TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025101205
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023217873
出願日
2023-12-25
発明の名称
回転電機の制御装置
出願人
三菱電機モビリティ株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
H02P
9/04 20060101AFI20250630BHJP(電力の発電,変換,配電)
要約
【課題】本開示は、2組の複数相の電機子巻線が設けられている場合に、オルタネータ発電制御の実行中に電機子巻線に印加されている印加電圧を推定することができる回転電機の制御装置を提供する。
【解決手段】第1組のm相の電機子巻線及び第2組のm相の電機子巻線を有する回転電機を制御する回転電機の制御装置であって、オルタネータ発電制御の実行時の各組の前記電機子巻線を流れる電流検出値に基づいて、各組の前記電機子巻線に印加されている印加電圧推定値を算出し、各組において、第1組の電機子巻線と第2組の電機子巻線との位相差は、各組の相間の最小位相差の1/2である回転電機の制御装置。
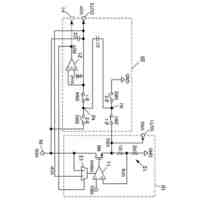
【選択図】図3
特許請求の範囲
【請求項1】
第1組のm相(mは、3以上の整数)の電機子巻線及び第2組のm相の電機子巻線を有する回転電機を、それぞれ、第1組のインバータ及び第2組のインバータを介して制御する回転電機の制御装置であって、
前記回転電機の回転により各組の前記電機子巻線に生じる誘起電圧により各組の前記インバータを整流器として機能させて前記回転電機を発電機として動作させるオルタネータ発電制御を実行し、前記オルタネータ発電制御の実行時の各組の前記電機子巻線を流れる電流検出値に基づいて、各組の前記電機子巻線に印加されている印加電圧推定値を算出し、
各組において、各相の電機子巻線の位相及び逆位相を合わせた複数の位相の間における0より大きい位相差の最小値を、各組の相間の最小位相差とし、前記第1組のm相の電機子巻線と前記第2組のm相の電機子巻線との電気角での位相差は、前記各組の相間の最小位相差の1/2である回転電機の制御装置。
続きを表示(約 2,700 文字)
【請求項2】
mは奇数であり、
前記各組の相間の最小位相差は、π/mであり、前記第1組のm相の電機子巻線と前記第2組のm相の電機子巻線との位相差は、π/m/2である請求項1に記載の回転電機の制御装置。
【請求項3】
前記第1組のm相のうちのA1相の電機子巻線を流れる電流検出値ia1と、前記A1相との位相差がπ/m/2である前記第2組のm相のうちのB2相の電機子巻線を流れる電流検出値ib2と、前記A1相との位相差が(π-π/m/2)である前記第2組のm相のうちのC2相の電機子巻線を流れる電流検出値ic2とに基づいて、前記オルタネータ発電制御の実行時の前記印加電圧推定値を算出する請求項2に記載の回転電機の制御装置。
【請求項4】
前記A1相の電流検出値ia1、前記B2相の電流検出値ib2、及び前記C2相の電流検出値ic2に基づいて、前記オルタネータ発電制御の実行時の前記電流検出値に含まれる電気角1次の成分の振幅及び電気角(2m-1)次の成分の振幅を算出し、
前記電気角1次の成分の振幅及び前記電気角(2m-1)次の成分の振幅に基づいて、前記オルタネータ発電制御の実行時の前記印加電圧推定値を算出する請求項3に記載の回転電機の制御装置。
【請求項5】
TIFF
2025101205000071.tif
21
170
の算出式を用い、前記A1相の電流検出値ia1、前記B2相の電流検出値ib2、及び前記C2相の電流検出値ic2に基づいて、前記A1相の電流検出値ia1の電気角1次の成分ia1_1を算出し、前記電気角1次の成分ia1_1の2乗値をローパスフィルタに通した値に基づいて前記電気角1次の振幅を算出し、
TIFF
2025101205000072.tif
21
170
の算出式を用い、前記A1相の電流検出値ia1、前記B2相の電流検出値ib2、及び前記C2相の電流検出値ic2に基づいて、前記A1相の電流検出値ia1の電気角(2m-1)次の成分ia1_2m-1を算出し、前記電気角(2m-1)次の成分ia1_2m-1の2乗値をローパスフィルタに通した値に基づいて前記電気角(2m-1)次の振幅を算出する請求項4に記載の回転電機の制御装置。
【請求項6】
前記第1組のm相のうちのA1相の電機子巻線を流れる電流検出値ia1と、
前記A1相との位相差がπ/m/2である前記第2組のm相のうちのB2相の電機子巻線を流れる電流検出値ib2と、
前記A1相との位相差が(π-π/m/2)である前記第2組のm相のうちのC2相の電機子巻線を流れる電流検出値ic2と、
前記A1相との位相差がπ/2である前記第2組のm相のうちのA2相の電機子巻線を流れるA2相の電流検出値ia2と、
前記A2相との位相差がπ/m/2である前記第1組のm相のうちのB1相の電流検出値ib1と、
前記A2相との位相差が(π-π/m/2)である前記第1組のm相のうちのC1相の電流検出値ic1とに基づいて、
前記オルタネータ発電制御の実行時の前記印加電圧推定値を算出する請求項2に記載の回転電機の制御装置。
【請求項7】
前記A1相の電流検出値ia1、前記B2相の電流検出値ib2、前記C2相の電流検出値ic2、前記A2相の電流検出値ia2、前記B1相の電流検出値ib1、及び前記C1相の電流検出値ic1に基づいて、前記オルタネータ発電制御の実行時の電流検出値に含まれる電気角1次の成分の振幅及び電気角(2m-1)次の成分の振幅を算出し、
電気角1次の成分の振幅及び電気角(2m-1)次の成分の振幅に基づいて、前記オルタネータ発電制御の実行時の前記印加電圧推定値を算出する請求項6に記載の回転電機の制御装置。
【請求項8】
TIFF
2025101205000073.tif
29
170
の算出式を用い、前記A1相の電流検出値ia1、前記B2相の電流検出値ib2、前記C2相の電流検出値ic2、前記A2相の電流検出値ia2、前記B1相の電流検出値ib1、及び前記C1相の電流検出値ic1に基づいて、前記電気角1次の成分の振幅I1を算出し、
TIFF
2025101205000074.tif
29
170
の算出式を用い、前記A1相の電流検出値ia1、前記B2相の電流検出値ib2、前記C2相の電流検出値ic2、前記A2相の電流検出値ia2、前記B1相の電流検出値ib1、及び前記C1相の電流検出値ic1に基づいて、前記電気角(2m-1)次の成分の振幅I2m-1を算出する請求項7に記載の回転電機の制御装置。
【請求項9】
前記A1相の電流検出値ia1、前記B2相の電流検出値ib2、前記C2相の電流検出値ic2、前記A2相の電流検出値ia2、前記B1相の電流検出値ib1、及び前記C1相の電流検出値ic1に基づいて、前記オルタネータ発電制御の実行時の電流検出値に含まれる電気角1次の成分の振幅及び位相、及び電気角(2m-1)次の成分の振幅及び位相を算出し、
前記電気角1次の成分の振幅及び位相、及び前記電気角(2m-1)次の成分の振幅及び位相に基づいて、前記オルタネータ発電制御の実行時の前記印加電圧推定値を算出する請求項6に記載の回転電機の制御装置。
【請求項10】
TIFF
2025101205000075.tif
58
170
の算出式を用い、前記A1相の電流検出値ia1、前記B2相の電流検出値ib2、前記C2相の電流検出値ic2、前記A2相の電流検出値ia2、前記B1相の電流検出値ib1、及び前記C1相の電流検出値ic1に基づいて、前記電気角1次の成分の振幅I1及び位相Δθ1を算出し、
TIFF
2025101205000076.tif
58
170
の算出式を用い、前記A1相の電流検出値ia1、前記B2相の電流検出値ib2、前記C2相の電流検出値ic2、前記A2相の電流検出値ia2、前記B1相の電流検出値ib1、及び前記C1相の電流検出値ic1に基づいて、前記電気角(2m-1)次の成分の振幅I2m-1及び位相Δθ2m-1を算出する請求項9に記載の回転電機の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、回転電機の制御装置に関するものである。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
特許文献1の多重巻線電動機では、d軸電流指令値、q軸電流指令値、抵抗、インダクタンス、磁束および電気角速度に基づいて非干渉電圧を算出することによって、多重巻線において非干渉制御を実現し、電流制御応答を向上している。
【0003】
特許文献2の交流回転機の制御装置では、オルタネータ発電制御において電機子巻線の電流指令値が演算されないため、オルタネータ発電制御からインバータ制御への切り替え時には、過去の電流指令値に代えて電流検出値を用い、今回の電流指令値、電流検出値、及び交流回転機の電気的定数に基づいて基本電圧指令値を算出することで、インバータ制御開始時の電圧指令の精度を向上して、母線電流の変動を抑制している。
【先行技術文献】
【特許文献】
【0004】
特開平11-262293号公報
特許7002625号
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1のように非干渉電圧を算出する場合、抵抗、インダクタンスおよび磁束が精度よく与えられていれば、非干渉電圧は電流指令値を定常状態で出力するために必要となるものと等価になる。しかしながら、実際には、製造ばらつき、温度変化及び経年変化などによって、定常時の電圧指令値は非干渉電圧とは異なるものとなる。つまり、通電電流から非干渉電圧の算出式を用いて印加電圧を得ようとしても、実際の印加電圧からずれたものとなる。
【0006】
特許文献2で得られる基本電圧指令値は、オルタネータ発電制御時の電流検出値、電流指令値、及び交流回転機の電気的定数に基づいて算出されているが、電気的定数の誤差によって精度が低下する懸念がある。オルタネータ発電制御時には同期整流又はダイオード整流が行われるため、インバータ制御時のように電圧指令値が演算されておらず、電機子巻線への印加電圧を把握できない。そのため、例えば、電気的定数の誤差による基本電圧指令値の誤差があると、オルタネータ発電制御からインバータ制御への切り替え時に、オルタネータ発電制御の終了直前の印加電圧と基本電指令値とのずれが大きくなり、母線電流の変動が大きくなる恐れがある。
【0007】
そこで、本開示は、2組の複数相の電機子巻線が設けられている場合に、オルタネータ発電制御の実行中に電機子巻線に印加されている印加電圧を推定することができる回転電機の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本開示に係る回転電機の制御装置は、第1組のm相(mは、3以上の整数)の電機子巻線及び第2組のm相の電機子巻線を有する回転電機を、それぞれ、第1組のインバータ及び第2組のインバータを介して制御する回転電機の制御装置であって、
前記回転電機の回転により各組の前記電機子巻線に生じる誘起電圧により各組の前記インバータを整流器として機能させて前記回転電機を発電機として動作させるオルタネータ発電制御を実行し、前記オルタネータ発電制御の実行時の各組の前記電機子巻線を流れる電流検出値に基づいて、各組の前記電機子巻線に印加されている印加電圧推定値を算出し、
各組において、各相の電機子巻線の位相及び逆位相を合わせた複数の位相の間における0より大きい位相差の最小値を、各組の相間の最小位相差とし、前記第1組のm相の電機子巻線と前記第2組のm相の電機子巻線との電気角での位相差は、前記各組の相間の最小位相差の1/2であるものである。
【発明の効果】
【0009】
本開示に係る回転電機の制御装置によれば、オルタネータ発電制御の実行時の各組の電機子巻線を流れる電流検出値に基づいて、各組の電機子巻線に印加されている印加電圧推定値を算出することができる。この際、第1組のm相の電機子巻線と第2組のm相の電機子巻線との電気角での位相差は、各組の相間の最小位相差の1/2にされているので、特定の相の電流検出値と、位相差がπ/2になる相の電流検出値を得ることできる。そのため、各組及び各相の電流検出値の位相差を利用して、電流検出値に含まれる電気角1次の基本波と高調波を分離して検出することができ、印加電圧推定値を精度よく算出することができる。
【図面の簡単な説明】
【0010】
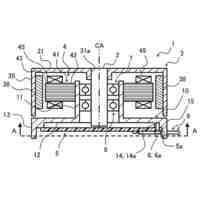
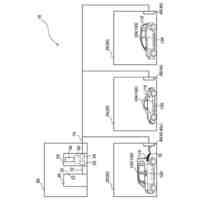
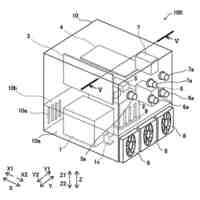
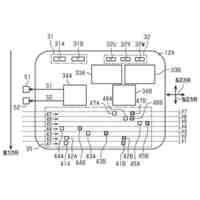
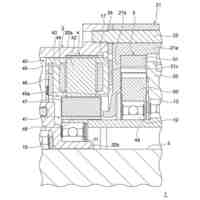
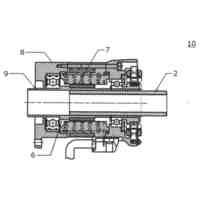
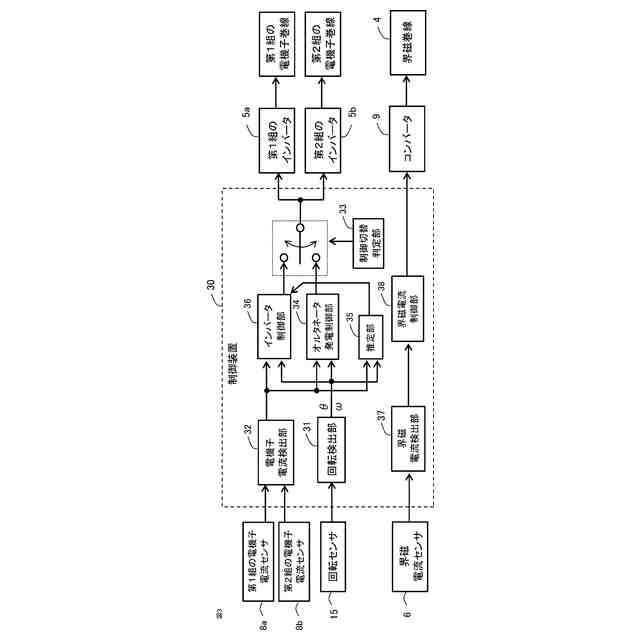
実施の形態1に係る回転電機及び回転電機の制御装置の概略構成図である。
実施の形態1に係る第1組の電機子巻線と第2組の電機子巻線との位相差を説明する図である。
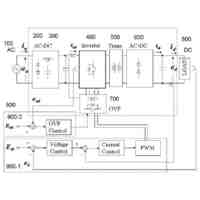
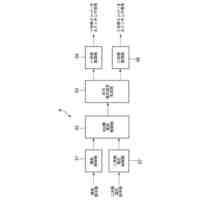
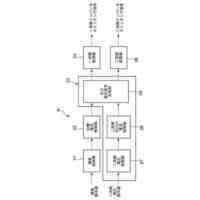
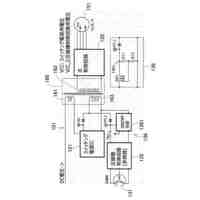
実施の形態1に係る回転電機の制御装置の概略ブロック図である。
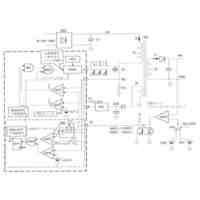
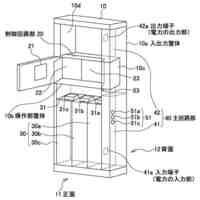
実施の形態1に係る回転電機の制御装置のハードウェア構成図である。
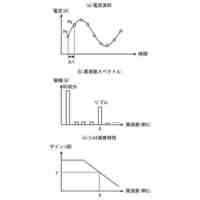
実施の形態1に係るオルタネータ発電制御の実行時の電機子巻線の電流の挙動を説明するタイムチャートである。
実施の形態1に係る電流ベクトルの電気角1次成分を説明する図である。
実施の形態1に係る電流ベクトルの電気角5次成分を説明する図である。
実施の形態1に係る電流ベクトルの電気角1次成分を説明する図である。
実施の形態1に係る電流ベクトルの電気角5次成分を説明する図である。
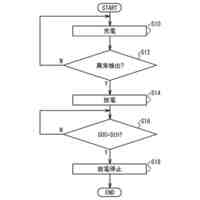
実施の形態1に係る電流とスイッチング素子のオンオフの挙動を説明するタイムチャートである。
実施の形態1に係る電気角1次成分と電気角5次成分との位相差の変化によるスイッチング素子のオンオフタイミングの変化を説明するタイムチャートである。
実施の形態1に係る電流ベクトルと電圧ベクトルとの位相差を説明する図である。
実施の形態1に係る電気角1次成分と電気角5次成分との間の相対位相及び振幅比と、位相ずらし量との関係を説明する図である。
実施の形態1に係る電気角1次成分と電気角5次成分との間の振幅比と、位相ずらし量との簡略化した関係を説明する図である。
実施の形態1に係る電流が電気角1次成分のみの場合の母線電流の挙動を説明するタイムチャートである。
実施の形態1に係る電流が電気角1次成分及び電気角5次成分の場合の母線電流の挙動を説明するタイムチャートである。
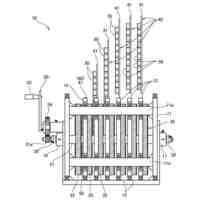
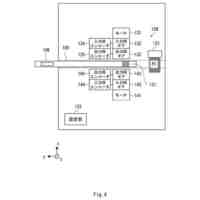
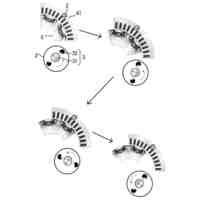
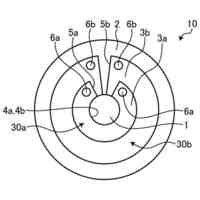
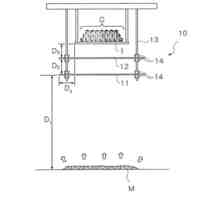
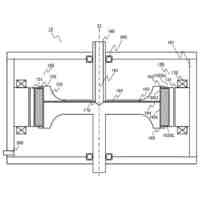
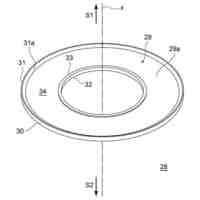
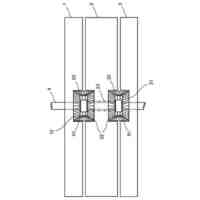
実施の形態1に係る車両用の発電電動機とされた回転電機の模式図である。
実施の形態2に係る第1組の電機子巻線と第2組の電機子巻線との位相差を説明する図である。
実施の形態2に係る電流ベクトルの電気角1次成分を説明する図である。
実施の形態2に係る電流ベクトルの電気角3次成分を説明する図である。
実施の形態2に係る電流ベクトルの電気角1次成分を説明する図である。
実施の形態2に係る電流ベクトルの電気角3次成分を説明する図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ニデック株式会社
モータ
11日前
個人
発電装置
5日前
個人
電流制御形AC-DC電源
4日前
キヤノン株式会社
電源装置
1か月前
キヤノン株式会社
電源装置
5日前
個人
ステッピングモータ実習装置
18日前
株式会社竹中工務店
避雷設備
1か月前
カヤバ株式会社
モータ制御装置
今日
サンデン株式会社
電力変換装置
12日前
トヨタ自動車株式会社
駆動装置
7日前
カヤバ株式会社
モータ制御装置
今日
サンデン株式会社
電力変換装置
12日前
トヨタ自動車株式会社
充電方法
25日前
個人
回転力発生装置
3日前
日産自動車株式会社
回転電機
7日前
株式会社エスイー
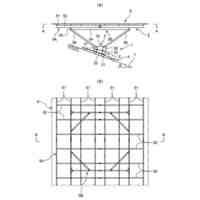
上載物の支持装置
1か月前
トヨタ自動車株式会社
電池システム
10日前
新電元工業株式会社
充電装置
25日前
ダイハツ工業株式会社
充電システム
6日前
AGC株式会社
太陽電池モジュール
1か月前
ミツミ電機株式会社
電源回路
6日前
三菱電機株式会社
回転子および電動機
1か月前
シャープ株式会社
冷蔵庫
12日前
住友金属鉱山株式会社
遮熱装置
26日前
富士電機株式会社
電力変換装置
今日
株式会社デンソー
電源装置
13日前
株式会社ジェイテクト
モータ装置
28日前
株式会社日立製作所
回転電機
18日前
ミネベアミツミ株式会社
回転機器
18日前
ミネベアミツミ株式会社
回転機器
18日前
ミネベアミツミ株式会社
回転機器
18日前
ミネベアミツミ株式会社
回転機器
18日前
個人
延線補助具
3日前
株式会社ゲットクリーンエナジー
発電機
1か月前
多摩川精機株式会社
逆起電圧可変モータ
1か月前
トヨタ自動車株式会社
電力管理システム
10日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ