TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024121221
公報種別
公開特許公報(A)
公開日
2024-09-06
出願番号
2023028192
出願日
2023-02-27
発明の名称
アキシャルギャップモータの製造方法
出願人
株式会社デンソー
代理人
個人
,
個人
主分類
H02K
15/02 20060101AFI20240830BHJP(電力の発電,変換,配電)
要約
【課題】中央部材に大きな応力が掛かることを抑制可能としたアキシャルギャップモータの製造方法を提供すること。
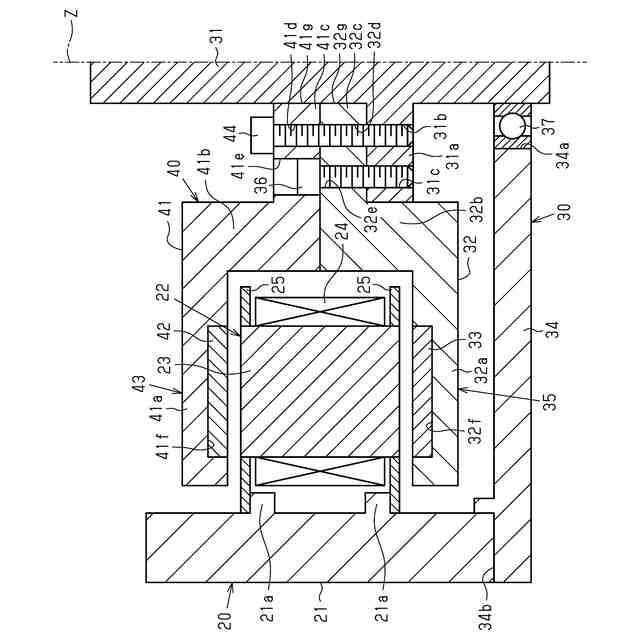
【解決手段】回転軸(31)の軸線方向における中央に配置されるステータ本体部(22)と、ステータ本体部に対して軸線方向における第1方向に対向するように配置される第1ロータ本体部(35)と、ステータ本体部に対して第1方向とは反対方向である第2方向に対向するように配置される第2ロータ本体部(43)とを備えたアキシャルギャップモータ(10)の製造方法は、第1ロータ本体部と第2ロータ本体部とが、ステータ本体部に対して、同時に近づくように、ステータ本体部を有する中央部材(20)と、第1ロータ本体部を有する第1部材(30)と、第2ロータ本体部を有する第2部材(40)とを相対移動させる組み付け工程を備える。
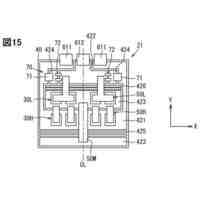
【選択図】図2
特許請求の範囲
【請求項1】
回転軸(31)の軸線方向における中央に配置されるステータ本体部(22)と、前記ステータ本体部に対して前記軸線方向における第1方向に対向するように配置される第1ロータ本体部(35)と、前記ステータ本体部に対して前記第1方向とは反対方向である第2方向に対向するように配置される第2ロータ本体部(43)と、を備えた、アキシャルギャップモータ(10)の製造方法であって、
前記第1ロータ本体部と前記第2ロータ本体部とが、前記ステータ本体部に対して、同時に近づくように、または交互に徐々に近づくように、前記ステータ本体部を有する中央部材(20)と、前記第1ロータ本体部を有する第1部材(30)と、前記第2ロータ本体部を有する第2部材(40)とを相対移動させる組み付け工程を備える、
アキシャルギャップモータの製造方法。
続きを表示(約 1,500 文字)
【請求項2】
前記組み付け工程では、前記中央部材を移動不能に固定した状態で、前記第1部材と前記第2部材とを同時に同じ速度で移動させる、
請求項1に記載のアキシャルギャップモータの製造方法。
【請求項3】
前記組み付け工程では、前記第1部材を移動不能に固定した状態で、前記中央部材と前記第2部材とを同時に移動させるとともに、前記第2部材を前記中央部材の速度の2倍の速度で移動させる、
請求項1に記載のアキシャルギャップモータの製造方法。
【請求項4】
前記中央部材は、前記ステータ本体部の外周が固定される筒状のハウジング(21)を有する、
請求項1に記載のアキシャルギャップモータの製造方法。
【請求項5】
前記第1ロータ本体部は、周方向に複数の第1マグネット(33)と前記複数の第1マグネットが固定される第1ロータコア部(32a)とを有し、
前記第1部材は、前記第1ロータコア部と第1中央孔(32g)とを有する第1コア部材(32)と、前記第1中央孔を貫通しつつ前記第1コア部材に固定される前記回転軸と、を有し、
前記第2ロータ本体部は、周方向に複数の第2マグネット(42)と前記複数の第2マグネットが固定される第2ロータコア部(41a)とを有し、
前記第2部材は、前記第2ロータコア部と第2中央孔(41g)とを有する第2コア部材(41)を有し、
前記組み付け工程では、前記回転軸を、非圧入状態で前記第2中央孔に挿通させ、
前記組み付け工程の後、前記第2コア部材を前記回転軸に対して固定するコア固定工程を備える、
請求項1に記載のアキシャルギャップモータの製造方法。
【請求項6】
前記回転軸は、径方向外側に延出するフランジ部(31a)を有し、
前記フランジ部は、フランジ固定孔(31b)とフランジ仮固定孔(31c)とを有し、
前記第1コア部材は、第1固定孔(32d)と第1仮固定孔(32e)とを有し、
前記第2コア部材は、第2固定孔(41d)と抜き孔(41e)とを有し、
前記組み付け工程では、前記第1コア部材と前記回転軸とは、前記第1仮固定孔と前記フランジ仮固定孔とを貫通する第1ボルト(36)によって固定されており、
前記コア固定工程では、前記第2固定孔と前記第1固定孔と前記フランジ固定孔とを貫通する第2ボルト(44)によって、前記第2コア部材と前記第1コア部材と前記回転軸とを固定させ、
前記コア固定工程の後、前記抜き孔を介して前記第1ボルトを前記第1仮固定孔と前記フランジ仮固定孔とから抜き取る抜き工程を備える、
請求項5に記載のアキシャルギャップモータの製造方法。
【請求項7】
回転軸(77)の軸線方向における中央に配置されるロータ本体部(71)と、前記ロータ本体部に対して前記軸線方向における第1方向に対向するように配置される第1ステータ本体部(73)と、前記ロータ本体部に対して前記第1方向とは反対方向である第2方向に対向するように配置される第2ステータ本体部(75)と、を備えた、アキシャルギャップモータ(70)の製造方法であって、
前記第1ステータ本体部と前記第2ステータ本体部とが、前記ロータ本体部に対して、同時に近づくように、または交互に徐々に近づくように、前記ロータ本体部を有する中央部材(72)と、前記第1ステータ本体部を有する第1部材(74)と、前記第2ステータ本体部を有する第2部材(75)とを相対移動させる組み付け工程を備える、
アキシャルギャップモータの製造方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、アキシャルギャップモータの製造方法に関するものである。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来から、モータとしては、ステータとロータとが回転軸の軸線方向に対向して配置されるアキシャルギャップモータがある。そして、アキシャルギャップモータとしては、軸線方向における中央に配置されるステータ本体部と、ステータ本体部を軸線方向に挟むように配置される第1ロータ本体部と第2ロータ本体部とを備えたものがある(例えば、特許文献1参照)。このようなアキシャルギャップモータの製造方法としては、例えば、まずステータ本体部の外周に筒状のハウジングが固定されることで中央部材が製造される。そして、中央部材のハウジングを移動させることで、第1ロータ本体部に対して、ステータ本体部が上方から近づけられる。そして、さらに、ステータ本体部に対して、第2ロータ本体部が上方から近づけられる。このようにして、第1ロータ本体部と第2ロータ本体部とが、ステータ本体部を挟むように配置される。
【先行技術文献】
【特許文献】
【0003】
特許第6365516号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のようなアキシャルギャップモータの製造方法では、第1ロータ本体部に対してステータ本体部が上方から近づけられた際に、ステータ本体部に第1ロータ本体部に近づく方向の大きな磁気吸引力が働くことになる。これにより、例えば、ステータ本体部を有する中央部材であって、例えばステータ本体部とハウジングとの固定部分に大きな応力が掛かることがある。このことは、例えば、ステータ本体部とハウジングとの固定部分を破損させる原因となる。よって、ステータ本体部とハウジングとの固定部分に強固な固定構造が必要となり、ひいては中央部材の重量化等を生じさせる原因となる。
【0005】
本開示は、上記問題点を解決するためになされたものであって、その目的は、中央部材に大きな応力が掛かることを抑制可能としたアキシャルギャップモータの製造方法を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するアキシャルギャップモータ(10)の製造方法は、回転軸(31)の軸線方向における中央に配置されるステータ本体部(22)と、前記ステータ本体部に対して前記軸線方向における第1方向に対向するように配置される第1ロータ本体部(35)と、前記ステータ本体部に対して前記第1方向とは反対方向である第2方向に対向するように配置される第2ロータ本体部(43)と、を備えた、アキシャルギャップモータの製造方法であって、前記第1ロータ本体部と前記第2ロータ本体部とが、前記ステータ本体部に対して、同時に近づくように、または交互に徐々に近づくように、前記ステータ本体部を有する中央部材(20)と、前記第1ロータ本体部を有する第1部材(30)と、前記第2ロータ本体部を有する第2部材(40)とを相対移動させる組み付け工程を備える。
【0007】
同方法によれば、組み付け工程では、中央部材と第1部材と第2部材とが相対移動されることにより、第1ロータ本体部と第2ロータ本体部とが、ステータ本体部に対して、同時に近づく、または交互に徐々に近づく。よって、例えば、ステータ本体部の近傍位置に第1ロータ本体部が配置される際には、第2ロータ本体部もステータ本体部の近傍位置に配置されることになる。よって、ステータ本体部には、第1ロータ本体部に近づく方向の磁気吸引力と第2ロータ本体部に近づく方向の磁気吸引力とが共に働くことになる。よって、例えば、第1方向にのみステータ本体部に大きな磁気吸引力が働いてしまうことが防止される。これにより、例えば、ステータ本体部を有する中央部材に大きな応力が掛かることを抑制できる。
【図面の簡単な説明】
【0008】
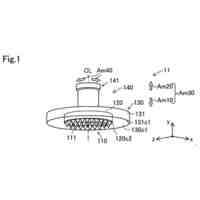
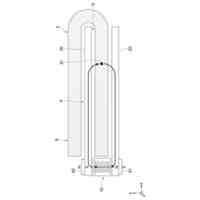
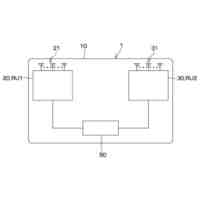
一実施形態におけるアキシャルギャップモータの模式断面図。
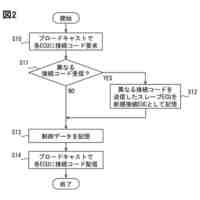
一実施形態におけるアキシャルギャップモータの製造方法を説明するための模式断面図。
一実施形態におけるアキシャルギャップモータの製造方法を説明するための模式断面図。
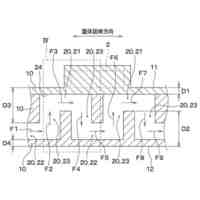
別例におけるアキシャルギャップモータの製造方法を説明するための模式断面図。
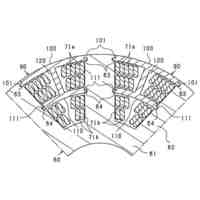
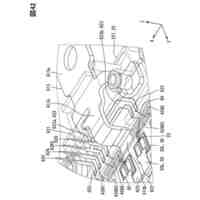
別例におけるアキシャルギャップモータの一部分解斜視図。
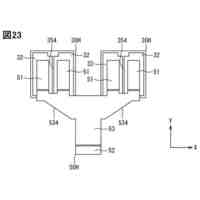
別例におけるアキシャルギャップモータの製造方法を説明するための模式側面図。
【発明を実施するための形態】
【0009】
以下、アキシャルギャップモータの製造方法の一実施形態について図面を参照して説明する。なお、図面では、説明の便宜上、構成の一部を誇張又は簡略化して示す場合がある。また、各部分の寸法比率についても、実際と異なる場合がある。
【0010】
(アキシャルギャップモータ10の構成)
図1及び図2に示すように、アキシャルギャップモータ10は、中央部材20、第1部材30、及び第2部材40等が組み付けられてなる。なお、図1及び図2では、アキシャルギャップモータ10の中心軸線Zを境にしてアキシャルギャップモータ10の片側の断面のみを模式的に図示している。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
測距装置
11日前
株式会社デンソー
生体電極
1か月前
株式会社デンソー
演算装置
11日前
株式会社デンソー
整流回路
1か月前
株式会社デンソー
回転電機
11日前
株式会社デンソー
診断装置
11日前
株式会社デンソー
回転電機
20日前
株式会社デンソー
光学部材
13日前
株式会社デンソー
熱交換器
4日前
株式会社デンソー
検出装置
21日前
株式会社デンソー
駆動回路
8日前
株式会社デンソー
表示装置
19日前
株式会社デンソー
光干渉計
19日前
株式会社デンソー
検出装置
4日前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
レーダ装置
1か月前
株式会社デンソー
レーダ装置
11日前
株式会社デンソー
半導体装置
8日前
株式会社デンソー
半導体装置
8日前
株式会社デンソー
レーダ装置
11日前
株式会社デンソー
半導体装置
11日前
株式会社デンソー
電磁継電器
1か月前
株式会社デンソー
送受信装置
20日前
株式会社デンソー
半導体装置
8日前
株式会社デンソー
半導体装置
11日前
株式会社デンソー
半導体装置
8日前
株式会社デンソー
半導体装置
8日前
株式会社デンソー
半導体装置
8日前
株式会社デンソー
半導体装置
8日前
株式会社デンソー
レーダ装置
11日前
株式会社デンソー
電力供給装置
11日前
株式会社デンソー
電力供給装置
11日前
株式会社デンソー
電子制御装置
4日前
株式会社デンソーテン
電源制御装置
5日前
株式会社デンソー
充電計画装置
11日前
株式会社デンソー
演算システム
19日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ