TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025107174
公報種別
公開特許公報(A)
公開日
2025-07-17
出願番号
2025058341,2025500946
出願日
2025-03-31,2023-08-22
発明の名称
基板測定を使用した基板配置の最適化
出願人
アプライド マテリアルズ インコーポレイテッド
,
APPLIED MATERIALS,INCORPORATED
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
H01L
21/02 20060101AFI20250710BHJP(基本的電気素子)
要約
【課題】コンピュータ可読媒体が、実行時に、処理デバイスに動作を実行させる命令を含む。
【解決手段】動作は、プロセスチャンバ内で第1の基板を、基板支持体によって第1の配置箇所で支持されている間に処理することを含む。第1の基板は、処理後に第1の表面プロファイルを含む。動作は、基板測定システムを使用して、第1の表面プロファイルの第1の表面プロファイルマップを生成することをさらに含む。動作は、第1の基板上の複数の箇所に対応する複数のエッチング速度を判定することをさらに含む。動作は、モデルを使用して複数のエッチング速度に関連付けられたデータを処理することをさらに含み、モデルは、1つまたは複数の推定配置箇所に関連付けられた1つまたは複数の推定表面プロファイルを出力するためのものである。動作は、1つまたは複数の推定配置箇所に基づいて、基板支持体上の基板に対する推奨される配置を判定することをさらに含む。
【選択図】図10A
特許請求の範囲
【請求項1】
方策に従って基板処理システムのプロセスチャンバ内で第1の基板を、前記第1の基板が前記プロセスチャンバの基板支持体によって支持されている間に処理することであって、前記第1の基板が、前記処理後に第1の表面プロファイルを含む、処理することと、
前記基板処理システムの基板測定システムを使用して、前記第1の基板の前記第1の表面プロファイルの第1のプロファイルマップを生成することと、
モデルを使用して、前記第1のプロファイルマップからのデータを処理することであって、前記モデルが、前記基板支持体の1つまたは複数の構成要素に対する前記第1の基板の配置のための第1の推定される基板配置値を出力する、処理することと、
前記第1の推定される基板配置値に基づいて、前記基板支持体上の基板に対する推奨される配置を判定することと
を含む方法。
続きを表示(約 1,300 文字)
【請求項2】
前記推奨される配置に従って、前記プロセスチャンバ内に第2の基板を配置させることをさらに含み、前記基板支持体の前記1つまたは複数の構成要素が、プロセスキットリングを含み、前記第2の基板が、前記推奨される配置に従って、前記プロセスキットリングの内径内に位置決めされる、
請求項1に記載の方法。
【請求項3】
前記方策に従って前記プロセスチャンバ内で前記第2の基板を処理することであって、前記第2の基板が、前記処理後に第2の表面プロファイルを含む、処理することと、
前記基板処理システムの前記基板測定システムを使用して、前記第2の表面プロファイルの第2のプロファイルマップを生成することと、
前記モデルを使用して、前記第2のプロファイルマップからのデータを処理することであって、前記モデルが、第2の推定される基板配置値を出力する、処理することと、
前記第1の推定される基板配置値と前記第2の推定される基板配置値を比較することと、
前記比較に基づいて、前記推奨される配置を更新することと
をさらに含む、請求項2に記載の方法。
【請求項4】
前記基板支持体の中心を判定することと、
前記第1の基板の前記処理の前に、前記第1の基板を前記基板支持体の前記中心と位置合わせすることと
をさらに含む、請求項1に記載の方法。
【請求項5】
前記基板に対する前記推奨される配置のために、前記基板の中心が前記基板支持体の前記中心からずれている、請求項4に記載の方法。
【請求項6】
前記推奨される配置に基づいて、基板受け渡しオフセットを判定することをさらに含み、前記基板受け渡しオフセットが、第1のロボット受け渡し配向から第2のロボット受け渡し配向へのロボットアームに対するオフセットである、請求項1に記載の方法。
【請求項7】
前記第1の表面プロファイルが、第1の厚さプロファイルを含む、請求項1に記載の方法。
【請求項8】
前記第1のプロファイルマップに基づいて、前記第1の基板のエッジ付近でエッチング速度プロファイルに対する前記第1の基板の第1のエッチング速度プロファイルを判定することをさらに含み、前記モデルが、前記第1のエッチング速度プロファイルに基づいて、前記第1の推定される基板配置値を出力する、
請求項1に記載の方法。
【請求項9】
前記モデルが、訓練された機械学習モデル、物理学ベースのモデル、または統計モデルのうちの少なくとも1つを含む、請求項1に記載の方法。
【請求項10】
前記モデルが、訓練された機械学習モデルを含み、前記方法が、
前記訓練された機械学習モデルを作成するように、機械学習モデルを訓練することをさらに含み、前記機械学習モデルが、前記方策に従って処理された複数の処理された基板からのデータを使用して訓練される、請求項1に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示の実施形態は、一般に、処理チャンバ内の基板の配置を最適化することに関し、詳細には、チャンバを使用して処理された基板のマップおよび/または数値プロファイリングを生成し、基板のマップおよび/または数値プロファイリングに基づいて処理チャンバ内の基板の配置を最適化することに関する。
続きを表示(約 4,200 文字)
【背景技術】
【0002】
基板処理は、回路設計に従って半導体内に電気回路を製作する一連のプロセスを含むことができる。これらのプロセスは、一連のプロセスチャンバ内で実施することができる。現代の半導体製造設備のうまくいく動作は、ウエハ内に電気回路を形成して製品を形成する過程で、1つのチャンバから別のチャンバへウエハの安定した流れを動かすことを容易にすることを目的とすることができる。多くの基板プロセスを実行するプロセスでは、処理チャンバの条件が変更されることがあり、その結果、処理された基板は、ターゲット条件および結果を満たすことができなくなる場合がある。
【発明の概要】
【発明が解決しようとする課題】
【0003】
基板は、処理のためにプロセスチャンバ内に配置される。チャンバ部品に対する基板の配置の結果、プロセスチャンバを使用して製作される製品の品質のばらつき、および/またはプロセスチャンバを使用して処理された基板の廃棄につながる可能性がある。
【課題を解決するための手段】
【0004】
以下は、本開示のいくつかの態様に関する基本的な理解を提供するための本開示の簡略化された概要である。この概要は、本開示の広範な概説ではない。この概要は、本開示の主要なまたは重要な要素を識別することも、本開示の特定の実施形態の範囲または特許請求の範囲を示すことも意図するものではない。その唯一の目的は、本開示のいくつかの概念を、後に提示する、より詳細な説明への導入として簡略化された形態で提示することである。
【0005】
例示的な実施形態では、コンピュータ可読媒体は、処理デバイスによって実行されたとき、処理デバイスに動作を実行させる命令を含む。これらの動作は、基板処理システムのプロセスチャンバ内で第1の基板を、第1の基板が基板支持体によって基板支持体上の第1の配置箇所で支持されている間に処理することを含む。第1の基板は、処理後に第1の表面プロファイルを含む。これらの動作は、基板測定システムを使用して、第1の表面プロファイルの第1の表面プロファイルマップを生成することをさらに含む。これらの動作は、第1の表面プロファイルマップに基づいて、第1の基板上の第1の複数の箇所に対応する第1の複数のエッチング速度を判定することをさらに含む。これらの動作は、モデルを使用して、第1の複数のエッチング速度に関連付けられたデータを処理することをさらに含む。このモデルは、第1の複数のエッチング速度に基づいて、基板支持体上の1つまたは複数の推定配置箇所に関連付けられた1つまたは複数の推定表面プロファイルを出力するためのものである。これらの動作は、1つまたは複数の推定配置箇所に基づいて、基板支持体上の基板に対する推奨される配置を判定することをさらに含む。
【0006】
例示的な実施形態では、システムは、基板支持体を含むプロセスチャンバを含む。システムは、基板測定ツールと、メモリと、メモリに動作可能に結合された処理デバイスとをさらに含む。処理デバイスは、プロセスチャンバ内で第1の基板を、第1の基板が基板支持体によって基板支持体上の第1の配置箇所で支持されている間に処理させるためのものである。第1の基板は、処理後に第1の表面プロファイルを含む。処理デバイスはさらに、基板測定ツールを使用して、第1の表面プロファイルの第1の表面プロファイルマップを生成するためのものである。処理デバイスはさらに、第1の表面プロファイルマップに基づいて、第1の基板上の第1の複数の箇所に対応する第1の複数のエッチング速度を判定するためのものである。処理デバイスはさらに、モデルを使用して、第1の複数のエッチング速度に関連付けられたデータを処理するためのものである。モデルは、第1の複数のエッチング速度に基づいて、基板支持体上の1つまたは複数の推定配置箇所に関連付けられた1つまたは複数の推定表面プロファイルを出力するためのものである。処理デバイスはさらに、1つまたは複数の推定配置箇所に基づいて、基板支持体上の基板に対する推奨される配置を判定するためのものである。
【0007】
例示的な実施形態では、方法は、プロセスチャンバ内で第1の基板を、第1の基板が基板支持体によって基板支持体上の第1の配置箇所で支持されている間に処理させることを含む。第1の基板は、処理後に第1の表面プロファイルを含む。この方法は、基板測定システムを使用して、第1の表面プロファイルの第1の表面プロファイルマップを生成することをさらに含む。この方法は、第1の表面プロファイルマップに基づいて、第1の基板上の第1の複数の箇所に対応する第1の複数のエッチング速度を判定することをさらに含む。この方法は、モデルを使用して、第1の複数のエッチング速度に関連付けられたデータを処理することをさらに含む。このモデルは、第1の複数のエッチング速度に基づいて、基板支持体上の1つまたは複数の推定配置箇所に関連付けられた1つまたは複数の推定表面プロファイルを出力するためのものである。この方法は、1つまたは複数の推定配置箇所に基づいて、基板支持体上の基板に対する推奨される配置を判定することをさらに含む。
【0008】
本開示は、限定ではなく例として示されており、添付の図面の図では、同様の参照が類似の要素を示す。本開示における「実施形態(an embodiment)」または「一実施形態(one embodiment)」への様々な参照は、必ずしも同じ実施形態を指すわけではなく、そのような参照は少なくとも1つを意味することに留意されたい。
【図面の簡単な説明】
【0009】
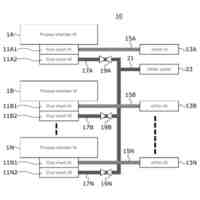
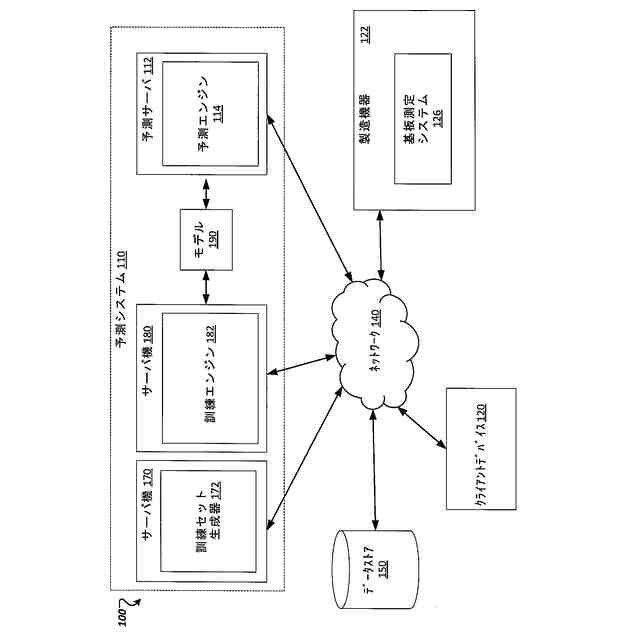
本開示の態様による、例示的なコンピュータシステムアーキテクチャを示す図である。
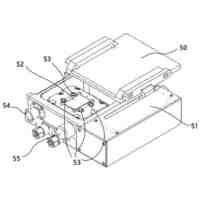
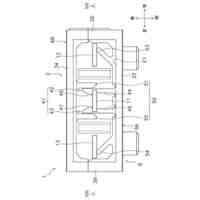
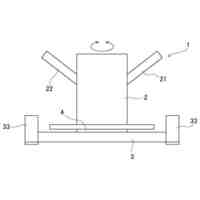
本開示の態様による、例示的な製造システムの概略上面図である。
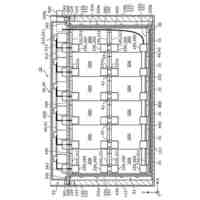
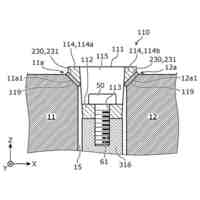
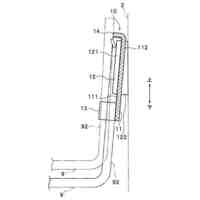
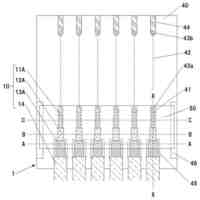
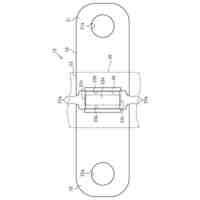
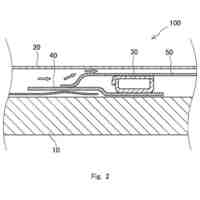
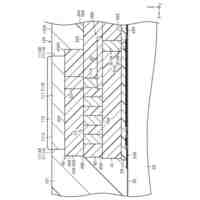
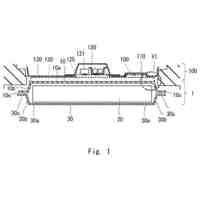
本開示の態様による、図2Aの例示的な製造システム内に含まれる基板測定システムの概略断面側面図である。
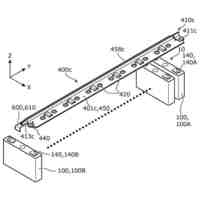
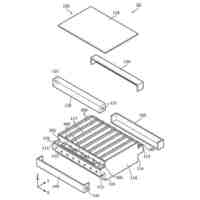
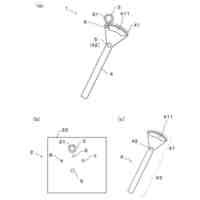
本開示の態様による、基板測定サブシステムの概略断面側面図である。
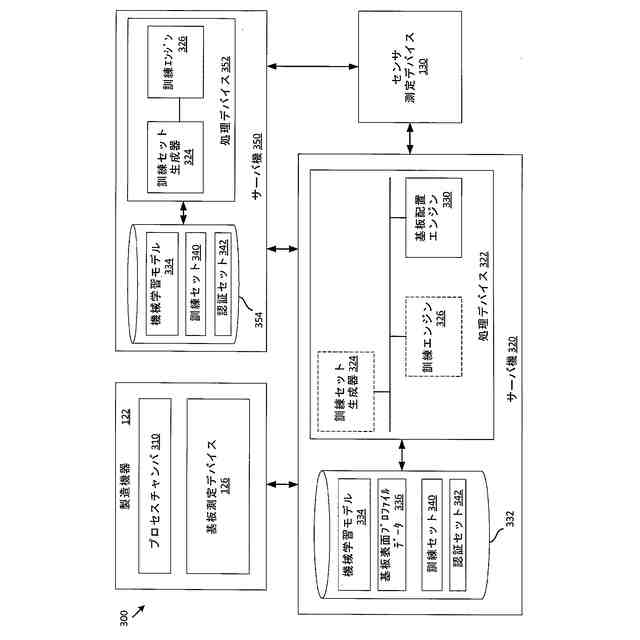
本開示の態様による、処理チャンバ用の基板配置予測のための例示的なシステムアーキテクチャを示す図である。
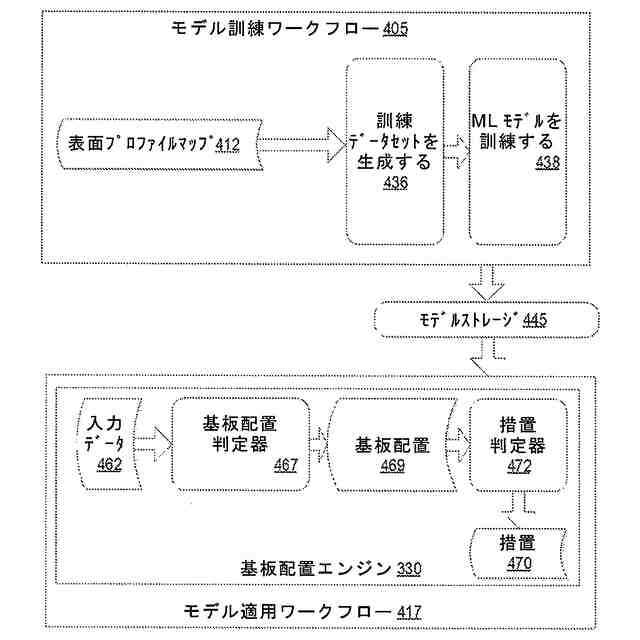
一実施形態による、基板配置判定のためのモデル訓練ワークフローおよびモデル適用ワークフローを示す図である。
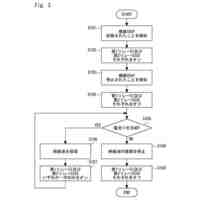
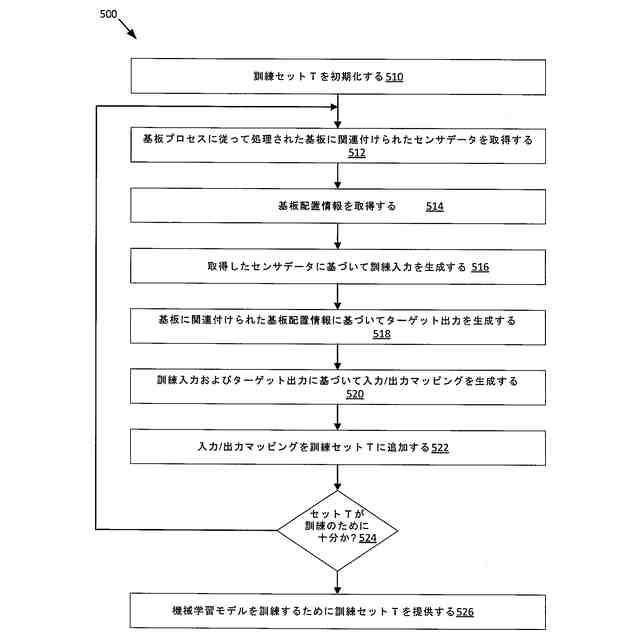
本開示の態様による、機械学習モデルを訓練するための訓練データセットを生成する方法のフローチャートである。
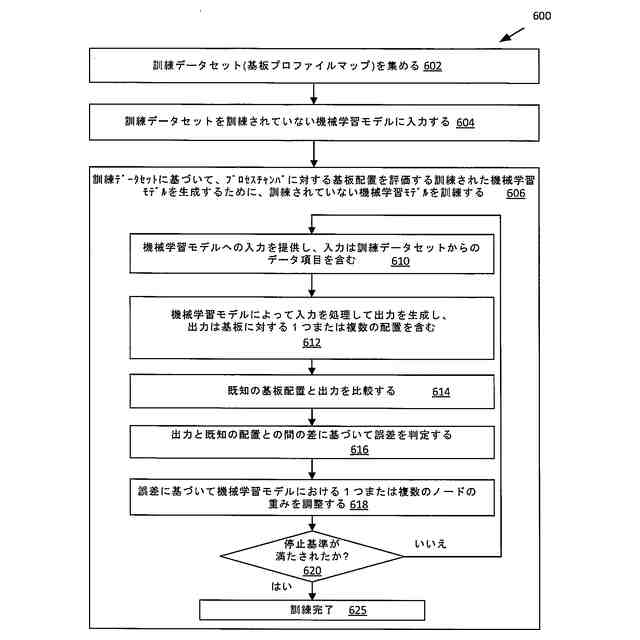
一実施形態による、基板配置を判定するように機械学習モデルを訓練する方法の流れ図である。
本開示の態様による、推奨される基板配置を判定する方法の流れ図である。
本開示の態様による、第1の推定される基板配置と第2の推定される基板配置を比較する方法の流れ図である。
本開示の態様による、処理された基板のプロファイルマップ(たとえば、ヒートマップ)の図である。
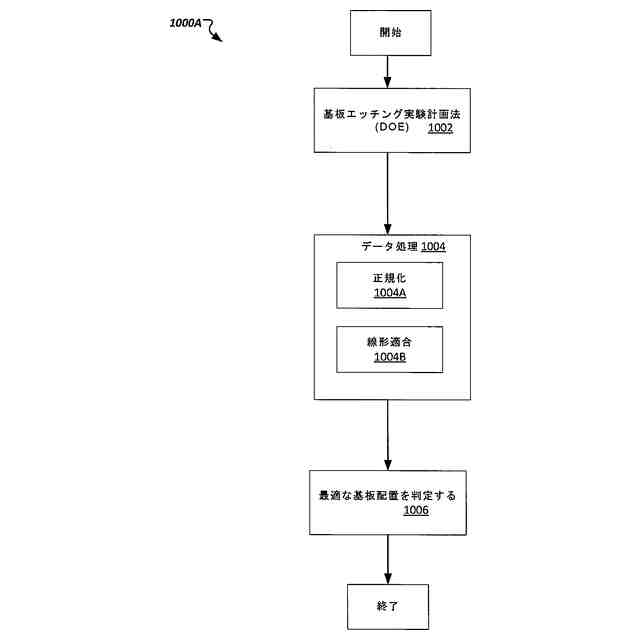
本開示の態様による、最適な基板配置を判定する方法の流れ図である。
本開示の態様による、最適な基板配置を判定する方法の流れ図である。
本開示の態様による、実験の基板配置設計の例示的なプロット図である。
本開示の態様による、θに対する基板エッチング速度の例示的な放射状プロットを示す図である。
本開示の態様による、θに対する基板エッチング速度の例示的なプロットを示す図である。
本開示の態様による、θに対する正規化された基板エッチング速度の例示的なプロットを示す図である。
本開示の態様による、実験の基板配置設計の正規化された基板エッチング速度の例示的なプロットを示す図である。
本開示の態様による、実験の基板設計の例示的なプロット図である。
本開示の態様による、基板エッチング速度に対する線形適合の例示的なプロットを示す図である。
本開示の態様による、最適な基板配置を判定する方法の流れ図である。
本明細書に論じる技法の任意の1つまたは複数を機械に実行させるための1組の命令を実行することができる、コンピューティングデバイスの例示的な形態の機械の図表示である。
【発明を実施するための形態】
【0010】
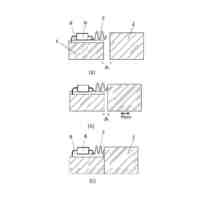
本開示の実施形態は、基板測定を使用してプロセスチャンバ内で基板配置を最適化するためのシステムおよび方法を対象とする。製造プロセスのプロセス結果は、プロセス方策、チャンバパラメータ設定、チャンバ部品条件、およびプロセスチャンバ内の基板配置を含む、多くの要因に依存する。たとえば、プロセス結果は、プロセスキットリングに対する基板の配置に基づいて、基板の表面にわたって変動することがある。基板のエッジとプロセスキットリングとの間の間隙は、基板のエッジ付近の基板処理の影響に関係することが多い。加えて、プロセス結果は、シャワーヘッドの条件、基板を支持する基板支持体の条件、チャンバライナの条件、ポンプおよび/またはバルブの条件などに基づいて、基板の表面にわたって変動することがある。基板の最適化された配置は、本明細書に記載するプロセスチャンバ部品の条件による影響を受ける可能性がある。たとえば、静電チャック、クランプ、真空チャック、ヒータ、支持体のエッジにリップを有するポケットを含む支持体、および/または1つもしくは複数の埋め込まれた特徴(たとえば、ヒータ、冷却板、電気要素など)を含む基板支持体などの基板支持体の任意の経時的な変化は、処理された基板の表面にわたる温度変化、基板のエッジにおける無線周波(RF)場などによって、基板結果にゆっくりと影響を与える。基板結果に対するこれらの影響は、最善のプロセス結果のための最適化された基板配置にゆっくりと影響を与える。したがって、基板支持体上の基板の最適な配置は、時間と共に変化する傾向を有することがある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ExH
電流開閉装置
14日前
レナタ・アーゲー
電池
29日前
株式会社潤工社
同軸ケーブル
12日前
株式会社クオルテック
空気電池
26日前
個人
鉄心用材料とその製造方法
19日前
エイブリック株式会社
半導体装置
14日前
株式会社メルビル
ステージ
21日前
株式会社GSユアサ
蓄電装置
14日前
株式会社GSユアサ
蓄電装置
19日前
株式会社GSユアサ
蓄電装置
12日前
株式会社GSユアサ
蓄電装置
19日前
株式会社GSユアサ
蓄電装置
19日前
オムロン株式会社
電磁継電器
15日前
豊田鉄工株式会社
コイル部品
28日前
株式会社GSユアサ
蓄電装置
19日前
株式会社GSユアサ
蓄電装置
19日前
株式会社ダイヘン
変圧器
5日前
オムロン株式会社
スイッチ装置
12日前
トヨタ自動車株式会社
電源装置
14日前
日星電気株式会社
ケーブルアセンブリ
13日前
住友電装株式会社
端子台
13日前
中国電力株式会社
移動用変圧器
28日前
トヨタ自動車株式会社
電池パック
14日前
ローム株式会社
チップ部品
14日前
エドワーズ株式会社
冷却システム
19日前
トヨタ自動車株式会社
電池パック
14日前
中国電力株式会社
断路器操作構造
15日前
東洋電装株式会社
操作装置
15日前
住友電装株式会社
コネクタ
19日前
住友電装株式会社
コネクタ
19日前
株式会社アイシン
回転電機駆動装置
20日前
日新電機株式会社
ガス遮断器
12日前
三菱電機株式会社
半導体装置
29日前
三菱電機株式会社
半導体装置
27日前
株式会社村田製作所
二次電池
19日前
株式会社ミトリカ
フラッシュランプ
13日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ