TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025004727
公報種別
公開特許公報(A)
公開日
2025-01-15
出願番号
2023179042
出願日
2023-10-17
発明の名称
糸掛ロボット
出願人
TMTマシナリー株式会社
代理人
弁理士法人ATEN
主分類
D01D
7/00 20060101AFI20250107BHJP(天然または人造の糸または繊維;紡績)
要約
【課題】糸掛ロボットによる糸掛け時に広い領域を監視可能とし、且つ、糸掛ロボットの走行時に検出部が他の装置等の邪魔になることを抑制する。
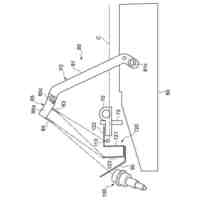
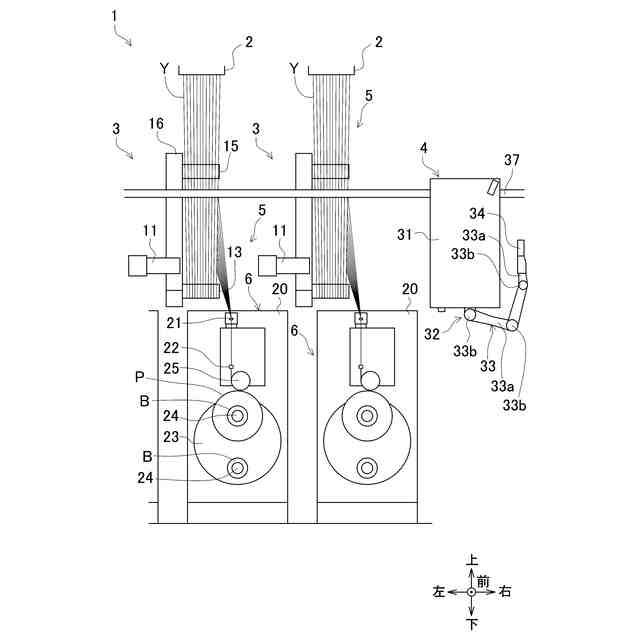
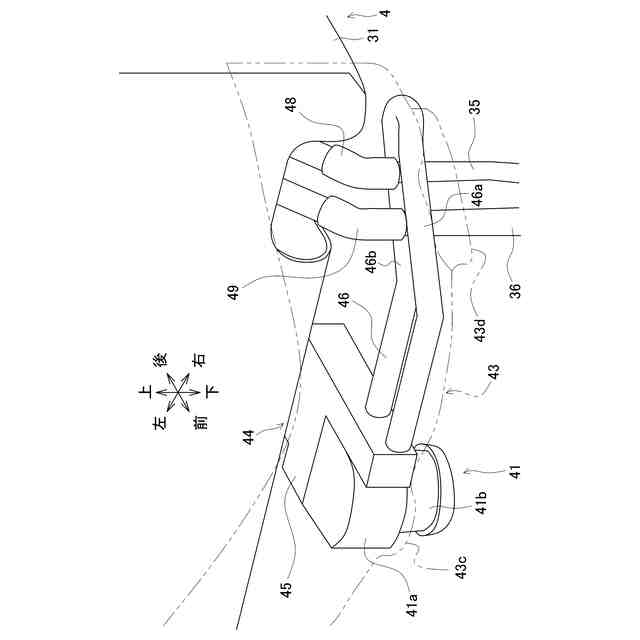
【解決手段】糸掛ロボット4は、ロボット本体31と、糸掛けを実行可能に構成された可動部32と、検出部41bと、移動部44とを備える。移動部44は、検出部41bを、可動部32による糸掛けが行われているときの糸掛位置と、糸掛位置よりも後側の走行位置との間で移動させることが可能に構成されている。
【選択図】図9
特許請求の範囲
【請求項1】
鉛直方向と交差する第1方向に並べて配置される複数の糸巻取機への糸掛けを実行可能に構成された糸掛ロボットであって、
鉛直方向及び前記第1方向の両方と直交する第2方向において前記複数の糸巻取機よりも一方側に配置された状態で、前記第1方向に走行可能に構成されたロボット本体と、
前記ロボット本体に取り付けられ、前記ロボット本体に対して所定の可動領域の中で動くことにより前記糸掛けを実行可能に構成された可動部と、
前記ロボット本体に取り付けられ、所定の第1検出領域の中に位置している物体を検出可能に構成された第1検出部と、
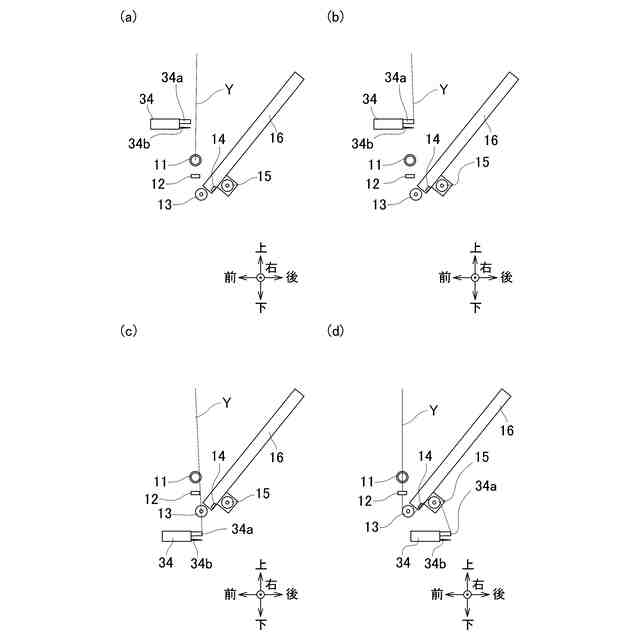
前記第1検出部を、前記可動部による糸掛けが行われているときの糸掛位置と、前記糸掛位置よりも前記第2方向における他方側の走行位置との間で移動させることが可能に構成された移動部と、を備える糸掛ロボット。
続きを表示(約 2,000 文字)
【請求項2】
前記第1検出部は、前記糸掛位置に位置しているときに、少なくとも一部が前記第2方向において前記ロボット本体の前記一方側の端よりも前記一方側に突出している、請求項1に記載の糸掛ロボット。
【請求項3】
前記第1検出部は、前記糸掛位置に位置しているときに、前記ロボット本体から前記第2方向における前記一方側に離隔して配置されている、請求項2に記載の糸掛ロボット。
【請求項4】
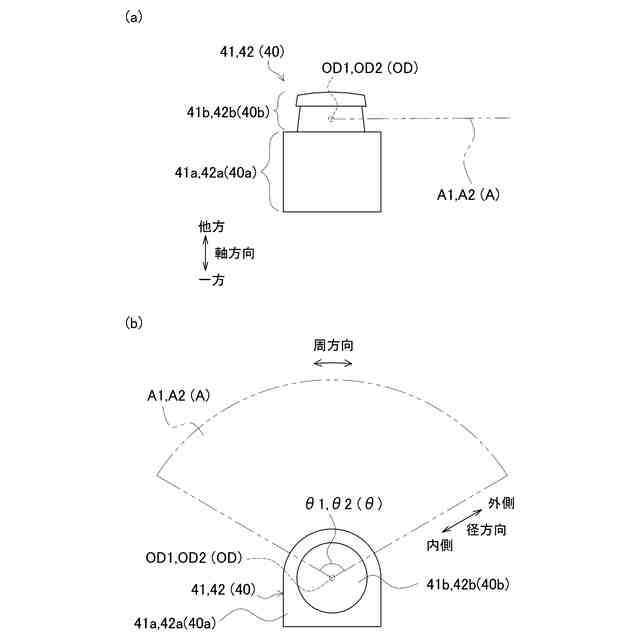
前記第1検出領域は、所定の第1検出原点を基準点として延び、
前記第1検出部が前記糸掛位置に位置しているときに、前記第1検出原点は、前記可動部の前記可動領域よりも前記第2方向における前記一方側に配置されている、請求項1~3のいずれかに記載の糸掛ロボット。
【請求項5】
前記第1検出領域は、所定の第1検出原点を基準点として前記ロボット本体の配置領域及び前記可動部の前記可動領域の両方よりも少なくとも前記第1方向における一方側まで延び、
前記第1検出部は、
前記第1検出原点を出発点として、前記ロボット本体の前記配置領域及び前記可動部の前記可動領域のいずれとも重ならずに前記配置領域及び前記可動領域の両方よりも前記第1方向における前記一方側まで延びる所定の仮想平面、を第1仮想平面としたとき、前記第1検出領域が前記第1仮想平面に含まれるように配置され、
少なくとも前記糸掛けの実行中において、前記第1仮想平面は、
前記第1検出原点を出発点として、前記ロボット本体の前記配置領域及び前記可動部の前記可動領域のいずれとも重ならずに前記配置領域及び前記可動領域の両方よりも前記第2方向における前記一方側まで延びる第1仮想線分と、
前記第1検出原点を出発点として、前記ロボット本体の前記配置領域及び前記可動部の前記可動領域のいずれとも重ならずに前記第1方向に沿って前記第1方向における他方側に延び、前記配置領域及び前記可動領域の両方よりも前記第1方向における前記他方側まで延びる第2仮想線分と、を含む扇形である請求項1~4のいずれかに記載の糸掛ロボット。
【請求項6】
少なくとも前記糸掛けの実行時に、前記第1仮想平面の中心角度は、180°以上である、請求項5に記載の糸掛ロボット。
【請求項7】
前記可動部の前記可動領域の少なくとも一部は、前記ロボット本体よりも前記第1方向における前記他方側に配置され、
前記ロボット本体に取り付けられ、所定の第2検出原点を基準点として前記ロボット本体の前記配置領域及び前記可動部の前記可動領域の両方よりも少なくとも前記第1方向における前記他方側まで延びる所定の第2検出領域の中に位置している物体を検出可能に構成された第2検出部、を備え、
前記第2検出部は、
前記第2検出原点を出発点として、前記ロボット本体の前記配置領域及び前記可動部の前記可動領域のいずれとも重ならずに前記配置領域及び前記可動領域の両方よりも前記第1方向における前記他方側まで延びる所定の仮想平面、を第2仮想平面としたとき、前記第2検出領域が前記第2仮想平面に含まれるように配置されている、請求項5又は6に記載の糸掛ロボット。
【請求項8】
前記第1検出部は、設定により前記第1検出領域の形状及び面積の少なくとも一方を変更可能に構成されている、請求項1~7のいずれかに記載の糸掛ロボット。
【請求項9】
前記可動部は、
走行中の糸を吸引保持可能に構成された吸引部と、
前記吸引部に接続され、前記糸を吸引保持する負圧を生成するための流体を前記吸引部に供給可能且つ前記流体を前記吸引部から排出可能に構成された配管部と、を有し、
前記配管部のうち前記ロボット本体の外側に配置された部分の一部は、前記ロボット本体に固定されている、請求項1~8のいずれかに記載の糸掛ロボット。
【請求項10】
前記可動部は、
走行中の糸を吸引保持可能に構成された吸引部と、
前記吸引部を前記ロボット本体に対して移動させるアーム機構と、
前記吸引部に接続され、前記糸を吸引保持する負圧を生成するための流体を前記吸引部に供給可能且つ前記流体を前記吸引部から排出可能に構成された配管部と、を有し、
前記配管部のうち前記ロボット本体の外側に配置された部分の一部は、前記第1検出部に対して位置が固定され、
前記配管部の前記一部は、前記第1検出部が前記糸掛位置に位置しているときに、前記第1検出部が前記走行位置に位置しているときと比べて、前記第2方向において前記アーム機構の可動領域から遠い、請求項1~9のいずれかに記載の糸掛ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数の糸巻取機への糸掛けを実行可能に構成された糸掛ロボットに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
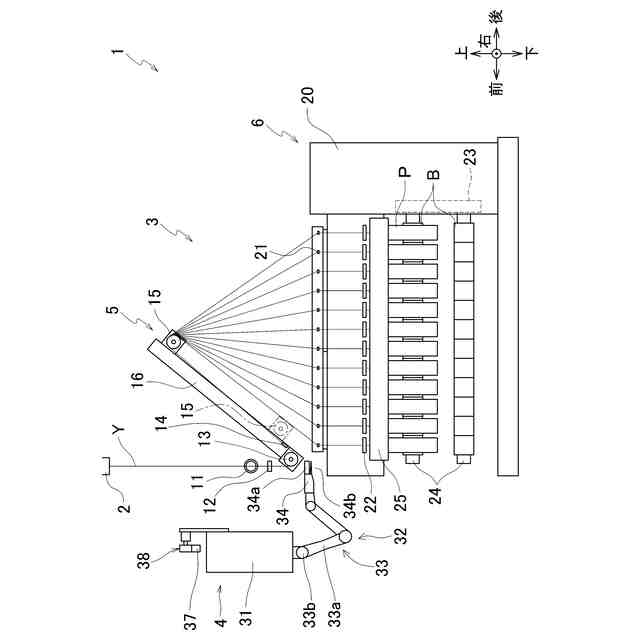
特許文献1には、紡糸装置から紡出される複数の糸をそれぞれ引き取る複数の引取装置(糸巻取機)への糸掛けを実行可能に構成された糸掛ロボットが開示されている。糸掛ロボットは、ロボット本体と、可動部とを備える。ロボット本体は、複数の引取装置が並べて配置された所定方向に沿って走行可能に構成されている。可動部は、ロボット本体に対して動くことにより糸掛けの動作を実行可能に構成されている。
【0003】
また、糸掛ロボットは、障害物を検知可能に構成されたエリアセンサ(検出部)を有する。検出部は、ロボット本体の所定方向における端部に取り付けられている。検出部は、ロボット本体の走行経路上に位置している障害物を検知可能に構成されている。障害物が検知されたときにロボット本体の走行が停止させられることにより、ロボット本体と障害物との衝突が回避される。
【先行技術文献】
【特許文献】
【0004】
特開2017-82381号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
糸掛ロボットのロボット本体は、糸掛けの動作時に走行停止するように制御される。さらなる安全性向上のため、糸掛け時に糸掛ロボットへの人又は物のアクセスを回避することが求められる。より具体的には、糸掛け時には、所定方向と直交する方向(以下、直交方向)において、糸掛ロボットを隔てて糸巻取機と反対側の空間(以下、作業空間)も監視されることが望まれる。
【0006】
ここで、近年、糸掛ロボットの小型化が進められ、直交方向においてロボット本体が薄くなる傾向にある。ロボット本体の薄型化に応じて検出部の直交方向における取付位置を変更すると、検出部が直交方向において作業空間から遠くなる。一方、可動部が動く領域(可動領域)が大きく変更されるわけではない。そうすると、糸掛け時に、検出部による検出領域が可動部の可動領域と重なって誤検知を起こす可能性が高くなり、必要な監視を行えない問題が生じうる。このため、検出部を直交方向において作業空間側へある程度突出させる必要がある。しかし、検出部がこのように突出していると、糸掛ロボットの走行時に、検出部が他の装置等の邪魔になるおそれがある。
【0007】
本発明の目的は、糸掛ロボットによる糸掛け時に広い領域を監視可能とし、且つ、糸掛ロボットの走行時に検出部が他の装置等の邪魔になることを抑制することである。
【課題を解決するための手段】
【0008】
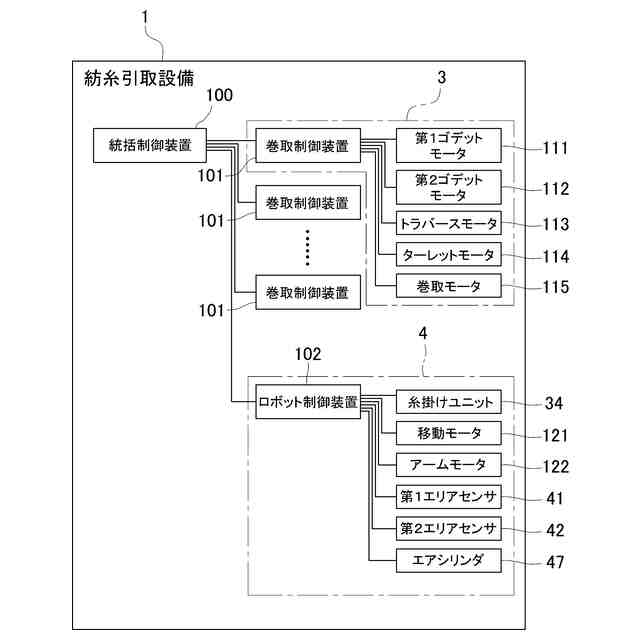
第1の発明の糸掛ロボットは、鉛直方向と交差する第1方向に並べて配置される複数の糸巻取機への糸掛けを実行可能に構成された糸掛ロボットであって、鉛直方向及び前記第1方向の両方と直交する第2方向において前記複数の糸巻取機よりも一方側に配置された状態で、前記第1方向に走行可能に構成されたロボット本体と、前記ロボット本体に取り付けられ、前記ロボット本体に対して所定の可動領域の中で動くことにより前記糸掛けを実行可能に構成された可動部と、前記ロボット本体に取り付けられ、所定の第1検出領域の中に位置している物体を検出可能に構成された第1検出部と、前記第1検出部を、前記可動部による糸掛けが行われているときの糸掛位置と、前記糸掛位置よりも前記第2方向における他方側の走行位置との間で移動させることが可能に構成された移動部と、を備える。
【0009】
本発明では、糸掛ロボットによる糸掛け時には、第1検出部が糸掛位置に位置させられる。これにより、糸掛け時には、第2方向における一方側(すなわち、糸巻取機とは反対側)へ第1検出部を突出させることができる。これにより、第1検出部の検出領域が可動部の可動領域と重なりやすくなることを抑制でき、ロボット本体及び可動部よりも第2方向における一方側の領域を正常に監視しやすくなる。このため、糸掛ロボットによる糸掛け時に広い領域を監視できる。また、第1検出部が走行位置に位置しているとき、第1検出部がロボット本体から第2方向における一方側への突出を抑制できる。したがって、糸掛ロボットの走行時に第1検出部が他の装置等の邪魔になることを抑制できる。
【0010】
第2の発明の糸掛ロボットは、前記第1の発明において、前記第1検出部は、前記糸掛位置に位置しているときに、少なくとも一部が前記第2方向において前記ロボット本体の前記一方側の端よりも前記一方側に突出している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
東レ株式会社
紡糸口金
21日前
日本エステル株式会社
分割型複合繊維
1か月前
TMTマシナリー株式会社
糸掛ロボット
15日前
株式会社ファーマフーズ
繊維製品
21日前
KBセーレン株式会社
熱可塑性酢酸セルロース繊維及びその製造方法
今日
帝人株式会社
メタ型全芳香族ポリアミド繊維及びその製造方法
10日前
個人
繭の煮繭・繰糸する方法及びそれを利用した製糸方法及びそれによる製品
今日
国立研究開発法人農業・食品産業技術総合研究機構
精練方法
1か月前
村田機械株式会社
芯糸供給装置、空気紡績機、芯糸紡績方法及びパッケージ
21日前
KBセーレン株式会社
複合繊維及びそれからなる生地
2日前
村田機械株式会社
ドラフトローラのクリーニング装置用部材及びクリーニング装置
7日前
TMTマシナリー株式会社
紡糸生産設備
今日
特種東海製紙株式会社
長微細アラミド単繊維及びその製造方法並びに長微細アラミド単繊維を含む複合材料及びシート
10日前
国立研究開発法人農業・食品産業技術総合研究機構
繰糸用繭の調製方法
1か月前
ザ・ボーイング・カンパニー
多層ナノ粒子コーティング繊維材料の製造方法及び製造装置
1か月前
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
13日前
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
13日前
他の特許を見る





 特許ウォッチ
特許ウォッチ