TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025070051
公報種別
公開特許公報(A)
公開日
2025-05-02
出願番号
2023180090
出願日
2023-10-19
発明の名称
作業車両の制御方法、作業車両用制御プログラム、作業車両用制御システム及び作業システム
出願人
ヤンマーホールディングス株式会社
代理人
個人
,
個人
,
個人
主分類
A01B
69/00 20060101AFI20250424BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業地に対する作業効率の向上を図ることが可能な作業車両の制御方法、作業車両用制御プログラム、作業車両用制御システム及び作業システムを提供する。
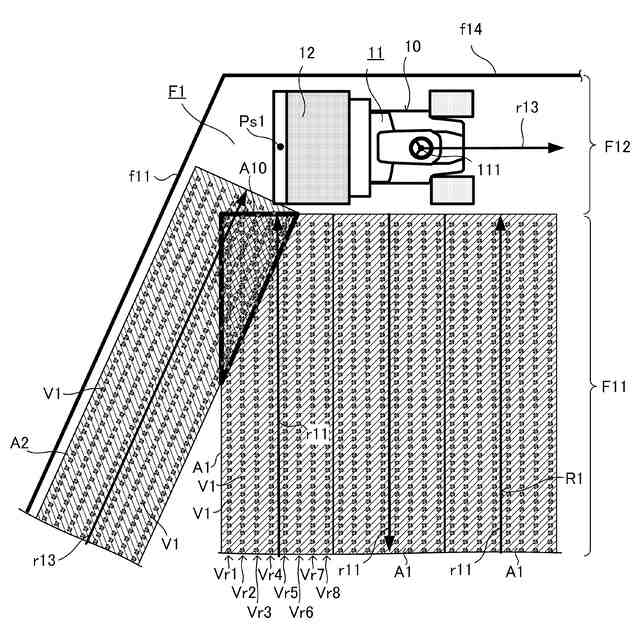
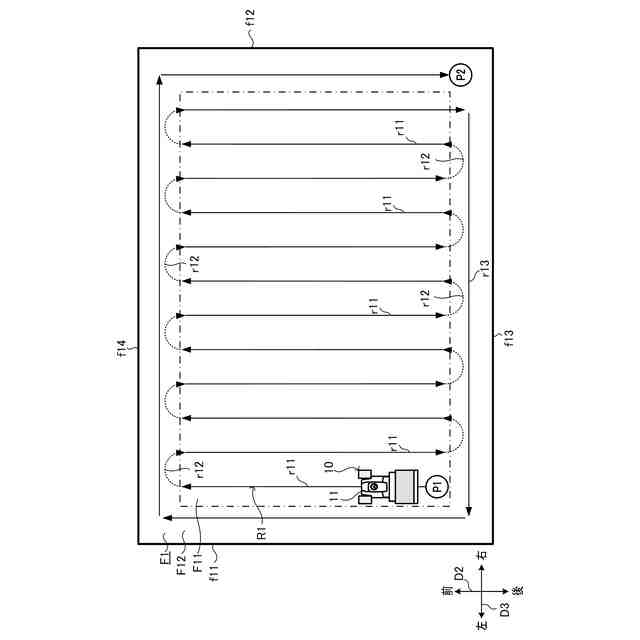
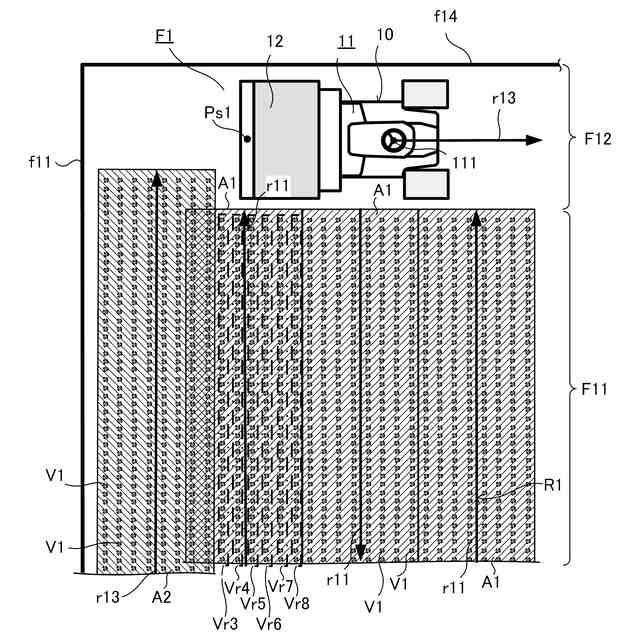
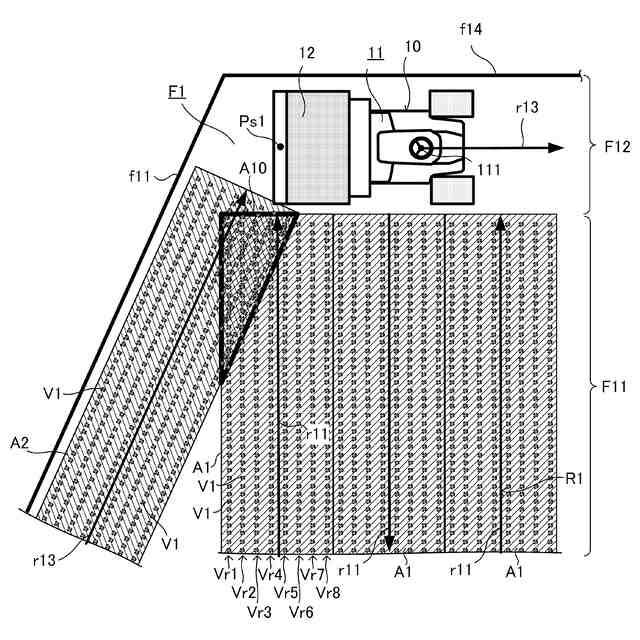
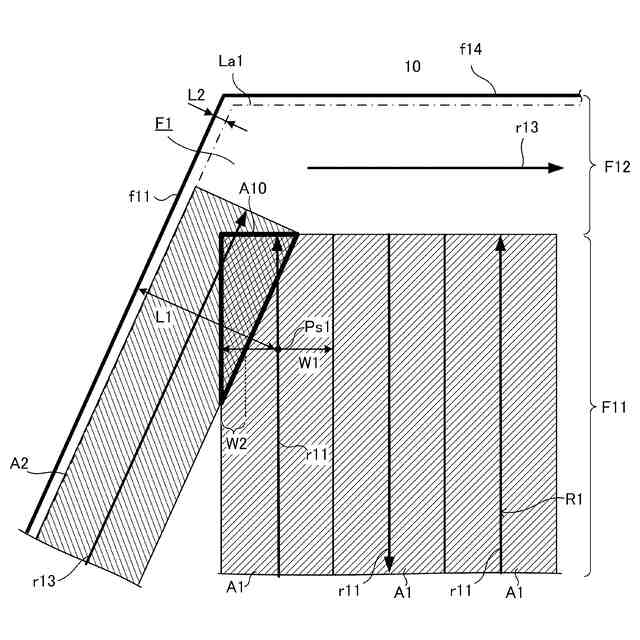
【解決手段】作業車両10の制御方法は、作業地F1を走行しつつ、進行方向と交差する方向に並ぶ複数条の作業列Vr1~Vr8に対して作業可能な作業車両10の制御方法である。この制御方法は、作業地F1の外形線に基づく外形線情報を取得することと、外形線情報に基づいて、複数条の作業列Vr1~Vr8の一部について非作業とする条止め制御を実施するための条止め位置を作業地F1内に設定することと、を有する。
【選択図】図7
特許請求の範囲
【請求項1】
作業地を走行しつつ、進行方向と交差する方向に並ぶ複数条の作業列に対して作業可能な作業車両の制御方法であって、
前記作業地の外形線に基づく外形線情報を取得することと、
前記外形線情報に基づいて、前記複数条の作業列の一部について非作業とする条止め制御を実施するための条止め位置を前記作業地内に設定することと、を有する、
作業車両の制御方法。
続きを表示(約 1,000 文字)
【請求項2】
前記作業地は、作業方向に沿って前記作業車両を往復走行させる内側領域と、前記内側領域の外周に沿って前記作業車両を周回走行させる外周領域と、を含み、
前記外形線情報に加えて、前記外周領域における前記作業車両の周回数に基づいて、前記条止め位置を設定する、
請求項1に記載の作業車両の制御方法。
【請求項3】
前記外形線情報は、前記作業地の外形線を基準に、前記作業地の内側への距離であるマージン値によって規定され、前記作業車両のはみ出しを許容する限界位置となる許容限界線の情報を含み、
前記条止め位置は、前記許容限界線に基づいて設定される、
請求項1又は2に記載の作業車両の制御方法。
【請求項4】
前記許容限界線の位置は変更可能であって、
前記条止め位置は、前記許容限界線の位置の変更に伴って変更される、
請求項3に記載の作業車両の制御方法。
【請求項5】
前記条止め制御の開始位置及び終了位置に応じて前記作業車両の移動速度を制御する、
請求項1又は2に記載の作業車両の制御方法。
【請求項6】
少なくとも前記条止め制御の開始位置において、前記作業車両の移動速度を所定速度以下に抑える、
請求項5に記載の作業車両の制御方法。
【請求項7】
前記外形線情報に加えて、前記作業車両における作業幅に基づいて、前記条止め位置を設定する、
請求項1又は2に記載の作業車両の制御方法。
【請求項8】
前記外形線情報に含まれる特定線から、前記作業車両に対して設定される基準点までの距離に基づいて、前記条止め位置を設定する、
請求項1又は2に記載の作業車両の制御方法。
【請求項9】
前記条止め位置を設定する際、当該条止め位置において前記複数条の作業列のうち非作業とすべき作業列の数に相当する条止め幅を指定すること、を更に有する、
請求項1又は2に記載の作業車両の制御方法。
【請求項10】
前記条止め幅として複数の値が指定される場合には、当該複数の値のうち最大値を前記条止め幅として指定する、
請求項9に記載の作業車両の制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業地を走行しつつ、作業地内で作業を行う作業車両の制御方法、作業車両用制御プログラム、作業車両用制御システム及び作業システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
関連技術として、作業地(圃場)を走行する走行機体と、作業を行う作業機(作業装置)と、を備え、目標走行経路に沿って作業走行する作業車両(走行作業機)が知られている(例えば、特許文献1参照)。関連技術に係る作業車両では、経路設定部が、人為操作によって走行機体が走行するティーチング走行に基づくティーチング経路を作業地の一端側に設定した後に、ティーチング経路と平行な目標走行経路を作業地の他端側に設定し、かつ、目標走行経路に沿った走行機体の走行中に取得された既走行位置に基づいて、走行機体が目標走行経路を走行した後に作業走行するための後工程用目標走行経路をティーチング経路の位置する側に設定する。
【0003】
この作業車両によれば、例えば、ティーチング経路と重複する後工程用目標走行経路に沿って作業走行が行われた後に、走行機体が作業地の畦際に沿って作業走行し、作業地を周回する作業(田植え作業)が行われる。これに際し、作業地における畦際周囲に沿って作業幅が確保される必要があるため、後工程用目標走行経路に沿って作業走行が行われる際の作業幅のうち、畦際周囲に沿って確保されるべき作業幅と重複する部分については、作業機の条クラッチを切り操作する条止め制御が実施される。
【先行技術文献】
【特許文献】
【0004】
特開2020-000066号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記関連技術の構成では、条止め制御を実施するための適切な位置が特定されないので、作業地の全域に対する作業効率の更なる向上が望まれる。
【0006】
本発明の目的は、作業地に対する作業効率の向上を図ることが可能な作業車両の制御方法、作業車両用制御プログラム、作業車両用制御システム及び作業システムを提供することにある。
【課題を解決するための手段】
【0007】
本発明の一の局面に係る作業車両の制御方法は、作業地を走行しつつ、進行方向と交差する方向に並ぶ複数条の作業列に対して作業可能な作業車両の制御方法であって、前記作業地の外形線に基づく外形線情報を取得することと、前記外形線情報に基づいて、前記複数条の作業列の一部について非作業とする条止め制御を実施するための条止め位置を前記作業地内に設定することと、を有する。
【0008】
本発明の他の局面に係る作業車両の制御方法は、作業地を走行しつつ、進行方向と交差する方向に並ぶ複数条の作業列に対して作業可能な作業車両の制御方法であって、前記作業地の外形線に基づく外形線情報を取得することと、前記外形線情報に基づいて、作業方向に沿って前記作業車両を往復走行させる内側領域と、前記内側領域の外周に沿って前記作業車両を周回走行させる外周領域と、の重複領域を求めることと、を有する。
【0009】
本発明の一の局面に係る作業車両用制御プログラムは、前記作業車両の制御方法を、1以上のプロセッサに実行させるためのプログラムである。
【0010】
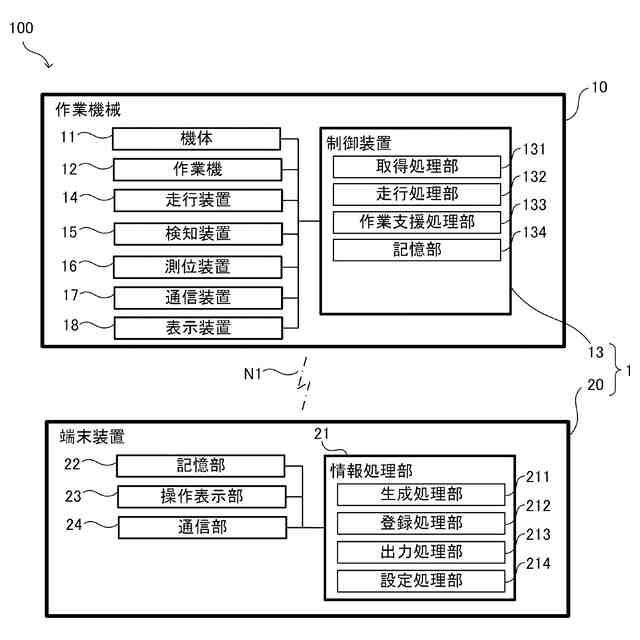
本発明の一の局面に係る作業車両用制御システムは、作業地を走行しつつ、進行方向と交差する方向に並ぶ複数条の作業列に対して作業可能な作業車両に用いられる。前記作業車両用制御システムは、取得処理部と、作業支援処理部と、を備える。前記取得処理部は、前記作業地の外形線に基づく外形線情報を取得する。前記作業支援処理部は、前記外形線情報に基づいて、前記複数条の作業列の一部について非作業とする条止め制御を実施するための条止め位置を前記作業地内に設定する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
ルアー
21日前
個人
播種装置
18日前
個人
虫の生け捕り具
6日前
個人
プランターセット
25日前
個人
生命力近親交配方法
25日前
個人
獣捕獲罠装置
28日前
個人
養殖システム
13日前
井関農機株式会社
作業車両
11日前
株式会社シマノ
釣竿
14日前
岡部株式会社
浮魚礁
6日前
株式会社アテックス
草刈機
1か月前
株式会社シマノ
釣竿
1か月前
個人
ペット用オムツカバー
1か月前
井関農機株式会社
収穫作業車両
7日前
個人
植物栽培装置
1か月前
個人
漁業支援装置及び方法
19日前
中国電力株式会社
巣撤去具
4日前
ウエダ産業株式会社
切断装置
14日前
株式会社パクマケ
植栽用遮光板
1か月前
株式会社フルトン
水中捕捉装置
1か月前
株式会社泰
愛玩動物用タワー家具
1か月前
個人
害虫捕獲、解放及び駆除装置
28日前
鹿島建設株式会社
レインガーデン
22日前
個人
落口枡用取付部材及び落口枡
22日前
第一衛材株式会社
ペット用おむつ
4日前
株式会社ササキコーポレーション
農作業機
20日前
個人
大型ペット用安定供給水やりシステム
1日前
OTIS株式会社
ルアー用スカート
18日前
株式会社クボタ
水田作業機
25日前
個人
ペット搬送用バッグの開放部カバー
1か月前
有限会社東北マシン・テクノ
穴開け装置
今日
株式会社和コーポレーション
肥料散布機
1か月前
株式会社クボタ
圃場作業機
13日前
株式会社シマノ
ルアー
20日前
株式会社トクイテン
青果物収穫装置
7日前
株式会社Personal AI
反射光拡散装置
25日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ