TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024158981
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2023074672
出願日
2023-04-28
発明の名称
角度検出装置およびポジショナ
出願人
アズビル株式会社
代理人
個人
主分類
G01D
5/16 20060101AFI20241031BHJP(測定;試験)
要約
【課題】MRセンサの出力のオフセットを補正することなく磁界の角度を検出する。
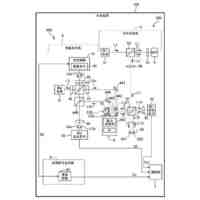
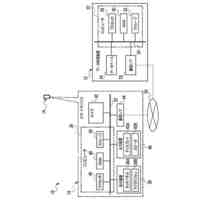
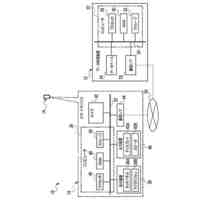
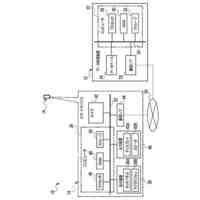
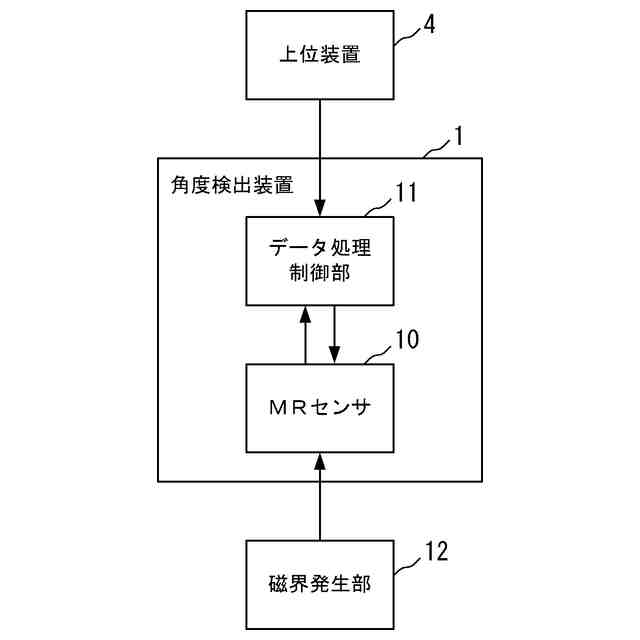
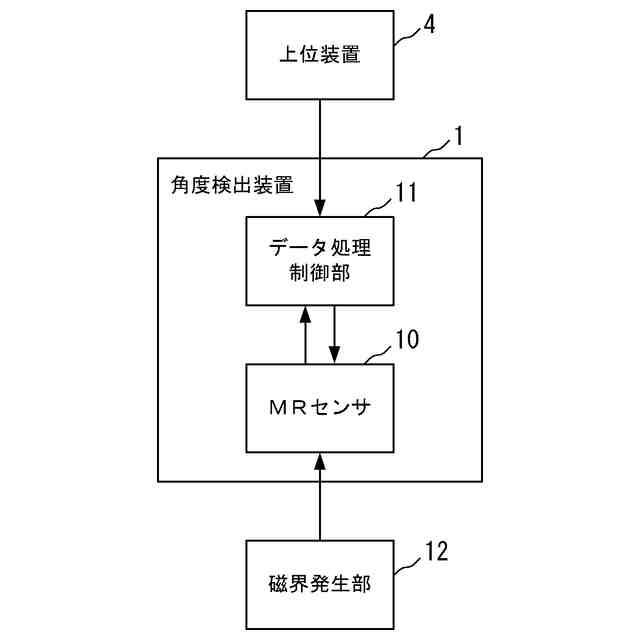
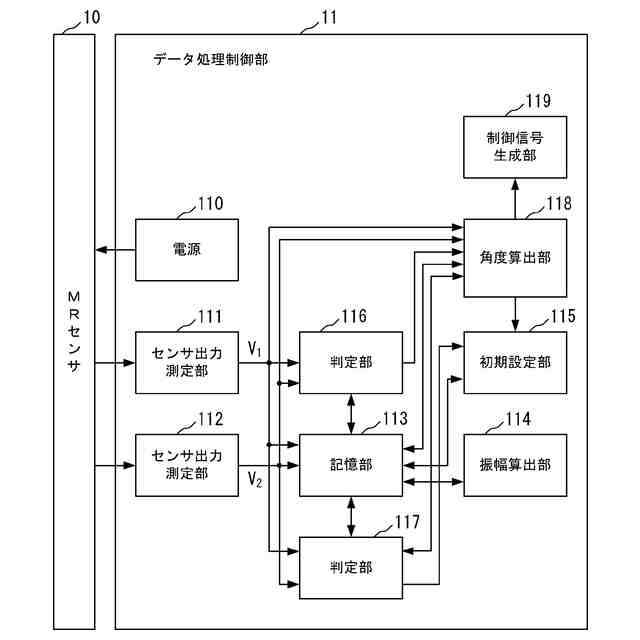
【解決手段】角度検出装置1は、MRセンサ10と、MRセンサ10の出力電圧を測定するセンサ出力測定部111,112と、磁界発生部からMRセンサ10に磁界が印加されるときの出力電圧と磁界の角度とを、磁界発生部の軌道上の少なくとも4点について記憶する記憶部113と、測定された出力電圧と記憶部113に記憶されている情報とに基づいて、磁界の角度を算出する角度算出部118と、角度検出時に測定された出力電圧を既知の振幅で除算した値が所定の幾何学的関係を満たすかどうかを判定して、正確な角度算出が可能なタイミングかどうかを判定する判定部116とを備える。角度算出部118は、算出した値を正確な値として採用するかどうかを、判定部116から得られた結果に基づいて判定する。
【選択図】 図1
特許請求の範囲
【請求項1】
第1乃至第4の磁気抵抗効果素子からなる第1のブリッジ回路と、前記第1のブリッジ回路と出力電圧の位相が異なるように配置された第5乃至第8の磁気抵抗効果素子からなる第2のブリッジ回路とから構成されたMRセンサと、
前記第1、第2のブリッジ回路の出力電圧をそれぞれ測定するように構成されたセンサ出力測定部と、
外部の磁界発生部から前記MRセンサに磁界が印加されるときの前記出力電圧と前記磁界の角度とを、前記磁界発生部の軌道上の少なくとも4点について予め記憶するように構成された記憶部と、
角度検出時に前記センサ出力測定部によって測定された前記出力電圧と前記記憶部に記憶されている情報とに基づいて、前記磁界の角度を算出するように構成された角度算出部と、
角度検出時に前記センサ出力測定部によって測定された前記出力電圧を既知の振幅で除算した値が所定の幾何学的関係を満たすかどうかを判定することにより、前記MRセンサによって正確な角度算出が可能なタイミングかどうかを判定するように構成された第1の判定部とを備え、
前記角度算出部は、算出した値を前記磁界の角度の正確な値として採用するかどうかを、前記第1の判定部から得られた結果に基づいて判定することを特徴とする角度検出装置。
続きを表示(約 5,700 文字)
【請求項2】
請求項1記載の角度検出装置において、
前記角度算出部は、角度検出時に、前記記憶部に記憶されている情報のうち、前記磁界発生部の軌道上の1点を選択し、前記選択した1点における前記出力電圧と前記角度検出時に測定された前記出力電圧とに基づいて、前記角度検出時の前記磁界発生部の位置と前記選択した1点との中間点に前記磁界発生部が位置する場合の前記磁界の角度を算出し、この算出した角度と前記選択した1点における前記磁界の角度とに基づいて、前記角度検出時に前記磁界発生部から前記MRセンサに印加される磁界の角度を算出することを特徴とする角度検出装置。
【請求項3】
請求項1記載の角度検出装置において、
角度検出時に前記磁界の角度変化における前記出力電圧の平均変化率が所定の条件を満たすかどうかを判定することにより、前記MRセンサによって正確な角度算出が可能なタイミングかどうかを判定するように構成された第2の判定部をさらに備え、
前記角度算出部は、算出した値を前記磁界の角度の正確な値として採用するかどうかを、前記第1の判定部から得られた結果に加えて、前記第2の判定部から得られた結果に基づいて判定することを特徴とする角度検出装置。
【請求項4】
請求項3記載の角度検出装置において、
初期設定時に前記記憶部に記憶する情報を設定するように構成された初期設定部をさらに備え、
前記角度算出部は、初期設定時に、前記磁界発生部の軌道上の隣接する2点においてそれぞれ測定された前記出力電圧に基づいて、前記隣接する2点の中間点に前記磁界発生部が位置する場合の前記磁界の角度を算出し、
前記第2の判定部は、初期設定時に、前記磁界発生部が前記軌道上の連続する3点を移動したときに第1の点と第2の点との中間点における前記磁界の角度の値と、前記第2の点と第3の点との中間点における前記磁界の角度の値とを前記角度算出部から取得し、前記第1、第2の点においてそれぞれ測定された前記出力電圧の平均電圧を前記第1の点と前記第2の点との中間点に前記磁界発生部が位置する場合の出力電圧として算出する共に、前記第2、第3の点においてそれぞれ測定された前記出力電圧の平均電圧を前記第2の点と前記第3の点との中間点に前記磁界発生部が位置する場合の出力電圧として算出し、算出した出力電圧と前記角度算出部から取得した前記磁界の角度とに基づいて、前記磁界の角度変化における前記出力電圧の平均変化率が所定の条件を満たすかどうかを判定することにより、前記MRセンサによって正確な角度算出が可能なタイミングかどうかを判定し、
前記初期設定部は、前記第2の判定部から前記MRセンサによって正確な角度算出が可能という判定結果が得られたときに、前記第1の点と前記第2の点との中間点に前記磁界発生部が位置する場合の出力電圧と、前記第1の点と前記第2の点との中間点に前記磁界発生部が位置する場合の前記磁界の角度とを、前記第1の点と前記第2の点との中間点についての情報として前記記憶部に格納することを特徴とする角度検出装置。
【請求項5】
請求項1記載の角度検出装置において、
前記MRセンサを複数備え、
前記センサ出力測定部は、前記複数のMRセンサのそれぞれについて前記第1、第2のブリッジ回路の出力電圧を測定し、
前記記憶部は、前記複数のMRセンサのそれぞれについて前記出力電圧と前記磁界の角度の情報を前記磁界発生部の軌道上の少なくとも4点について記憶し、
前記角度算出部は、前記複数のMRセンサのそれぞれについて前記磁界発生部から印加される磁界の角度を算出し、
前記第1の判定部は、角度検出時に前記センサ出力測定部によって測定された前記出力電圧を既知の振幅で除算した値が所定の幾何学的関係を満たすかどうかをMRセンサ毎に判定することにより、正確な角度算出が可能なタイミングかどうかをMRセンサ毎に判定し、
前記角度算出部は、角度検出時に前記複数のMRセンサのそれぞれについて算出した値を前記磁界の角度の正確な値として採用するかどうかを、前記第1の判定部から得られた結果に基づいて判定することを特徴とする角度検出装置。
【請求項6】
請求項3記載の角度検出装置において、
前記MRセンサを複数備え、
前記センサ出力測定部は、前記複数のMRセンサのそれぞれについて前記第1、第2のブリッジ回路の出力電圧を測定し、
前記記憶部は、前記複数のMRセンサのそれぞれについて前記出力電圧と前記磁界の角度の情報を前記磁界発生部の軌道上の少なくとも4点について記憶し、
前記角度算出部は、前記複数のMRセンサのそれぞれについて前記磁界発生部から印加される磁界の角度を算出し、
前記第1の判定部は、角度検出時に前記センサ出力測定部によって測定された前記出力電圧を既知の振幅で除算した値が所定の幾何学的関係を満たすかどうかをMRセンサ毎に判定することにより、正確な角度算出が可能なタイミングかどうかをMRセンサ毎に判定し、
前記第2の判定部は、角度検出時に前記磁界の角度変化における前記出力電圧の平均変化率が所定の条件を満たすかどうかをMRセンサ毎に判定することにより、正確な角度算出が可能なタイミングかどうかをMRセンサ毎に判定し、
前記角度算出部は、角度検出時に前記複数のMRセンサのそれぞれについて算出した値を前記磁界の角度の正確な値として採用するかどうかを、前記第1、第2の判定部から得られた結果に基づいて判定することを特徴とする角度検出装置。
【請求項7】
請求項1記載の角度検出装置において、
前記第1の判定部は、前記記憶部に記憶されている情報のうち3組の情報を選択し、選択した第1の組における前記第1のブリッジ回路の出力電圧をV
1A
、前記第1の組における前記第2のブリッジ回路の出力電圧をV
2A
、選択した第2の組における前記第1のブリッジ回路の出力電圧をV
1B
、前記第2の組における前記第2のブリッジ回路の出力電圧をV
2B
、選択した第3の組における前記第1のブリッジ回路の出力電圧をV
1D
、前記第3の組における前記第2のブリッジ回路の出力電圧をV
2D
、角度検出時に測定された前記第1のブリッジ回路の出力電圧をV
1E
、角度検出時に測定された前記第2のブリッジ回路の出力電圧をV
2E
とし、前記第1のブリッジ回路の出力電圧の既知の振幅をV
m1
、前記第2のブリッジ回路の出力電圧の既知の振幅をV
m2
とし、点(V
1A
/V
m1
,V
2A
/V
m2
)と点(V
1B
/V
m1
,V
2B
/V
m2
)を結ぶ辺の長さをAB、点(V
1B
/V
m1
,V
2B
/V
m2
)と点(V
1D
/V
m1
,V
2D
/V
m2
)を結ぶ辺の長さをBD、点(V
1D
/V
m1
,V
2D
/V
m2
)と点(V
1A
/V
m1
,V
2A
/V
m2
)を結ぶ辺の長さをDA、点(V
1A
/V
m1
,V
2A
/V
m2
)と点(V
1E
/V
m1
,V
2E
/V
m2
)を結ぶ辺の長さをAE、点(V
1E
/V
m1
,V
2E
/V
m2
)と点(V
1D
/V
m1
,V
2D
【請求項8】
請求項4記載の角度検出装置において、
前記第1乃至第8の磁気抵抗効果素子は、AMR素子であり、
前記第2の判定部は、前記第1の点と前記第2の点との中間点に前記磁界発生部が位置する場合の前記第1のブリッジ回路の出力電圧をaveV
1α1α2
、前記第1の点と前記第2の点との中間点に前記磁界発生部が位置する場合の前記第1のブリッジ回路の出力電圧をaveV
2α1α2
、前記第2の点と前記第3の点との中間点に前記磁界発生部が位置する場合の前記第1のブリッジ回路の出力電圧をaveV
1α2α3
、前記第1の点と前記第2の点との中間点に前記磁界発生部が位置する場合の前記第2のブリッジ回路の出力電圧をaveV
2α2α3
とし、前記第1の点と前記第2の点との中間点における前記磁界の角度を(α2+α1)/2、前記第2の点と前記第3の点との中間点における前記磁界の角度を(α3+α2)/2、前記第1のブリッジ回路の出力電圧の既知の振幅をV
m1
、前記第2のブリッジ回路の出力電圧の既知の振幅をV
m2
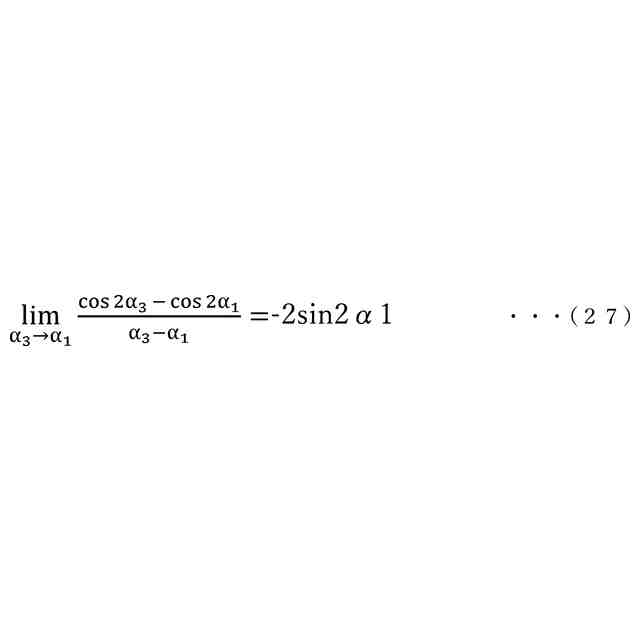
としたとき、磁界の角度変化における前記第1のブリッジ回路の出力電圧の平均変化率(cos2α3-cos2α1)/(α3-α1)を(aveV
1α2α3
-aveV
1α1α2
)/{(α2+α3)/2-(α1+α2)/2}/V
m1
=(cos2α3-cos2α1)/(α3-α1)により算出し、磁界の角度変化における前記第2のブリッジ回路の出力電圧の平均変化率(sin2α3-sin2α1)/(α3-α1)を(aveV
2α2α3
-aveV
2α1α2
)/{(α2+α3)-(α1+α2)}/V
m2
=(sin2α3-sin2α1)/(α3-α1)により算出し、(1/4)×{(cos2α3-cos2α1)/(α3-α1)}
2
+{(sin2α3-sin2α1)/(α3-α1)}
2
≒1が成立するときに、前記MRセンサによって正確な角度算出が可能なタイミングと判定することを特徴とする角度検出装置。
【請求項9】
請求項4記載の角度検出装置において、
前記第1乃至第8の磁気抵抗効果素子は、GMR素子またはTMR素子であり、
前記第2の判定部は、前記第1の点と前記第2の点との中間点に前記磁界発生部が位置する場合の前記第1のブリッジ回路の出力電圧をaveV
1α1α2
、前記第1の点と前記第2の点との中間点に前記磁界発生部が位置する場合の前記第1のブリッジ回路の出力電圧をaveV
2α1α2
、前記第2の点と前記第3の点との中間点に前記磁界発生部が位置する場合の前記第1のブリッジ回路の出力電圧をaveV
1α2α3
、前記第1の点と前記第2の点との中間点に前記磁界発生部が位置する場合の前記第2のブリッジ回路の出力電圧をaveV
2α2α3
とし、前記第1の点と前記第2の点との中間点における前記磁界の角度を(α2+α1)/2、前記第2の点と前記第3の点との中間点における前記磁界の角度を(α3+α2)/2、前記第1のブリッジ回路の出力電圧の既知の振幅をV
m1
、前記第2のブリッジ回路の出力電圧の既知の振幅をV
m2
としたとき、磁界の角度変化における前記第1のブリッジ回路の出力電圧の平均変化率(cosα3-cosα1)/(α3-α1)を(aveV
1α2α3
-aveV
1α1α2
)/{(α2+α3)/2-(α1+α2)/2}/V
m1
=(cosα3-cosα1)/(α3-α1)により算出し、磁界の角度変化における前記第2のブリッジ回路の出力電圧の平均変化率(sinα3-sinα1)/(α3-α1)を(aveV
2α2α3
-aveV
2α1α2
)/{(α2+α3)-(α1+α2)}/V
m2
=(sinα3-sinα1)/(α3-α1)により算出し、{(cosα3-cosα1)/(α3-α1)}
2
+{(sinα3-sinα1)/(α3-α1)}
2
≒1が成立するときに、前記MRセンサによって正確な角度算出が可能なタイミングと判定することを特徴とする角度検出装置。
【請求項10】
請求項1または3記載の角度検出装置と、
バルブ制御運転時に、前記角度算出部によって正確な値として採用された磁界の角度に基づいてバルブの開度実測値を求めるように構成された開度実測値生成部と、
前記バルブ制御運転時に、前記バルブの開度設定値と前記開度実測値とに基づいて前記バルブの開度を制御するための制御信号を生成するように構成された制御信号生成部とを備え、
前記MRセンサは、前記バルブの開閉によって移動する前記磁界発生部から印加される磁界の角度を検出するように配置されることを特徴とするポジショナ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、磁気抵抗効果素子を用いた角度検出装置と、角度検出装置を用いたポジショナに関するものである。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来より、角度センサとして、回転体に取り付けられた磁石による磁界の回転角度を測定するセンサが知られている。角度測定には、磁気抵抗効果(MR:Magneto Resistance effect)素子などを用いたセンサ回路が使用される(特許文献1~4参照)。
【0003】
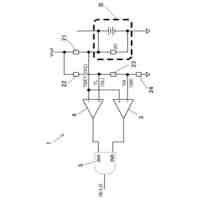
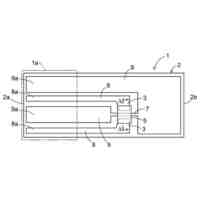
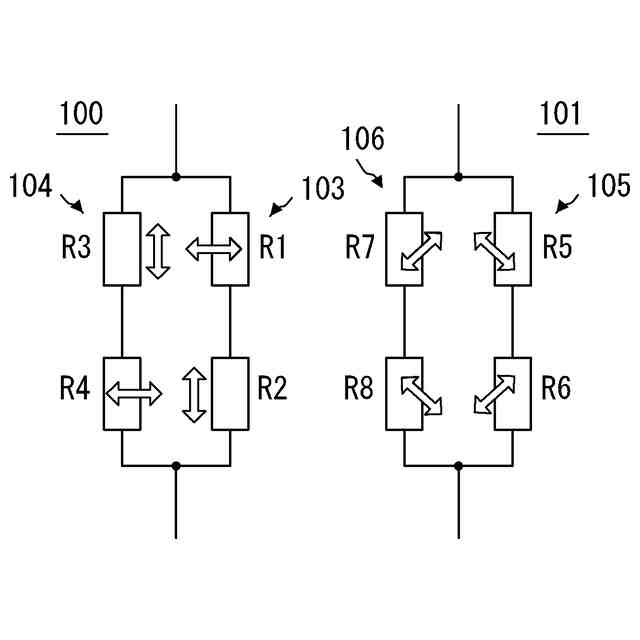
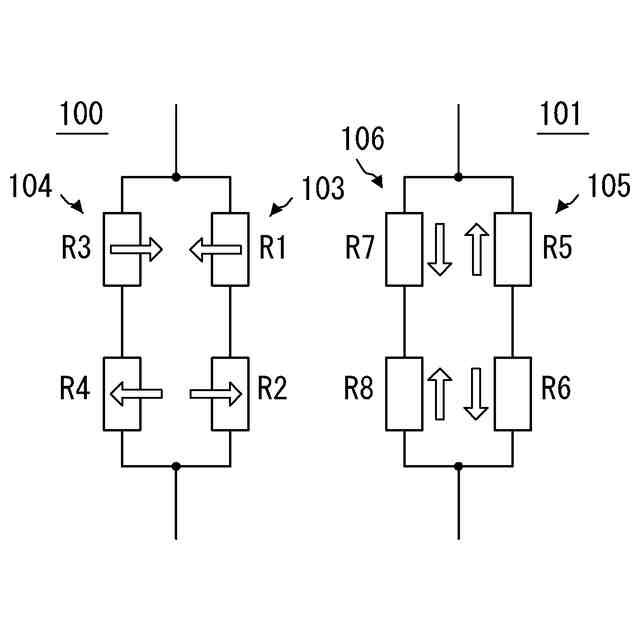
図35は従来のMRセンサの構成を示すブロック図である。MRセンサ10は、磁場のベクトル変化によって電気抵抗が変化するMR素子で構成された2つのブリッジ回路100,101から構成される。ブリッジ回路100は、MR素子R1とMR素子R2とを直列に接続した直列回路103と、MR素子R3とMR素子R4とを直列に接続した直列回路104とを並列に接続したものである。同様に、ブリッジ回路101は、MR素子R5とMR素子R6とを直列に接続した直列回路105と、MR素子R7とMR素子R8とを直列に接続した直列回路106とを並列に接続したものである。
【0004】
図示しない回転体と共に磁石がブリッジ回路100,101の周囲を回転すると、ブリッジ回路100,101に作用する磁界の方向が変化してブリッジ回路100,101のMR素子R1~R8の抵抗値が変化する。図36に示すようにMRセンサ10のブリッジ回路100,101に対して磁界を角度α=0°~360°の向きで印加した場合、ブリッジ回路100の出力電圧V
1
を余弦(cos)波で表せるとすると、ブリッジ回路101の出力電圧V
2
を正弦(sin)波で表すことができる。
【0005】
MR素子R1~R8として異方性磁気抵抗効果(AMR:AnisotropicMagneto Resistance effect)素子を用いる場合、ブリッジ回路100,101の出力電圧V
1
,V
2
の周期が180°であるため、以下の式が得られる。
V
1
=V
m1
cos2α+V
1
off ・・・(1)
V
2
=V
m2
sin2α+V
2
off ・・・(2)
【0006】
V
m1
は出力電圧V
1
の最大振幅、V
m2
は出力電圧V
2
の最大振幅、V
1
offは出力電圧V
1
のオフセット、V
2
offは出力電圧V
2
のオフセットである。オフセットV
1
off,V
2
offと振幅V
m1
,V
m2
とを事前に求めておけば、出力電圧V
1
,V
2
を測定することにより、磁界の角度αを算出することができる。また、MR素子R1~R8として巨大磁気抵抗効果(GMR:Giant Magneto Resistance effect)素子またはトンネル磁気抵抗効果(TMR:Tunnel Magneto resistance effect)素子を用いる場合、出力電圧V
1
,V
2
の周期が360°であるため、式(1)、式(2)の2αがαとなる。
【0007】
ただし、式(1)、式(2)は正確な角度検出をするうえで十分な磁界がかけられている状態の場合で、十分な磁界がかけられていない場合には、ブリッジ回路100,101の出力電圧V
1
,V
2
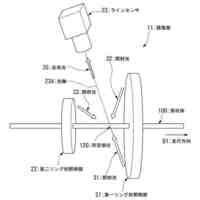
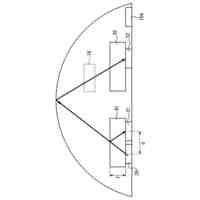
の関係性が不明瞭となる(必ずしも正弦波,余弦波の関係とはならない)。例えばMRセンサ10と磁石130とが図37のような位置関係にある場合、MRセンサ10が十分な磁界がかけられている状態となり、磁界の角度αを検出することが可能である。一方、MRセンサ10と磁石130とが図38のような位置関係にある場合、MRセンサ10に印加される磁界の強度が不十分となり、角度αを検出することが不可能となる。図37、図38では、実線131の内側がMRセンサ10の角度検出可能範囲を示している。
【0008】
図39は、MR素子R1~R8としてAMR素子を用いた場合の磁界の角度αとブリッジ回路100,101の出力電圧V
1
,V
2
との関係を示す図である。図39の500は角度検出にとって十分な強度の磁界がMRセンサに印加されている範囲を示し、501は磁界の強度が不十分な範囲を示している。
【0009】
以上のように、従来の技術では、MRセンサの検知範囲を超えるような磁石の動きを検知する際、検知範囲外のときは出力電圧V
1
,V
2
の関係が不明瞭となるため、どのタイミングからセンシングすれば角度を正確に検知できるかタイミングが分からないという課題があった。また、MRセンサの出力には角度誤差要因となるオフセットがあるため、正確な角度を算出するためにはオフセットを補正する必要があるという課題があった。また、複数のMRセンサがある場合に、どのセンサを選択すれば角度を正確に検知できるか分からないという課題があった。
【先行技術文献】
【特許文献】
【0010】
米国特許第10571305号明細書
欧州特許第2672285号明細書
特開2021-148447号公報
米国特許出願公開第2020/0191546号明細書
【発明の概要】
【発明が解決しようとする課題】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
位置検出装置
2日前
東ソー株式会社
自動分析装置及び方法
2日前
株式会社ヨコオ
シートコンタクタ
2日前
セイコーエプソン株式会社
干渉計
2日前
JRCモビリティ株式会社
充電用温度判定回路
2日前
内山工業株式会社
分析装置用部材
1日前
株式会社SUBARU
蓄電池の状態センサ装置
2日前
国立大学法人 東京大学
粘性の測定装置及び方法
1日前
株式会社アイシン
乗員検知装置
2日前
株式会社メック
欠陥検査装置及び欠陥検査方法
1日前
パイオニア株式会社
監視装置、監視方法および監視プログラム
2日前
タカハタプレシジョン株式会社
水道メータ
1日前
国立大学法人山口大学
地下水流向流速計
1日前
株式会社プロテリアル
圧力センサ付きケーブル
2日前
旭化成エレクトロニクス株式会社
ガスセンサ
1日前
株式会社栗本鐵工所
管継手の屈曲角測定方法
2日前
ソフトバンクグループ株式会社
システム
2日前
ソフトバンクグループ株式会社
システム
2日前
ソフトバンクグループ株式会社
システム
2日前
ソフトバンクグループ株式会社
システム
2日前
ソフトバンクグループ株式会社
システム
2日前
ソフトバンクグループ株式会社
システム
1日前
ソフトバンクグループ株式会社
システム
1日前
株式会社SOKEN
生体検出装置
2日前
ソフトバンクグループ株式会社
システム
5日前
ザ・ボーイング・カンパニー
検査システムおよび方法
5日前
ソフトバンクグループ株式会社
システム
2日前
ソフトバンクグループ株式会社
システム
1日前
ソフトバンクグループ株式会社
システム
1日前
ソフトバンクグループ株式会社
システム
1日前
ソフトバンクグループ株式会社
システム
2日前
ソフトバンクグループ株式会社
システム
1日前
株式会社オプトラン
半導体式のガスセンサ
1日前
ソフトバンクグループ株式会社
システム
1日前
ソフトバンクグループ株式会社
システム
1日前
ソフトバンクグループ株式会社
システム
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ