TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025110550
公報種別
公開特許公報(A)
公開日
2025-07-29
出願番号
2024004442
出願日
2024-01-16
発明の名称
ワーク搬送装置および加工装置
出願人
株式会社ディスコ
代理人
弁理士法人東京アルパ特許事務所
主分類
H01L
21/677 20060101AFI20250722BHJP(基本的電気素子)
要約
【課題】板状ワークの搬送およびIDの読み取りのための撮像の回数を減らす。
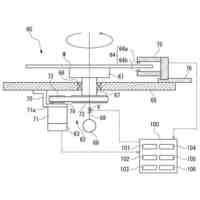
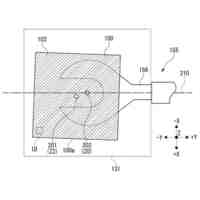
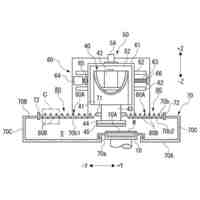
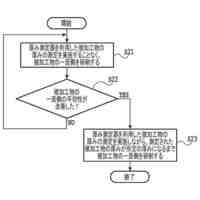
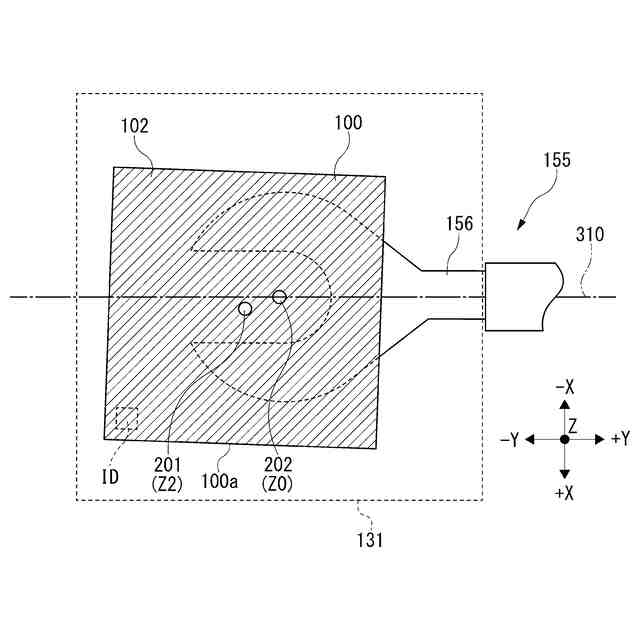
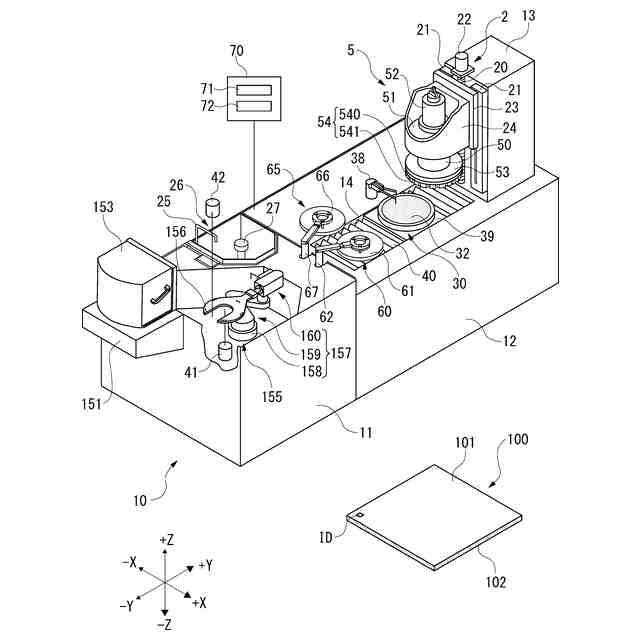
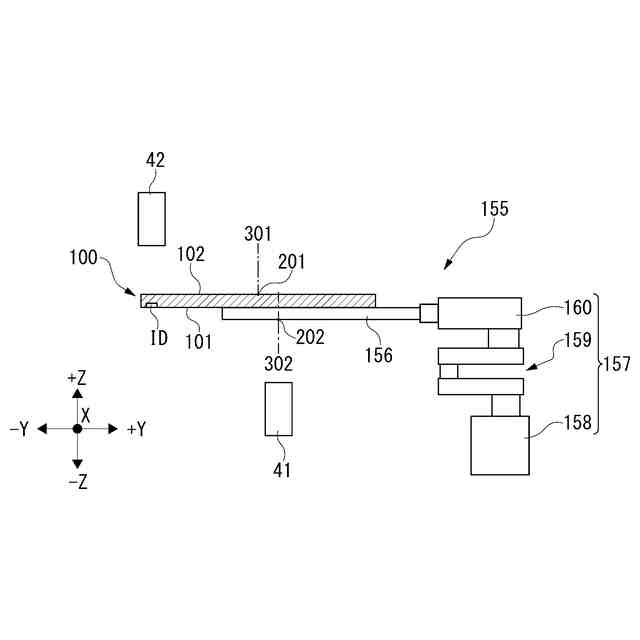
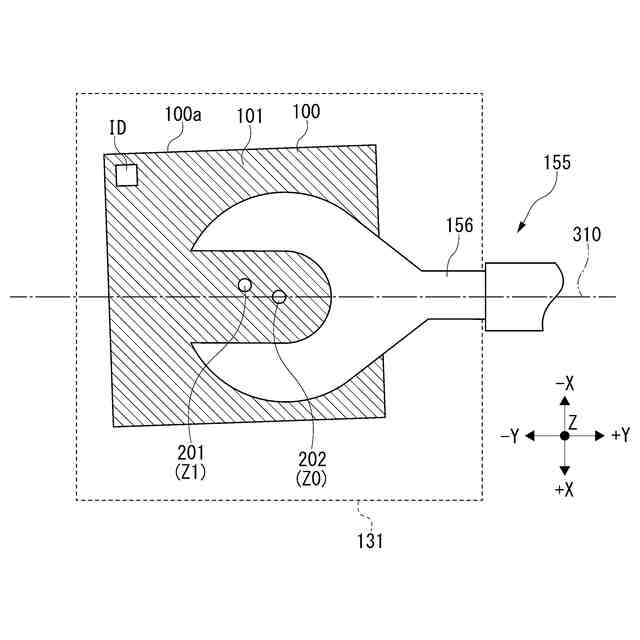
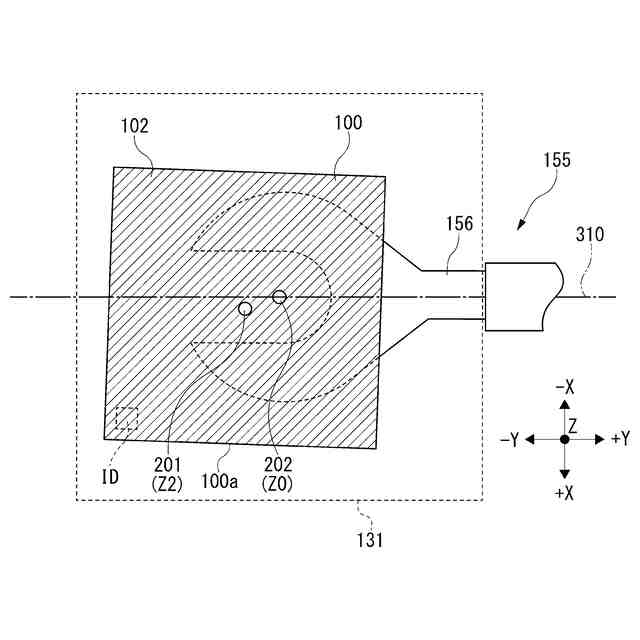
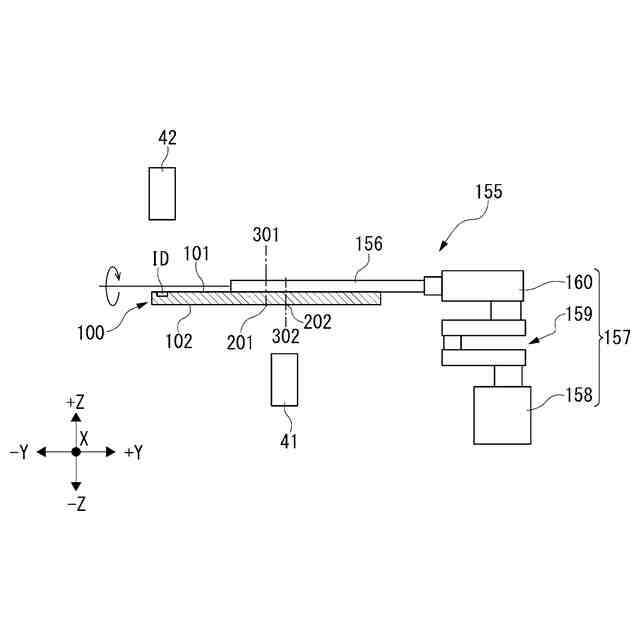
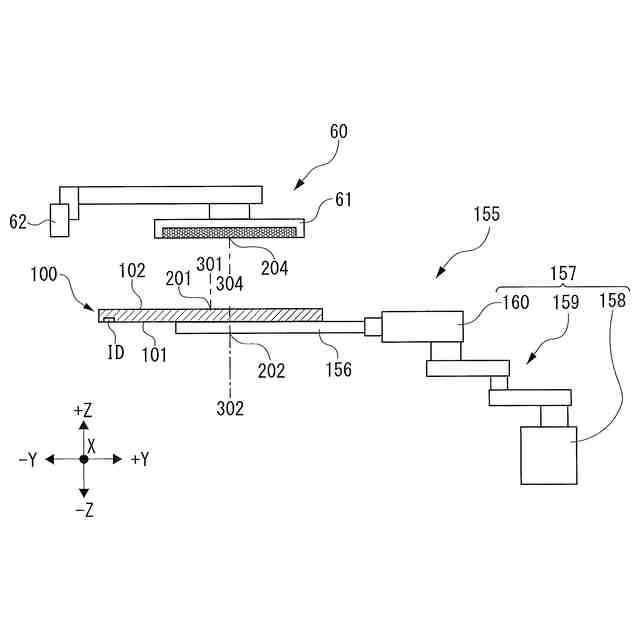
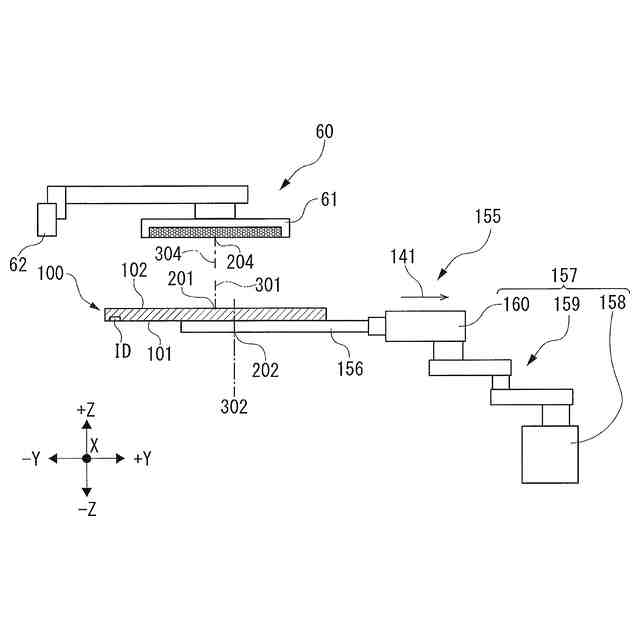
【解決手段】カメラの撮像画から得られるワークの中心座標(第1中心座標)に基づいて、保持パッド156を反転させた場合におけるワーク100の中心座標(第2中心座標Z2)を取得し、制御手段が、この第2中心座標Z2に基づいて、保持パッド156に保持されたワーク100のIDを、IDリーダーの読み取り領域に位置付けている。したがって、ワーク100を適切に搬送するために撮像された撮像画に基づいて、IDを読み取るためのワーク100の位置制御をも実施することができる。このため、IDの読み取りのための別の撮像を実施する必要がないので、ワーク100の適切な搬送およびIDの読み取りを実施するための撮像の回数を減らすことが可能となる。
【選択図】図5
特許請求の範囲
【請求項1】
板状ワークを搬送するワーク搬送装置であって、
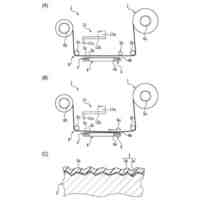
該板状ワークを保持する保持パッドを有し、該保持パッドの上面と下面とを反転可能なロボットハンドと、
該保持パッドに保持された該板状ワークのIDを読み取るID読み取り手段と、
該保持パッドに保持された該板状ワークを撮像して撮像画を取得する撮像手段と、
該撮像画に基づいて、該保持パッドに保持された該板状ワークの第1の座標情報を取得する第1座標情報取得手段と、
該第1の座標情報に基づいて、該板状ワークを保持している該保持パッドを反転させた場合における該板状ワークの第2の座標情報を取得する第2座標情報取得手段と、
該第1の座標情報または該第2の座標情報に基づいて、該ロボットハンドを制御して、該保持パッドに保持された該板状ワークのIDを該ID読み取り手段の読み取り領域に位置付ける制御手段と、
を備えることを特徴とするワーク搬送装置。
続きを表示(約 340 文字)
【請求項2】
該制御手段は、該撮像画に基づいて、該保持パッドに保持された該板状ワークの角度が予め設定された基準範囲から外れる場合に、該保持パッドに保持された該板状ワークの角度を該基準範囲内となるように補正した上で、該第2の座標情報に基づいて、該保持パッドに保持された該板状ワークのIDを該ID読み取り手段の撮像領域に位置付けることを特徴とする、
請求項1に記載のワーク搬送装置。
【請求項3】
請求項1または2に記載のワーク搬送装置と、
該板状ワークの被加工面を露出させるように該板状ワークを保持するチャックテーブルと、
該チャックテーブルに保持された該板状ワークの被加工面を加工する加工手段と、
を備えている加工装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ワーク搬送装置および加工装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
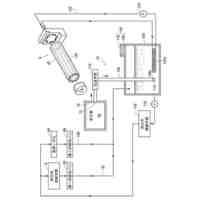
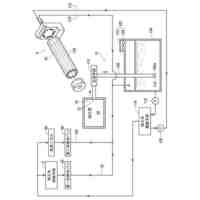
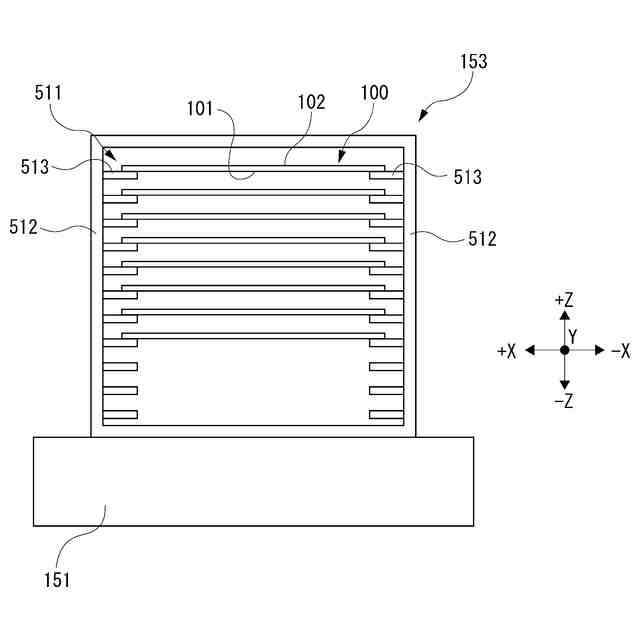
チャックテーブルで保持された板状ワークを研削砥石で研削する研削装置では、ロボットハンドによってカセットから板状ワークを取り出して仮置きテーブルに仮置きし、仮置きテーブル上で板状ワークの中心位置を検出する。その後、搬送パッドが、板状ワークをチャックテーブルまで搬送し、板状ワークの中心とチャックテーブルの中心とが一致するように、板状ワークをチャックテーブルに載置している(特許文献1)。
【0003】
しかし、このような仮置きテーブルを用いた中心位置の検出方法では、仮置きテーブルで板状ワークを持ち替えているため、持ち替えのための時間が発生している。また、板状ワークを持ち替えるために、板状ワークと仮置きテーブルとが接触するので、板状ワークにゴミが付着したり、板状ワークが破損したりすることがある。
【0004】
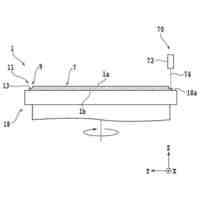
そこで、ロボットハンドに保持された板状ワークを一方の面からカメラで撮像し、撮像画から板状ワークの中心位置を検出する加工装置が提案されている(特許文献2)。これにより、板状ワークを搬送する際、たとえば板状ワークが矩形状の場合には、角度補正まで含んだアライメントを行うことが可能となる。
【先行技術文献】
【特許文献】
【0005】
特開2021-61363号公報
特開2021-114493号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
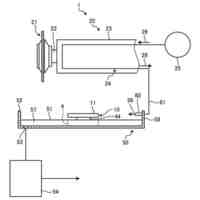
ところで、板状ワークには、個体識別番号であるIDが表面あるいは裏面に印字されているものがある。このIDを加工装置上のID読み取り用カメラで読み取ることで、加工履歴の記録や、任意の加工条件との紐付けが行われる。
【0007】
ここで、特許文献2に開示される加工装置を用いてロボットハンドに保持された板状ワークのIDを読み取る場合、板状ワークがロボットハンドに保持される面は定められている一方、IDの印字面が板状ワークの表面となるか裏面となるかは、板状ワークにより異なる。このため、必要に応じて、ID印字面がID読み込み用カメラ側に向くように、ロボットハンドを反転させることになる。
【0008】
このとき、ロボットハンドの反転前後で、板状ワークの中心位置および角度が変わるので、板状ワークに印字されているIDをID読み取りカメラの撮像領域に精確に位置付けるためには、ロボットハンドの反転後に、再度の撮像を実施して板状ワークの中心位置を検出する必要がある。このため、ロボットハンドの反転前後のそれぞれで撮像を実施するため、効率が落ちる。
【0009】
したがって、本発明の目的は、板状ワークの搬送およびIDの読み取りのための撮像の回数を減らすことにある。
【課題を解決するための手段】
【0010】
本発明のワーク搬送装置(本ワーク搬送装置)は、板状ワークを搬送するワーク搬送装置であって、該板状ワークを保持する保持パッドを有し、該保持パッドの上面と下面とを反転可能なロボットハンドと、該保持パッドに保持された該板状ワークのIDを読み取るID読み取り手段と、該保持パッドに保持された該板状ワークを撮像して撮像画を取得する撮像手段と、該撮像画に基づいて、該保持パッドに保持された該板状ワークの第1の座標情報を取得する第1座標情報取得手段と、該第1の座標情報に基づいて、該板状ワークを保持している該保持パッドを反転させた場合における該板状ワークの第2の座標情報を取得する第2座標情報取得手段と、該第1の座標情報または該第2の座標情報に基づいて、該ロボットハンドを制御して、該保持パッドに保持された該板状ワークのIDを該ID読み取り手段の読み取り領域に位置付ける制御手段と、を備えることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ディスコ
処理装置
23日前
株式会社ディスコ
加工装置
1か月前
株式会社ディスコ
研削装置
2日前
株式会社ディスコ
固定機構
8日前
株式会社ディスコ
処理装置
28日前
株式会社ディスコ
加工装置
22日前
株式会社ディスコ
加工装置
22日前
株式会社ディスコ
加工装置
22日前
株式会社ディスコ
処理システム
23日前
株式会社ディスコ
検査ユニット
7日前
株式会社ディスコ
レーザー加工方法
28日前
株式会社ディスコ
チップの製造方法
28日前
株式会社ディスコ
板状物の処理方法
22日前
株式会社ディスコ
漏水検知システム
24日前
株式会社ディスコ
フィルターユニット
1か月前
株式会社ディスコ
保護テープ貼着方法
1か月前
株式会社ディスコ
被加工物の加工方法
今日
株式会社ディスコ
被加工物の加工方法
2日前
株式会社ディスコ
被加工物の加工方法
9日前
株式会社ディスコ
ウェーハの製造方法
22日前
株式会社ディスコ
被加工物の加工方法
6日前
株式会社ディスコ
ウエーハの加工方法
8日前
株式会社ディスコ
LEDチップ配設方法
28日前
株式会社ディスコ
研削ホイール及び研削方法
28日前
株式会社ディスコ
分離起点形成方法及び分離方法
29日前
株式会社ディスコ
ワーク搬送装置および加工装置
2日前
株式会社ディスコ
切削ブレードの刃先位置検出方法
23日前
株式会社ディスコ
加工装置及び被加工物の加工方法
1か月前
株式会社ディスコ
フィルタユニット及び廃液処理装置
24日前
株式会社ディスコ
伸縮カバー及びこれを備えた加工装置
3日前
株式会社ディスコ
テープの貼着方法及び被加工物の切削方法
2日前
株式会社ディスコ
測定方法、測定装置、及び被加工物の加工方法
1か月前
株式会社ディスコ
研削装置、被加工物の研削方法及びプログラム
1か月前
株式会社ディスコ
切削ブレードの診断方法、切削方法及び加工装置
28日前
株式会社ディスコ
貼り合わせウェーハのエッジトリミング方法及びエッジトリミング装置
1か月前
株式会社潤工社
同軸ケーブル
21日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ