TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025041235
公報種別
公開特許公報(A)
公開日
2025-03-26
出願番号
2023148409
出願日
2023-09-13
発明の名称
信号解析方法及びレーダーシステム
出願人
株式会社カレアコーポレーション
,
国立大学法人富山大学
,
FCLコンポーネント株式会社
代理人
個人
主分類
G01S
13/34 20060101AFI20250318BHJP(測定;試験)
要約
【課題】 チャープ帯域幅に関わらず、距離分解能が高く、近距離での測距精度が高いレーダーシステムの提供。
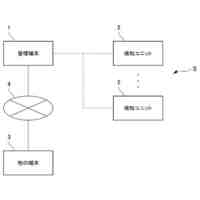
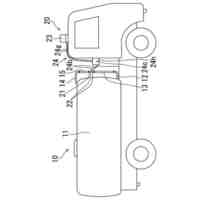
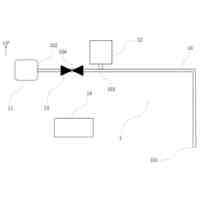
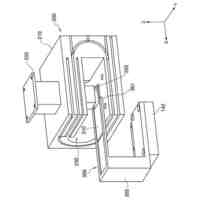
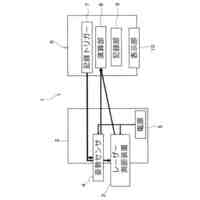
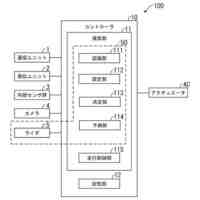
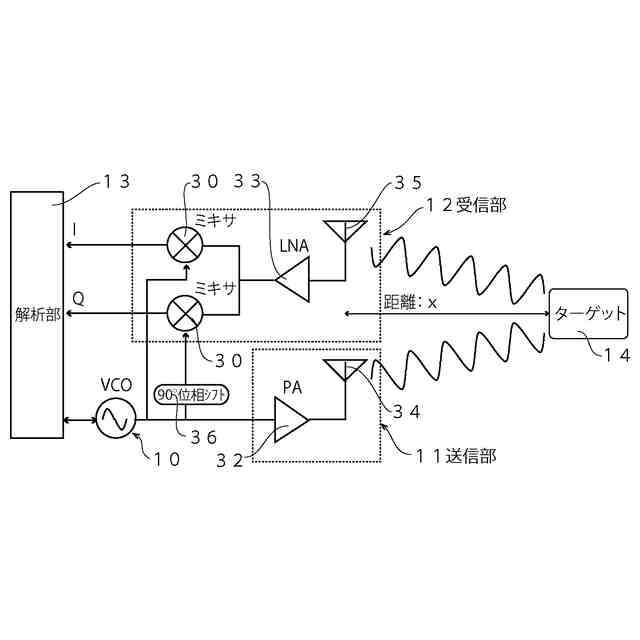
【解決手段】 送信手段1から測定対象までの距離又は運動速度を測定するためのレーダーシステムであって、周波数が一定の変調幅で周期的に増減するチャープ信号を生成し前記チャープ信号を進行波として空間に放射する送信手段1と、測定対象に反射された前記進行波を反射波として検出し、前記反射波と前記チャープ信号とでビート信号を生成する受信手段2と、前記受信手段2で生成されたビート信号から歪成分を除去した整形信号を生成する信号整形手段4と、前記整形信号から測定対象に反射された反射波の周波数を導く信号解析手段5とを備えるレーダーシステム。
【選択図】 図1
特許請求の範囲
【請求項1】
レーダーシステムで測定対象までの距離又は運動速度を測定するための信号解析方法であって、
周波数が一定の変調幅で周期的に増減するチャープ信号を生成し、前記チャープ信号を進行波として空間に放射するステップと、
測定対象に反射された前記進行波を反射波として検出し、前記反射波と前記チャープ信号とでビート信号を生成するステップと、
前記受信手段で生成された前記ビート信号から歪成分を除去した整形信号を生成するステップと、
前記整形信号の信号解析を行い最大振幅を持つ周波数成分を前記測定対象に反射された特定周波数であるとして導くステップと、
を行い、
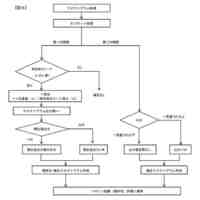
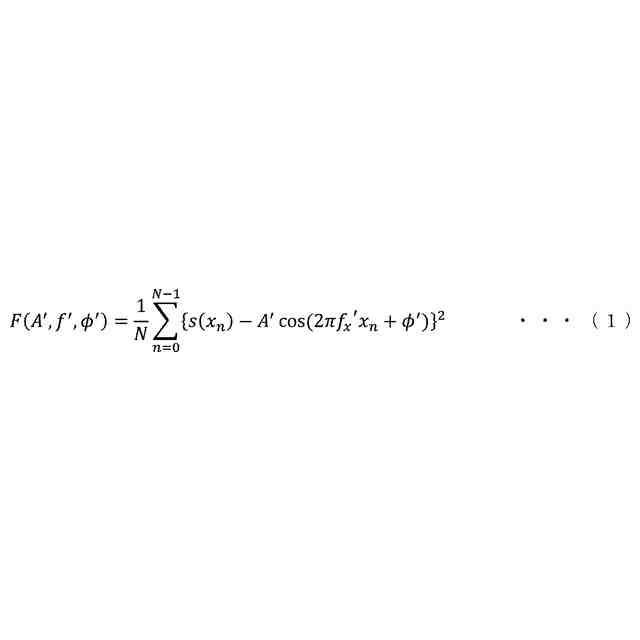
前記信号解析は、前記整形信号と、周波数f’、位相φ’及び振幅A’をパラメータとして表される正弦波モデル信号との差の二乗和が最小値になるように前記パラメータそれぞれの初期値を求め、求めた各初期値から非線形方程式の最適解に収束させるものであって、
前記整形信号が一次元の計測値s(x
n
)でありデータ個数をNとする下記数式(1)の右辺が最小値になるような周波数f
x
’と位相φ’と振幅A’を求めること特徴とする信号解析方法。
TIFF
2025041235000016.tif
21
125
続きを表示(約 2,400 文字)
【請求項2】
レーダーシステムで測定対象までの距離又は運動速度を測定するための信号解析方法であって、
周波数が一定の変調幅で周期的に増減するチャープ信号を生成し、前記チャープ信号を進行波として空間に放射するステップと、
測定対象に反射された前記進行波を反射波として検出し、前記反射波と前記チャープ信号とでビート信号を生成するステップと、
前記受信手段で生成された前記ビート信号から歪成分を除去した整形信号を生成するステップと、
前記整形信号の信号解析を行い最大振幅を持つ周波数成分を前記測定対象に反射された特定周波数であるとして導くステップと、
を行い、
前記信号解析は、前記整形信号と、周波数f’、位相φ’及び振幅A’をパラメータとして表される正弦波モデル信号との差の二乗和が最小値になるように前記パラメータそれぞれの初期値を求め、求めた各初期値から非線形方程式の最適解に収束させるものであって、
前記パラメータのうち周波数f’と位相φ’について最急降下法を適用して収束させてから減速法を取り入れたニュートン法を適用して収束させ、その後、前記パラメータのうち振幅A’について最急降下法を適用して収束させてから減速法を取り入れたニュートン法を適用して収束させ、
前記整形信号が一次元の計測値s(x
n
)でありデータ個数をNとする下記数式(1)の右辺が最小値になるような周波数f
x
’と位相φ’と振幅A’を求めること特徴とする信号解析方法。
TIFF
2025041235000017.tif
21
125
【請求項3】
測定対象までの距離又は/及び運動速度を測定するためのレーダーシステムであって、
周波数が一定の変調幅で周期的に増減するチャープ信号を生成し、前記チャープ信号を進行波として空間に放射する送信手段と、
測定対象に反射された前記進行波を反射波として検出し、前記反射波と前記チャープ信号とでビート信号を生成する受信手段と、
前記受信手段で生成された前記ビート信号から歪成分を除去した整形信号を生成する信号整形手段と、
前記整形信号の信号解析に基づき、最大振幅を持つ周波数成分を前記測定対象に反射された特定周波数であるとして導く信号解析手段と、
を備えることを特徴とするレーダーシステム。
【請求項4】
前記信号解析手段は、前記整形信号と、周波数f’、位相φ’及び振幅A’をパラメータとして表される正弦波モデル信号との差の二乗和が最小値になるように前記パラメータそれぞれの初期値を求め、求めた各初期値から非線形方程式の最適解に収束させる信号解析手段であって、
前記整形信号が一次元の計測値s(x
n
)でありデータ個数をNとする下記数式(1)の右辺が最小値になるような周波数f
x
’と位相φ’と振幅A’を求めることを特徴とする請求項3に記載のレーダーシステム。
TIFF
2025041235000018.tif
21
125
【請求項5】
前記信号解析手段は、前記整形信号と、周波数f’、位相φ’及び振幅A’をパラメータとして表される正弦波モデル信号との差の二乗和が最小値になるように前記パラメータそれぞれの初期値を求め、求めた各初期値から非線形方程式の最適解に収束させる信号解析手段であって、
前記パラメータのうち周波数f’と位相φ’について最急降下法を適用して収束させてから減速法を取り入れたニュートン法を適用して収束させ、その後、前記パラメータのうち振幅A’について最急降下法を適用して収束させてから減速法を取り入れたニュートン法を適用して収束させ、
前記整形信号が一次元の計測値s(x
n
)でありデータ個数をNとする下記数式(1)の右辺が最小値になるような周波数f
x
’と位相φ’と振幅A’を求めることを特徴とする請求項3に記載のレーダーシステム。
TIFF
2025041235000019.tif
21
125
【請求項6】
前記信号整形手段は、前記ビート信号におけるチャープ時間帯について非負最小二乗法を用いた線形化処理により前記整形信号を生成することを特徴とする請求項3に記載のレーダーシステム。
【請求項7】
前記信号整形手段は、
前記ビート信号におけるチャープ時間帯の歪領域を無効解析区間として除去する歪除去処理を行う歪除去手段と、
前記無効解析区間除去後のビート信号の残存歪を補正する歪補正手段、又は/及び
前記歪除去処理で生じる欠落部分に、歪が抑制された理想波形に近似する波形を連結し整形信号を生成する波形充当手段と、
を備えることを特徴とする請求項3に記載のレーダーシステム。
【請求項8】
前記送信手段は、一定の周波数帯域で周期的に増減する三角波形又は鋸刃状波形のチャープ信号を生成し、当該チャープ信号を進行波として空間に放射することを特徴とする請求項3に記載のレーダーシステム。
【請求項9】
前記送信手段から測定対象までの距離を前記信号解析手段が導いた前記特定周波数から算出する演算手段を備え、
前記信号解析手段で導かれた周波数、又は前記演算手段で導かれた距離に生体的揺らぎが存在するものを生体情報として検出することを特徴とする請求項3に記載のレーダーシステム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、測定対象たる物体(以下、「ターゲット」と記す。)までの距離を、非接触で高分解能且つ高精度に測定することができる信号解析方法及びレーダーシステムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来、マイクロ波やミリ波などを利用した距離測定として、FMCW(Frequency Modulated Continuous Wave)レーダなどのレーダシステムが知られている。
FMCWレーダは、周波数掃引した連続波(以下、「チャープ信号」と記す。)を発信し、その発信信号と反射信号で生成されたビート信号を検出し、当該ビート信号を解析してターゲットまでの距離又は運動速度を測定するものである。
【先行技術文献】
【特許文献】
【0003】
特開2007-093576号公報
国際公開第2009/138056号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
FMCWレーダーの距離分解能は、一般的に、チャープ帯域幅の逆数で定まるチャープ信号の周波数に依存し、理論的には光速とチャープ帯域幅から導かれる理論値相当の距離分解能を持つとされてはいる。ところが、実際には送受信アンテナ間の結合によるビート信号の歪によって測距精度が悪化し、一般的に採用されている解析方法では、理論値相当の分解能で周波数や距離を特定することはできない。
例えば、ビート信号の解析では一般的に高速フーリエ変換(Fast Fourier Transform;以下、「FFT」と記す。)が用いられるが、FFTでは、サイドローブの存在や変調周波数領域の欠落(飛越)などが原因で、最小探知距離が長く、近距離に存在するターゲットの区別及び類別、並びに距離及び運動速度の測定が困難であるという問題があった。
【0005】
また、離散フーリエ変換(Discrete Fourier Transform;以下、「DFT」と記す。)における周波数ビン(レンジビン)の最小単位がチャープ信号の周波数に依存することから、その整数倍の周波数に対応した距離から外れた距離を正確に測ることができない。従って、そこから導かれるターゲットまでの距離やターゲットの運動速度などの測定についても、理論的に導かれるレベルを大きく下回る実態にある。
例えば生体情報を検出する場合において、ターゲットまでの距離は一般的に1m以内から数mの範囲であり、ターゲットの体表面の変位は一般的に呼吸が1~50mm、心拍が0.1mm~0.5mmである。しかも、実生活において生体情報の検出に応用する場合は高ノイズ環境下であることが多く、計測データに様々なノイズが重畳するため、生体情報自体を非接触で捕捉し、正確に計測することは極めて困難である。
【0006】
FMCWレーダーの距離分解能は、チャープ帯域幅を広げることで改善はするものの、電波の周波数帯域の利用効率が悪くなると言う問題がある。一方、チャープ帯域幅を狭くすると、距離分解能が悪化することはもとより、近距離での距離測定も困難となる。
【0007】
本開示は、上記従来の技術における課題に鑑みてなされたものであって、チャープ帯域幅に関わらず、距離分解能が高く、近距離での測距精度が高いレーダーシステムの提供を目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するためになされた本開示の一実施形態に係る信号解析方法は、レーダーシステムで測定対象までの距離又は/及び運動速度を測定するための信号解析方法であって、周波数が一定の帯域幅で周期的に増減するチャープ信号を生成し、前記チャープ信号を進行波として空間に放射するステップと、測定対象に反射された前記進行波を反射波として検出し、前記反射波と前記チャープ信号とでビート信号を生成するステップと、前記受信手段で生成された前記ビート信号から歪成分を除去した整形信号を生成するステップと、前記整形信号の信号解析を行い最大振幅を持つ周波数成分を前記測定対象に反射された特定周波数であるとして導くステップと、を行い、前記信号解析は、前記整形信号と、周波数f’、位相φ’及び振幅A’をパラメータとして表される正弦波モデル信号との差の二乗和が最小値になるように前記パラメータそれぞれの初期値を求め、求めた各初期値から非線形方程式の最適解に収束させるものであって、前記整形信号が一次元の計測値s(x
n
)でありデータ個数をNとする数式(1)の右辺が最小値になるような周波数f
x
’と位相φ’と振幅A’を求めること特徴とする。
TIFF
2025041235000002.tif
22
126
【0009】
前記信号解析は、前記整形信号と、周波数f’、位相φ’及び振幅A’をパラメータとして表される正弦波モデル信号との差の二乗和が最小値になるように前記パラメータそれぞれの初期値を求め、求めた各初期値から非線形方程式の最適解に収束させるものであって、前記パラメータのうち周波数f’と位相φ’について最急降下法を適用して収束させてから減速法を取り入れたニュートン法を適用して収束させ、その後、前記パラメータのうち振幅A’について最急降下法を適用して収束させてから減速法を取り入れたニュートン法を適用して収束させ、前記整形信号が一次元の計測値s(x
n
)でありデータ個数をNとする数式(1)の右辺が最小値になるような周波数f
x
’と位相φ’と振幅A’を求めること特徴とする信号解析方法。
【0010】
上記課題を解決するためになされた本開示の一実施形態に係るレーダーシステムは、測定対象までの距離又は/及び運動速度を測定するためのレーダーシステムであって、周波数が一定の帯域幅で周期的に増減するチャープ信号を生成し、前記チャープ信号を進行波として空間に放射する送信手段と、測定対象に反射された前記進行波を反射波として検出し、前記反射波と前記チャープ信号とでビート信号を生成する受信手段と、前記受信手段で生成された前記ビート信号から歪成分を除去した整形信号を生成する信号整形手段と、前記整形信号の信号解析を行い、最大振幅を持つ周波数成分を前記測定対象に反射された特定周波数であるとして導く信号解析手段と、を備えることを特徴とする。
前記送信手段は、一定の周波数帯域で周期的に増減する三角波形又は鋸刃状波形のチャープ信号を生成し、前記チャープ信号を進行波として空間に放射する構成を採用することができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
ユニパルス株式会社
力変換器
12日前
横浜ゴム株式会社
音響窓
14日前
三菱電機株式会社
計測器
6日前
株式会社豊田自動織機
産業車両
19日前
株式会社辰巳菱機
システム
今日
個人
センサーを備えた装置
16日前
株式会社国際電気
試験装置
26日前
日置電機株式会社
測定装置
13日前
日本精機株式会社
施工管理システム
16日前
IPU株式会社
距離検出装置
12日前
株式会社FRPカジ
FRP装置
2日前
株式会社東芝
センサ
15日前
富士レビオ株式会社
嵌合システム
5日前
大和製衡株式会社
組合せ計量装置
2日前
株式会社田中設備
報知装置
20日前
株式会社CAST
センサ固定治具
19日前
本多電子株式会社
超音波ソナー装置
7日前
オムロン株式会社
スイッチング装置
26日前
富士電機株式会社
半導体パッケージ
8日前
株式会社熊平製作所
刃物類判別装置
19日前
WOTA株式会社
液位検出システム
26日前
アズビル株式会社
火炎状態判定装置
13日前
個人
ヨウ素滴定を用いたアミノ酸の定量方法
23日前
トヨタ自動車株式会社
表面傷の検査方法
14日前
トヨタ自動車株式会社
データの補正方法
7日前
TDK株式会社
磁気検出システム
26日前
三和テッキ株式会社
架線の高さ、偏位測定装置
今日
已久工業股ふん有限公司
空気圧縮機構造
15日前
東ソー株式会社
クロマトグラムの形状判定方法
8日前
ミネベアミツミ株式会社
角度センサ
23日前
本田技研工業株式会社
外界認識装置
2日前
株式会社 ミックウェア
端末装置及びプログラム
21日前
大豊建設株式会社
鉛直精度測定装置
2日前
コニカミノルタ株式会社
光学特性測定装置
19日前
愛知時計電機株式会社
超音波流量計
12日前
ミネベアミツミ株式会社
角度センサ
23日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ