TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025105013
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2023223261
出願日
2023-12-28
発明の名称
焦点検出装置及び方法、撮像装置、プログラム及び記憶媒体
出願人
キヤノン株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
G02B
7/28 20210101AFI20250703BHJP(光学)
要約
【課題】 被写体の一時的な状態変化があった場合でも、優先度の高い部位にピントを合わせ続けること。
【解決手段】 撮像装置から繰り返し出力される画像信号の画像から被写体と、被写体に含まれる特徴領域と、を検出し、検出された被写体および特徴領域に、予め決められた大きさの複数の焦点検出領域を設定する。また、画像信号に基づいて、設定された前記複数の焦点検出領域それぞれにおける焦点状態を検出し、複数の焦点検出領域のうち、予め決められた条件を満たす第1の領域と、特徴領域を含む第2の領域と、を選択する。焦点状態に基づく、第1の領域の焦点状態の第1の履歴と、第1の領域の焦点状態と第2の領域の焦点状態との差の第2の履歴とから、任意の時間における第2の領域の焦点状態を予測し、第2の領域の焦点状態に基づいて、第2の領域に合焦させるための、焦点調節手段の駆動量を求める。
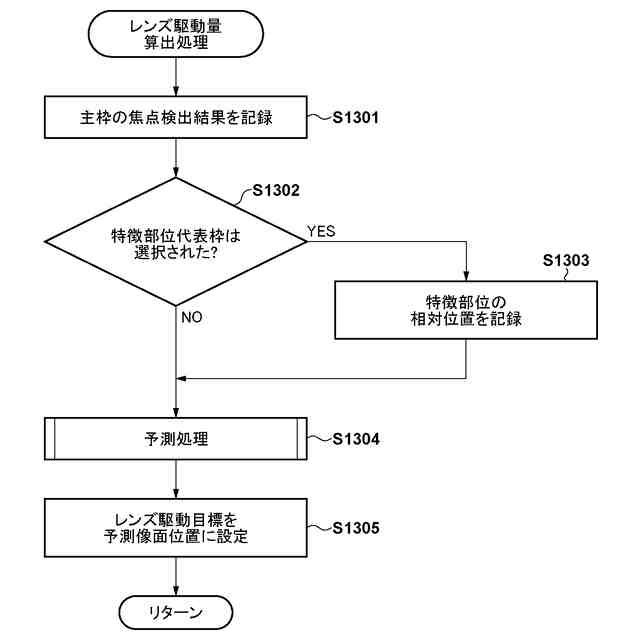
【選択図】 図13
特許請求の範囲
【請求項1】
撮像装置から繰り返し出力される画像信号の画像から被写体と、前記被写体に含まれる特徴領域と、を検出する被写体検出手段と、
前記被写体検出手段により検出された前記被写体および前記特徴領域に、予め決められた大きさの複数の焦点検出領域を設定する設定手段と、
前記画像信号に基づいて、前記設定手段により設定された前記複数の焦点検出領域それぞれにおける焦点状態を検出する検出手段と、
前記複数の焦点検出領域のうち、予め決められた条件を満たす第1の領域と、前記特徴領域を含む第2の領域と、を選択する選択手段と、
前記検出手段により検出された焦点状態に基づく、前記第1の領域の焦点状態の第1の履歴と、前記第1の領域の焦点状態と前記第2の領域の焦点状態との差の第2の履歴とから、任意の時間における前記第2の領域の焦点状態を予測する予測手段と、
前記予測手段により予測された前記第2の領域の焦点状態に基づいて、前記第2の領域に合焦させるための、焦点調節手段の駆動量を求める取得手段と
を有することを特徴とする焦点検出装置。
続きを表示(約 1,100 文字)
【請求項2】
前記予測手段は、前記第1の履歴に基づいて、前記任意の時間における前記第1の領域の焦点状態を予測し、前記第2の履歴に基づいて、前記任意の時間における前記差を予測することを特徴とする請求項1に記載の焦点検出装置。
【請求項3】
前記予測手段は、前記第1の履歴および前記第2の履歴に基づいて、一括最小二乗法または逐次最小二乗法により、前記任意の時間における前記第1の領域の焦点状態および前記差を予測することを特徴とする請求項2に記載の焦点検出装置。
【請求項4】
前記被写体の深度幅を推定する推定手段を更に有し、
前記予測手段は、当該深度幅と前記差との比を、一括最小二乗法または逐次最小二乗法によって予測することによって、前記任意の時間における前記差を予測することを特徴とする請求項2に記載の焦点検出装置。
【請求項5】
前記被写体の深度幅を推定する推定手段を更に有し、
前記予測手段は、前記被写体の深度幅を振幅とした単振動モデルに近似することで、前記任意の時間における前記差を予測することを特徴とする請求項2に記載の焦点検出装置。
【請求項6】
前記予測手段は、前記任意の時間における、予測した前記第1の領域の焦点状態と前記差とを加算することにより、前記任意の時間における前記第2の領域の焦点状態を予測することを特徴とする請求項2に記載の焦点検出装置。
【請求項7】
前記推定手段は、前記複数の焦点検出領域の焦点状態に基づいて、前記複数の焦点検出領域を予め決められた深度幅の複数の深度に分類し、前記複数の焦点検出領域を含む深度をまとめた深度幅を、前記被写体の深度幅として推定することを特徴とする請求項4に記載の焦点検出装置。
【請求項8】
前記推定手段は、被写体の種別、撮影距離、画像情報に基づいて、被写体の深度幅を推定するための学習を行い、前記被写体の深度幅を推定することを特徴とする請求項4に記載の焦点検出装置。
【請求項9】
前記推定手段は、前記複数の焦点検出領域の焦点状態に基づいて、前記複数の焦点検出領域を予め決められた深度幅の複数の深度に分類し、前記複数の焦点検出領域を含む深度をまとめた深度幅を、前記被写体の深度幅として推定することを特徴とする請求項5に記載の焦点検出装置。
【請求項10】
前記推定手段は、被写体の種別、撮影距離、画像情報に基づいて、被写体の深度幅を推定するための学習を行い、前記被写体の深度幅を推定することを特徴とする請求項5に記載の焦点検出装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、焦点検出装置及び方法、撮像装置、プログラム及び記憶媒体に関し、特に被写体検出情報を活用した焦点調節技術に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
近年、撮影レンズの焦点位置を自動調節する焦点調節機能(以下、「AF」と呼ぶ。)を備えたカメラが普及している。その焦点調節を行う手段として、撮像素子を用いた撮像面位相差AF方式やコントラストAF方式等、様々なAF方式が実用化されている。
【0003】
さらに、様々なAF方式において、主被写体の領域を特定して合焦させる技術がある。特許文献1では、検出された被写体のうち、焦点検出が困難な領域を回避しつつ、優先すべき部位にピントを合わせる制御手法が開示されている。
【0004】
またその多くは、静止する被写体のみならず、移動する被写体に焦点が合うようにフォーカスレンズを駆動させるサーボ撮影モードを備えている。サーボ撮影モードは、過去の移動履歴から被写体がどのように動いているのかを予測する機能を持つ。特許文献2では、検出された被写体の部位ごとに焦点検出履歴を保持し、条件に応じて予測に使用する履歴を切り替える制御手法が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2021-173803号公報
特許第7066388号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1及び特許文献2においては、被写体の姿勢や光の当たり方といった一時的な状態変化があった場合、優先度の高い検出部位の被写体検出ができない、焦点検出ができない、といった問題が発生し、優先度の高い検出部位にピントを合わせられなくなるという問題がある。
【0007】
本発明は上記問題点を鑑みてなされたものであり、被写体の一時的な状態変化があった場合でも、優先度の高い部位にピントを合わせ続けることを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明の焦点検出装置は、撮像装置から繰り返し出力される画像信号の画像から被写体と、前記被写体に含まれる特徴領域と、を検出する被写体検出手段と、前記被写体検出手段により検出された前記被写体および前記特徴領域に、予め決められた大きさの複数の焦点検出領域を設定する設定手段と、前記画像信号に基づいて、前記設定手段により設定された前記複数の焦点検出領域それぞれにおける焦点状態を検出する検出手段と、前記複数の焦点検出領域のうち、予め決められた条件を満たす第1の領域と、前記特徴領域を含む第2の領域と、を選択する選択手段と、前記検出手段により検出された焦点状態に基づく、前記第1の領域の焦点状態の第1の履歴と、前記第1の領域の焦点状態と前記第2の領域の焦点状態との差の第2の履歴とから、任意の時間における前記第2の領域の焦点状態を予測する予測手段と、前記予測手段により予測された前記第2の領域の焦点状態に基づいて、前記第2の領域に合焦させるための、焦点調節手段の駆動量を求める取得手段とを有する。
【発明の効果】
【0009】
本発明によれば、被写体の一時的な状態変化があった場合でも、優先度の高い部位にピントを合わせ続けることができる。
【図面の簡単な説明】
【0010】
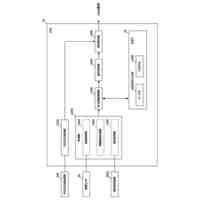
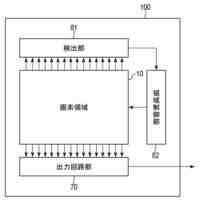
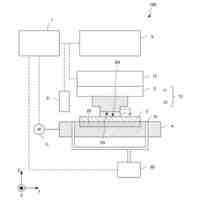
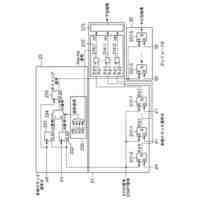
本発明の実施形態における撮像装置の構成を示すブロック図。
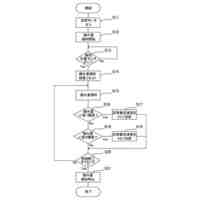
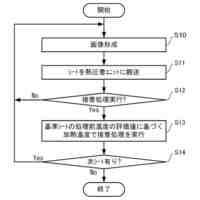
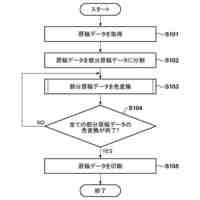
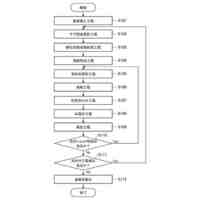
実施形態における撮像装置による撮影動作のフローチャート。
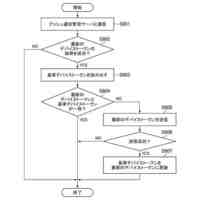
実施形態におけるAF枠設定処理を説明するフローチャート。
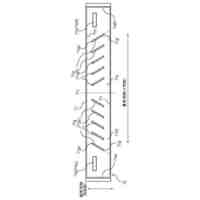
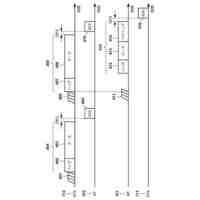
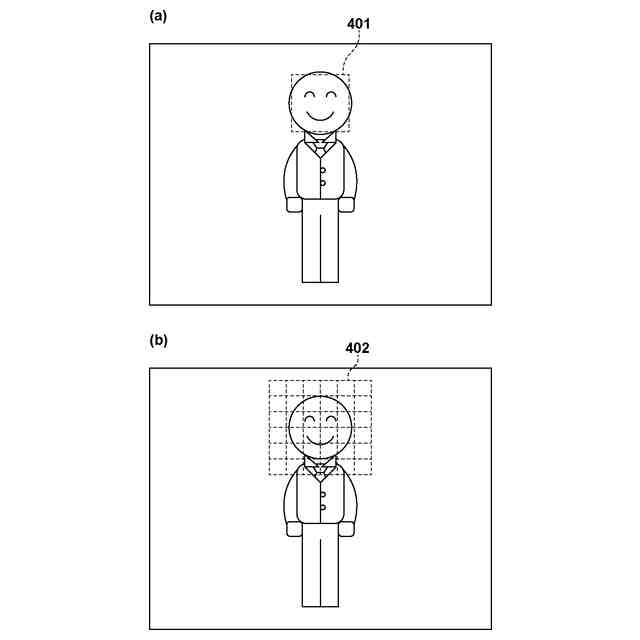
実施形態における検出された主要領域が1つである場合のAF枠の概念を説明する図。
実施形態における検出された主要領域が複数ある場合のAF枠の概念を説明する図。
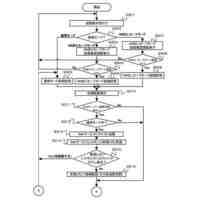
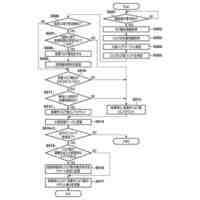
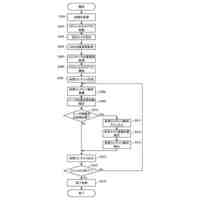
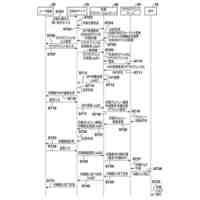
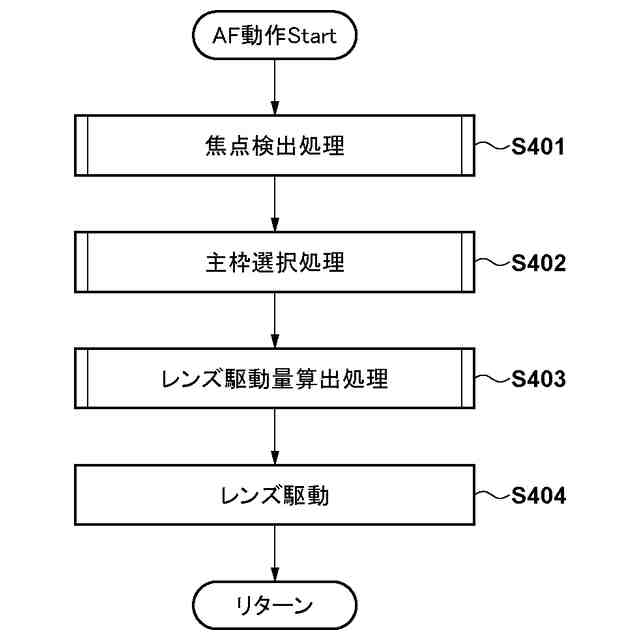
実施形態におけるAF動作の全体の流れを示すフローチャート。
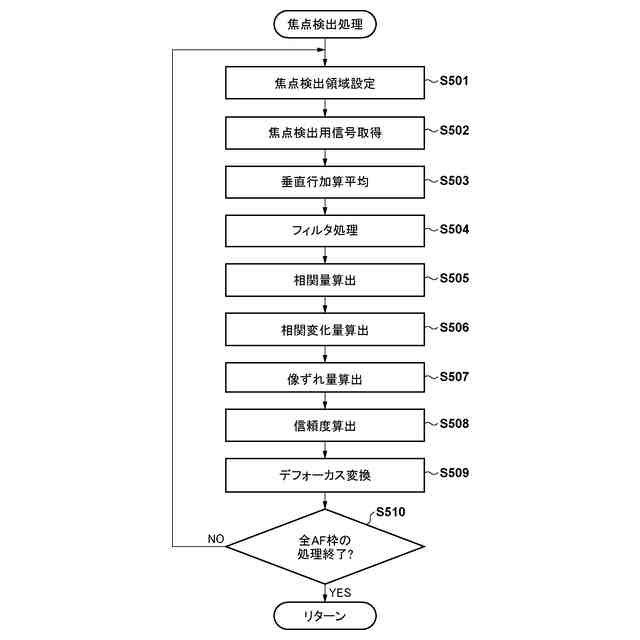
実施形態における焦点検出処理を示すフローチャート。
実施形態における主枠選択処理を示すフローチャート。
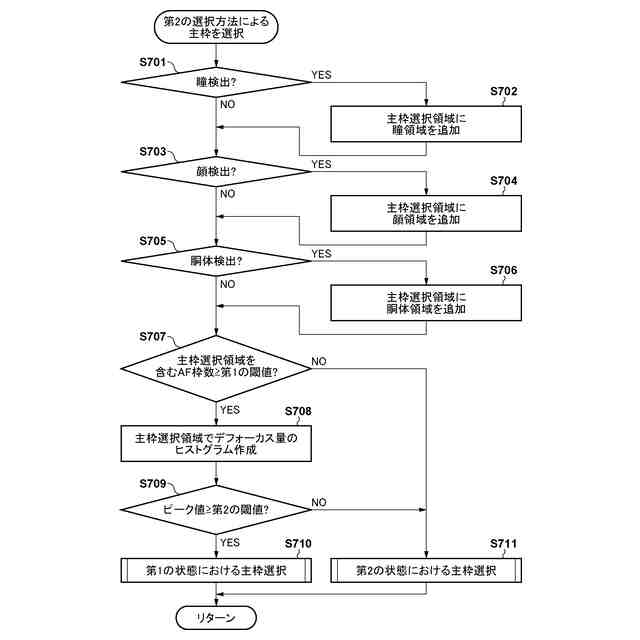
実施形態における第2の選択方法による主枠選択を説明するフローチャート。
実施形態における第1の状態における主枠選択を説明するフローチャート。
実施形態における第2の状態における主枠選択を説明するフローチャート。
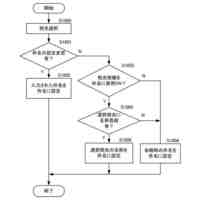
実施形態における特徴部位代表枠の選択処理を説明するフローチャート。
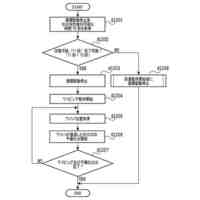
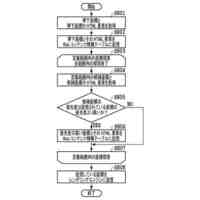
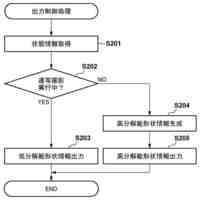
実施形態におけるレンズ駆動量算出処理のフローチャート。
実施形態における予測処理のフローチャート。
実施形態における被写体全体の予測曲線の一例を示す図。
実施形態における特徴部位の相対位置の予測曲線の一例を示す図。
実施形態における特徴部位の予測処理の概念を示す図。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
電子機器
5日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
電子写真装置
5日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
力検出装置および搬送装置
5日前
キヤノン株式会社
測定装置及び物品の製造方法
5日前
キヤノン株式会社
レンズ鏡筒、および撮像装置
5日前
キヤノン株式会社
ステレオ光学系および撮像装置
5日前
キヤノン株式会社
ステレオ光学系および撮像装置
5日前
キヤノン株式会社
光電変換装置及び光検出システム
5日前
キヤノン株式会社
シート搬送装置及び画像形成装置
6日前
キヤノン株式会社
通信装置、通信方法、及びプログラム
今日
キヤノン株式会社
制御装置、制御方法、及びプログラム
今日
キヤノン株式会社
画像処理装置、方法、およびプログラム
12日前
キヤノン株式会社
管理システム及び管理方法とプログラム
6日前
キヤノン株式会社
通信装置、通信方法、及び、プログラム
今日
キヤノン株式会社
露光装置、制御方法及び物品の製造方法
12日前
キヤノン株式会社
液体吐出装置および液体吐出装置の制御方法
6日前
キヤノン株式会社
情報処理装置、制御方法、およびプログラム
5日前
キヤノン株式会社
膜形成装置、膜形成方法および物品製造方法
5日前
キヤノン株式会社
膜成形方法、膜成形装置、及び物品の製造方法
今日
キヤノン株式会社
画像処理装置、その制御方法およびプログラム
5日前
キヤノン株式会社
情報処理装置、情報処理方法、及びプログラム
今日
キヤノン株式会社
印刷システム、その制御方法、及びプログラム
5日前
キヤノン株式会社
膜形成方法、物品製造方法、および硬化性組成物
5日前
キヤノン株式会社
時間デジタル変換装置、測距装置、移動体、機器
6日前
キヤノン株式会社
記録装置、記録装置の制御方法およびプログラム
6日前
キヤノン株式会社
情報処理装置、情報処理方法、およびプログラム
今日
キヤノン株式会社
プログラム、情報処理装置の制御方法、情報処理装置
5日前
キヤノン株式会社
液体吐出装置、液体吐出方法、および、物品の製造方法
5日前
キヤノン株式会社
情報処理装置、制御方法、プログラム及び撮像システム
6日前
キヤノン株式会社
コンピュータプログラム、印刷制御方法、及びシステム
12日前
キヤノン株式会社
画像処理装置、画像処理装置の制御方法、及びプログラム
今日
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ