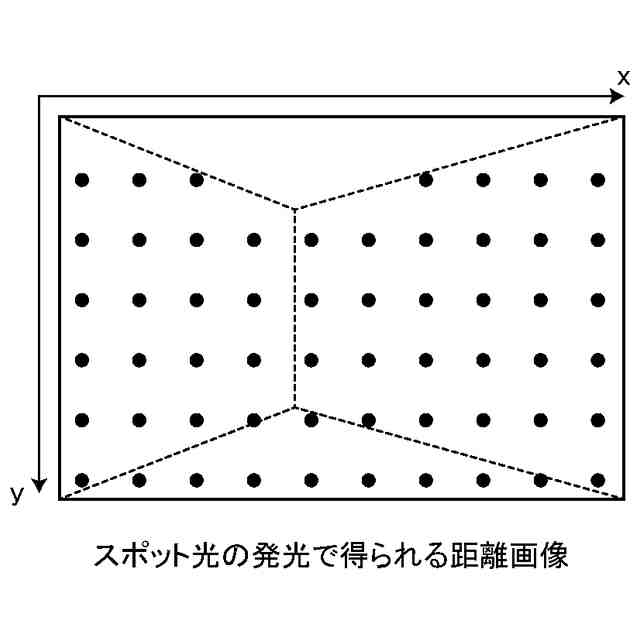
図9は、距離画像の例を示す図である。
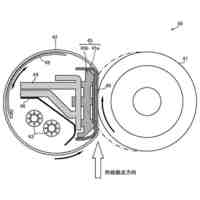
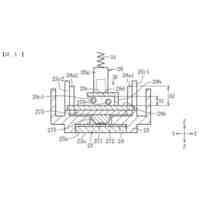
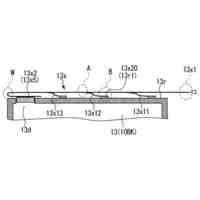
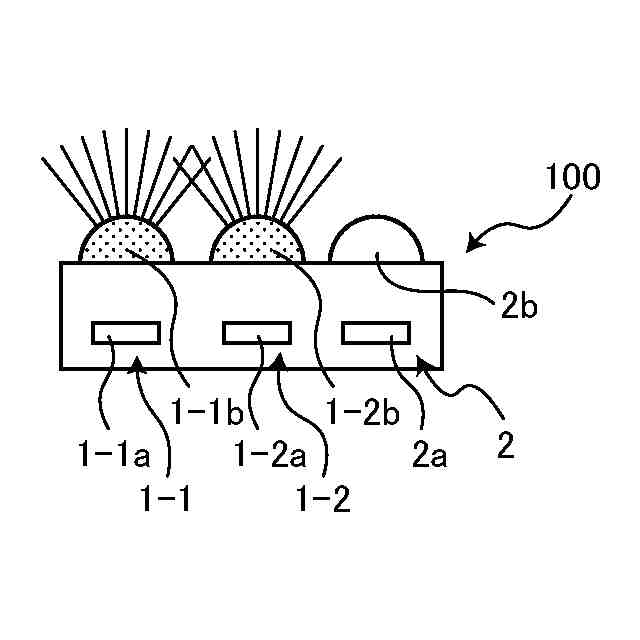
図10は、投受光装置の投光系の周囲の断面図である。
図11は、2つの投光部から照射されるパターン光の関係を示す図である。
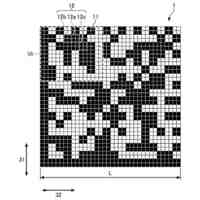
図12は、投光部から照射されるパターン光の例を示す図である。
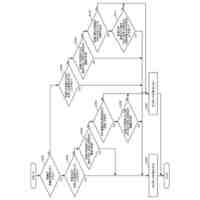
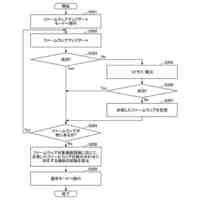
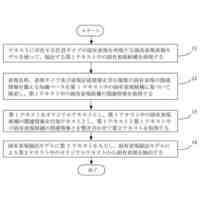
図13は、第1のモードにおける距離画像の取得手順を示すフローチャートである。
図14は、第2のモードにおける距離画像の取得手順を示すフローチャートである。
図15は、第1のモードで動く人物を撮影して取得した距離画像の例を示す図である。
図16は、第1の実施の形態の変形例のハードウェア構成を示すブロック図である。
図17は、推奨モードの提示の機能構成を示す機能ブロック図である。
図18は、推奨モードを計算する手順を示すフローチャートである。
図19は、推奨モードの提示の他の機能構成を示す機能ブロック図である。
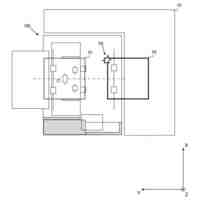
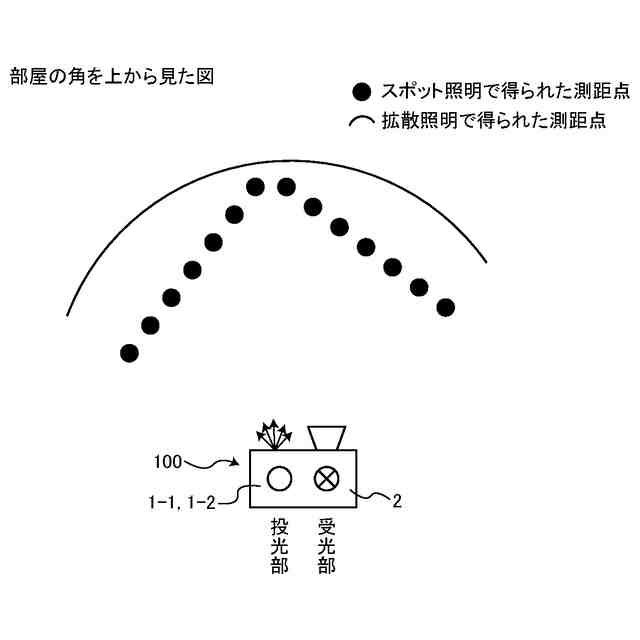
図20は、測距対象のシーンを上から見た平面図である。
図21は、測距装置(撮像装置)含む測距システムのシステム構成を示すブロック図である。
図22は、互いに異なる点状光の位置を持つパターン光の例を示す図である。
図23は、測距装置の他の構成例を示す図である。
図24は、第2の実施の形態にかかる測距装置の投光系および受光系を示す図である。
図25は、距離画像の例を示す図である。
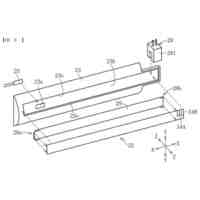
図26は、第3の実施の形態にかかる測距装置の構成を示す外観斜視図である。
図27は、測距装置の概略構成の一例を示す図である。
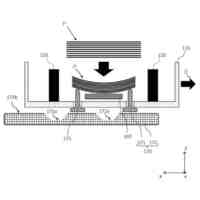
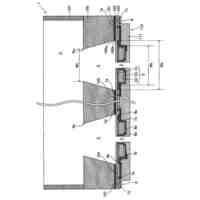
図28は、光学系の配置の一例を示す図である。
図29は、第2投光ユニットが投光するパターン光の照射範囲を示す図である。
図30は、第1のモードにおける距離画像の取得手順を示すフローチャートである。
図31は、測距装置を、使用者の認証を行う電子情報端末に適用した例を示す図である。
図32は、測距装置を、自立走行システムに適用した例を示す図である。
図33は、測距装置を、物品検査システムに適用した例を示す図である。
図34は、測距装置を、稼働機器に適用した例を示す図である。
図35は、測距装置を、運転支援システムに適用した例を示す図である。
【発明を実施するための形態】
【0009】
以下に添付図面を参照して、投受光装置、測距装置、測距システムおよびプログラムの実施の形態を詳細に説明する。
【0010】
(第1の実施の形態)
図1は、第1の実施の形態にかかる投受光装置を備えた測距装置100のハードウェア構成を示すブロック図である。撮像装置としても機能する測距装置100は、測距装置100から対象物までの測距を行う。測距装置100は、光を照射してから反射光を受光するまでの時間に基づき対象物までの距離を算出するToF(Time of Flight)カメラである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社リコー
画像形成装置
3日前
株式会社リコー
画像形成装置
6日前
株式会社リコー
印刷装置及び印刷方法
3日前
株式会社リコー
炭素繊維含有樹脂組成物
3日前
株式会社リコー
定着装置及び画像形成装置
1日前
株式会社リコー
電源装置及び画像形成装置
8日前
株式会社リコー
検査装置および液体吐出装置
7日前
株式会社リコー
媒体供給装置及び画像形成装置
1日前
株式会社リコー
押圧ローラ、及び、画像形成装置
7日前
株式会社リコー
加熱装置、定着装置、画像形成装置
9日前
株式会社リコー
加熱装置、定着装置、画像形成装置
今日
株式会社リコー
液付与システム及び排気量制御方法
7日前
株式会社リコー
シート処理装置及び画像形成システム
6日前
株式会社リコー
シート給送装置、及び、画像形成装置
2日前
株式会社リコー
加熱装置、定着装置及び画像形成装置
1日前
株式会社リコー
画像読取装置、プログラム、案内方法
16日前
株式会社リコー
液体吐出ヘッド及び液体を吐出する装置
3日前
株式会社リコー
廃トナー回収装置、及び、画像形成装置
7日前
株式会社リコー
画像形成方法、及び電子部品の製造方法
2日前
株式会社リコー
投光装置、投受光装置及び測距システム
3日前
株式会社リコー
液体吐出ヘッド及び液体を吐出する装置
3日前
株式会社リコー
機器、プログラム更新方法、プログラム
7日前
株式会社リコー
情報処理システム、出力方法、プログラム
2日前
株式会社リコー
画像形成装置及び転写残トナーの回収方法
今日
株式会社リコー
情報処理装置、情報処理方法及びプログラム
3日前
株式会社リコー
給排気装置、給排気システム及び給排気方法
2日前
株式会社リコー
積層体の製造方法、及び電気化学素子の製造方法
15日前
株式会社リコー
設備機器の制御システム及び設備機器の制御方法
2日前
株式会社リコー
インク、インク収容容器、印刷装置及び印刷方法
今日
株式会社リコー
情報処理システム、情報処理装置およびプログラム
1日前
株式会社リコー
点群処理システム、点群処理方法およびプログラム
7日前
株式会社リコー
厚み検知装置、シート処理装置及び画像形成システム
7日前
株式会社リコー
固有表現抽出方法、固有表現抽出装置及びプログラム
21日前
株式会社リコー
シート状封止部材、着脱ユニット、及び、画像形成装置
13日前
株式会社リコー
投受光装置、測距装置、測距システムおよびプログラム
7日前
株式会社リコー
立体造形物の製造方法及び製造装置、並びに造形システム
2日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ