TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025097840
公報種別
公開特許公報(A)
公開日
2025-07-01
出願番号
2023214284
出願日
2023-12-19
発明の名称
車両の減速支援装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B60W
30/16 20200101AFI20250624BHJP(車両一般)
要約
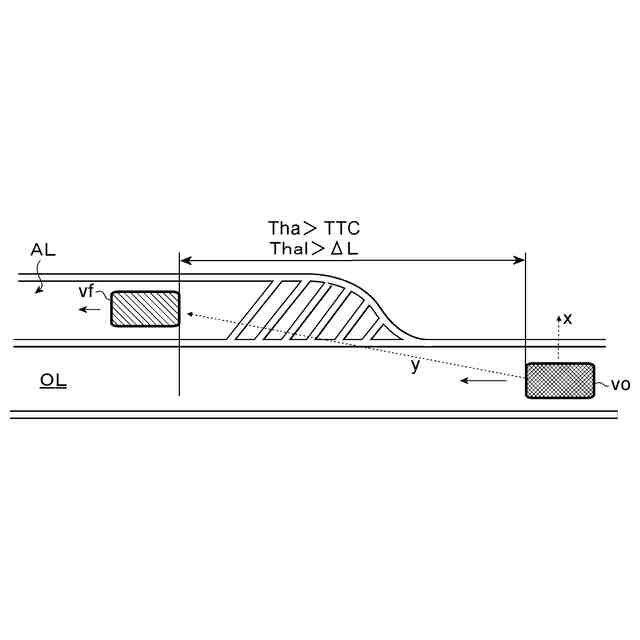
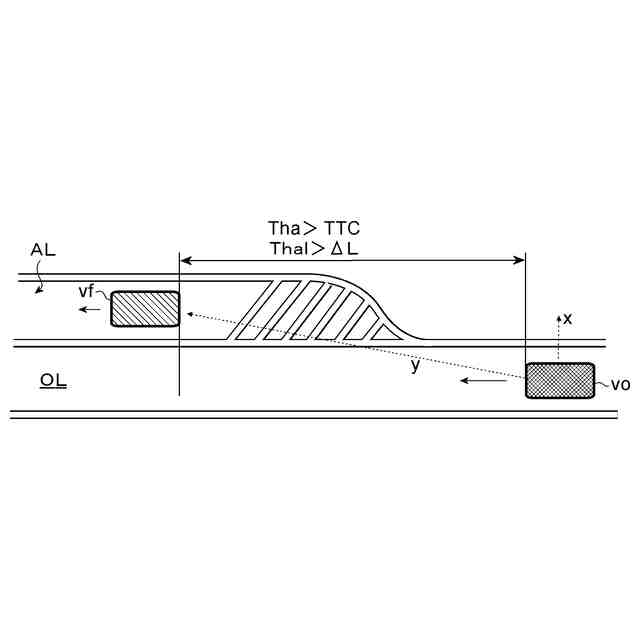
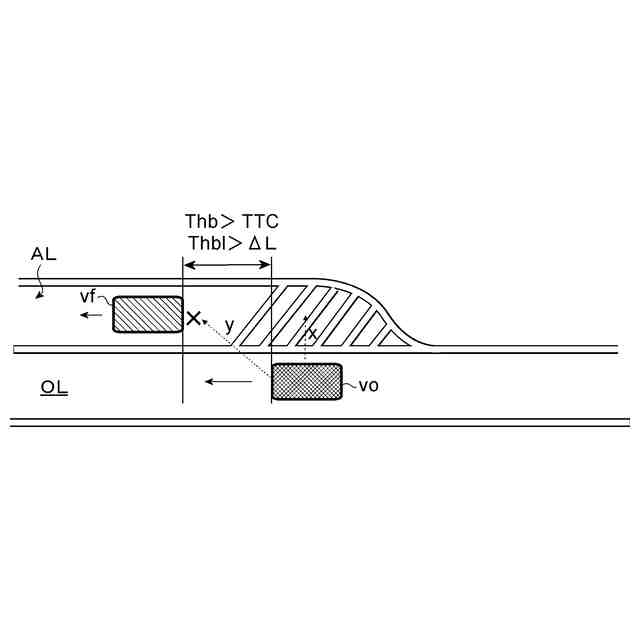
【課題】 自車の走行中の位置よりも前方で道路が拡幅されて設けられる右折用又は左折用車線や追加された車線である前方追加車線上に、先行車が存在しているとき、自車に於いて前方追加車線が隣接車線として認識される前に、先行車の存在下に於ける減速支援が開始されるようにする。
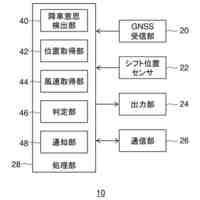
【解決手段】 車両の減速支援装置50は、自車voの走行中の自車線OL上を外れて自車の前方の所定範囲AL内に先行車vfが存在しているか否かを判定する先行車判定手段と、先行車の存在時に所定の条件の成立の下で自車を減速する減速制御手段とを含む。
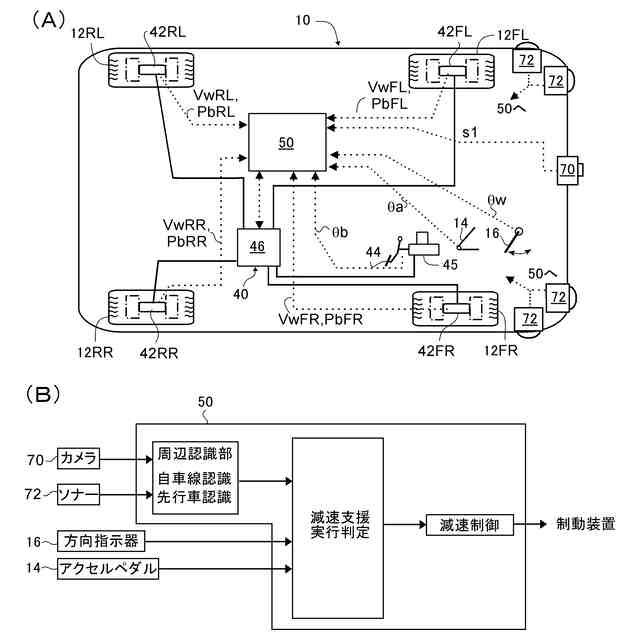
【選択図】 図2
特許請求の範囲
【請求項1】
車両の減速支援装置であって、
自車の走行中の自車線上を外れて前記自車の前方の所定範囲内に先行車が存在しているか否かを判定する先行車判定手段と、
前記先行車の存在時に所定の条件の成立の下で前記自車を減速する減速制御手段と
を含む装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動車等の車両の運転支援装置に係り、より詳細には、道路が拡幅するシーンで追加された車線に先行車が存在するときの減速支援を実行する装置に係る。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
車両の運転支援の一つとして、自車の走行する自車線に隣接する隣接車線に先行車が走行としている状況に於いて、種々の態様にて減速操作や車間距離の制御を実行するシステムが提案されている。例えば、特許文献1に於いては、隣接車線を走行する先行車両の横位置が基準横位置に到達すると、先行車両と自車両との車間距離を確保する制御を行うことが提案されている。また、特許文献2に於いては、自車両のウィンカが点滅しており、自車両の隣接車線への侵入量が閾値を超えた場合に、自車両が車線変更すると判定し、隣接車線を走行する他車両を先行車両に設定し、車間距離を維持するように運転支援制御(エンジン制御及びブレーキ制御)を実施することが提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-61552
特開2014-201159
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、自車の走行する自車線に隣接する隣接車線に先行車が存在している状況で減速支援が実行される場合、かかる支援は、一般に、自車線と隣接車線とが検出され、検出された隣接車線に先行車の存在が確認されると、適宜設定される所定の条件の成立の下で開始される。かかる構成に於いては、自車の走行中の位置よりも前方で道路が拡幅されて右折用又は左折用車線が設けられている場合や車線数追加される場合には、右折用又は左折用車線や追加された車線(以下、総じて「前方追加車線」と称する。)は、その近くまで自車が到達して、自車の隣接車線の認識範囲に入らないと、隣接車線として検出されないので、前方追加車線にいる先行車が検出されても、自車が追加車線の近くに到達し、追加車線を隣接車線として検出するまで、隣接車線に先行車が存在していると認識されず、その分、隣接車線が存在している場合よりも減速支援の開始が遅れることとなる(減速支援は、自車が前方追加車線に並走するようになってから或いは車線変更して先行車の後方に付いた後で実行され得る)。従って、前方追加車線に先行車がいる場合には、前方追加車線が隣接車線として検出されていなくても、先行車の存在下に於ける減速支援が開始されるようにすれば、支援が速やかに実行され、その作用をより効果的なものとすることができる。
【0005】
上記の事情に鑑み、本発明の主な課題は、自車の走行中の位置よりも前方で道路が拡幅されて設けられる前方追加車線上に、先行車が存在しているとき、自車に於いて前方追加車線が隣接車線として認識される前に、先行車の存在下に於ける減速支援が開始されるようにすることである。
【課題を解決するための手段】
【0006】
本発明によれば、上記の課題は、車両の減速支援装置であって、
自車の走行中の自車線上を外れて前記自車の前方の所定範囲内に先行車が存在しているか否かを判定する先行車判定手段と、
前記先行車の存在時に所定の条件の成立の下で前記自車を減速する減速制御手段と
を含む装置によって達成される。
【0007】
上記の構成に於いて、自車の走行中の自車線の認識、及び、自車線上を外れて自車の前方の所定範囲内に存在している先行車の認識は、車載カメラ、ミリ波レーダ等の任意の周辺認識手段を用いて実行可能である。「自車の前方の所定範囲」とは、先行車がその範囲に存在しているときには、自車の減速を実施した方がよいと考えられる範囲であり、具体的には、先行車との相対位置又は更に相対速度に基づいて任意の手法にて設定されてよい。先行車との相対位置及び相対速度の検出も上記の如き任意の周辺認識手段を用いて実行可能である。
【0008】
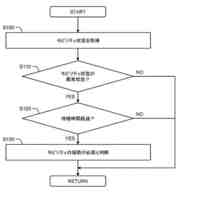
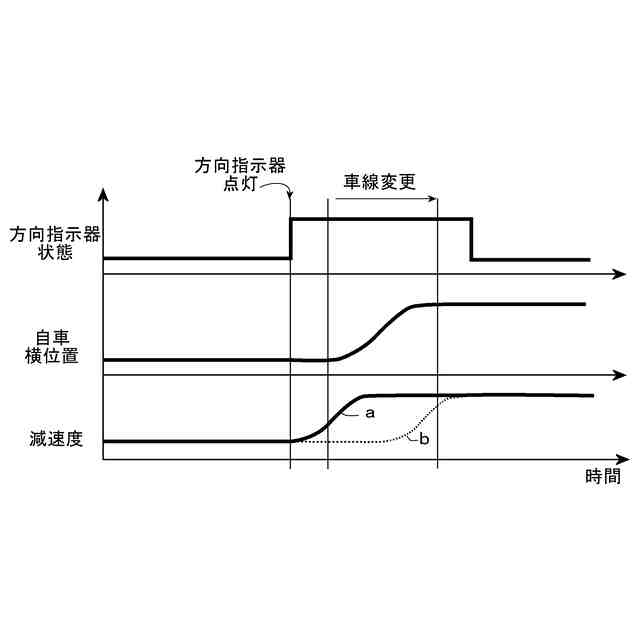
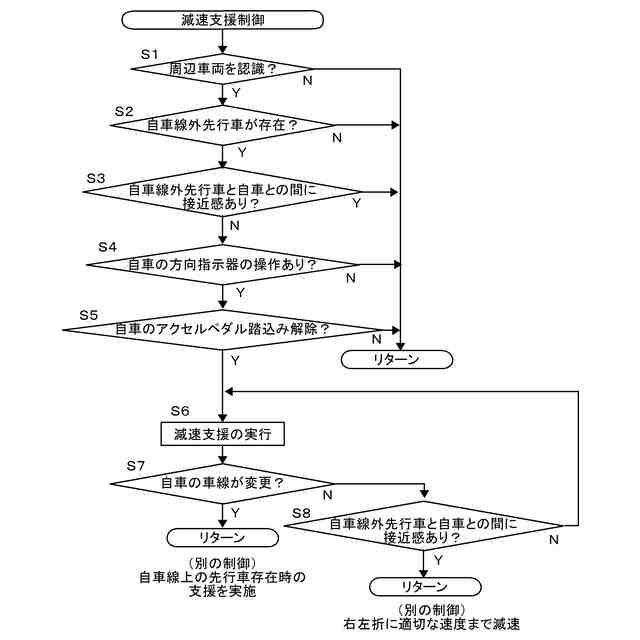
また、「減速制御手段」に於いて、先行車の存在時の自車の減速を実行するために成立すべき「所定の条件」とは、要すれば、自車の運転者が、自車の車線変更により、自車を、検出された先行車の後方へ付こうとする意図を有していると判断される条件であり、任意の態様にて適宜設定されてよい。具体的には、例えば、一つの態様に於いては、先行車の方向へ方向指示器が操作され、アクセルペダルの踏込みが解除されて運転者が加速しないこと又は減速することを意図していると判断されるとき、上記の所定の条件が成立したと判定されてよい。或いは、別の態様に於いては、先行車の方向への方向指示器の操作及びアクセルペダルの踏込みの解除に加えて、先行車の後方へ自車が入り込むのに充分な余裕があることが更に条件として加えられてよい(この条件が加わるのは、先行車の後方に自車が入り込む余裕がないほど、自車が先行車に接近している場合には、通常、自車は車線変更を実行しないためである。)。先行車の後方へ自車が入り込むのに充分な余裕があるか否かは、先行車と自車との進行方向の相対距離、又は、相対距離と相対速度とから算出される衝突予測時間(TTC-Time To Collision)が適宜設定される所定値以上あるか否かで判断されてよい。
【0009】
上記の本発明の装置に於いて実施される減速制御に於いては、制御開始が比較的早期となるので、実行される減速度の大きさは、比較的小さくてよく、運転者に違和感がなく、安心感を与えられる程度に設定されてよい。具体的な減速度の大きさは、適合により設定されてよい。
【0010】
上記の本発明の装置による減速制御は、開始後に自車が車線変更をすると、解除されてよい。車線変更後は、自車線上に先行車が存在する場合の運転支援が実行されてよい。また、上記の本発明の装置による減速制御は、開始後に先行車の後方へ自車が入り込むのに充分な余裕がなくなったと判定された場合も解除されてよい。解除後は、任意の態様の運転支援が実行されてよい。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
モータ
2日前
トヨタ自動車株式会社
電極体
1日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
撮像方法
今日
トヨタ自動車株式会社
管理装置
今日
トヨタ自動車株式会社
電動車両
今日
トヨタ自動車株式会社
通知装置
今日
トヨタ自動車株式会社
電動車両
今日
トヨタ自動車株式会社
電動車両
今日
トヨタ自動車株式会社
記録装置
1日前
トヨタ自動車株式会社
接続構造
今日
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
監視装置
今日
トヨタ自動車株式会社
水素タンク
今日
トヨタ自動車株式会社
電気自動車
1日前
トヨタ自動車株式会社
電池パック
2日前
トヨタ自動車株式会社
電気自動車
今日
トヨタ自動車株式会社
電気自動車
2日前
トヨタ自動車株式会社
電磁継電器
1日前
トヨタ自動車株式会社
シフト装置
2日前
トヨタ自動車株式会社
電気自動車
2日前
トヨタ自動車株式会社
昇降圧回路
今日
トヨタ自動車株式会社
衝撃吸収構造
今日
トヨタ自動車株式会社
表示制御装置
今日
トヨタ自動車株式会社
車両下部構造
今日
トヨタ自動車株式会社
車両下部構造
今日
トヨタ自動車株式会社
車両下部構造
今日
トヨタ自動車株式会社
異常検出装置
1日前
トヨタ自動車株式会社
情報処理装置
2日前
トヨタ自動車株式会社
充電システム
今日
トヨタ自動車株式会社
電気システム
今日
トヨタ自動車株式会社
情報報知装置
今日
トヨタ自動車株式会社
車両後部構造
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ