TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024104180
公報種別
公開特許公報(A)
公開日
2024-08-02
出願番号
2023008278
出願日
2023-01-23
発明の名称
回転量推定装置、回転量推定方法、及びモータ制御装置
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
主分類
H02P
7/06 20060101AFI20240726BHJP(電力の発電,変換,配電)
要約
【課題】逆起電圧を用いずに、直流モータに印加される直流電圧が変動してから、直流モータの回転速度が変動後の直流電圧に対応する対応速度に達したとみなし得るまでの期間における、直流モータの回転量を高い精度で推定する。
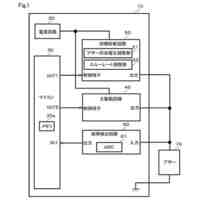
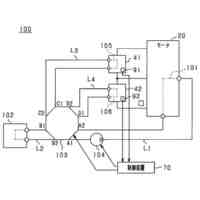
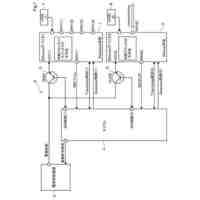
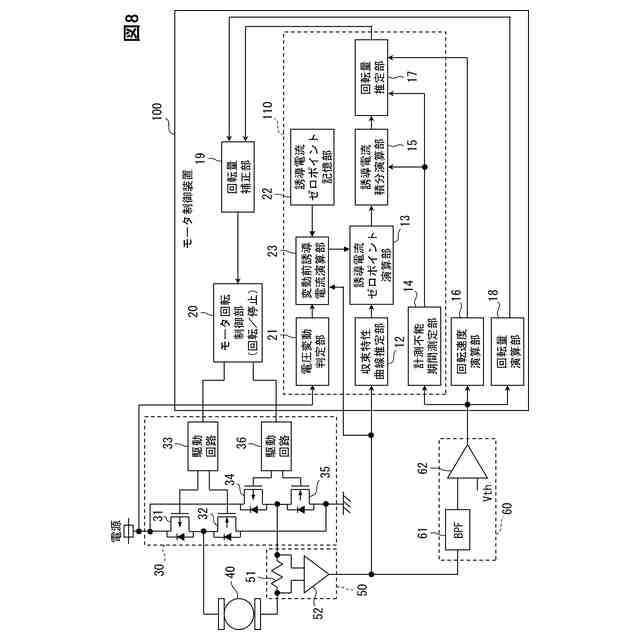
【解決手段】直流モータに印加される直流電圧が変動してから、直流モータの回転速度が変動後の直流電圧に対応する対応速度に達したとみなし得るまでの期間において、モータ電流が対応速度に応じたモータ電流に収束する特性を示す収束特性曲線を推定する収束特性曲線推定部12と、推定されたモータ電流の収束特性曲線に基づいて、直流モータの回転に応じて直流モータに流れる誘導電流を、上記期間に渡って積分した積分値を算出する積分値算出部15と、算出された誘導電流の積分値に基づいて、上記期間における直流モータの回転量を推定する回転量推定部17と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
ブラシ付き直流モータ(40)の回転量を推定する回転量推定装置(11、110)であって、
前記直流モータに印加される直流電圧が変動してから、前記直流モータの回転速度が変動後の前記直流電圧に対応する対応速度に達したとみなし得るまでの期間において、モータ電流が前記対応速度に応じたモータ電流に収束する特性を示す収束特性曲線を、前記直流モータを流れるモータ電流に基づいて推定する収束特性曲線推定部(12)と、
前記収束特性曲線推定部によって推定されたモータ電流の前記収束特性曲線に基づいて、前記直流モータの回転に応じて前記直流モータに流れる誘導電流を、前記期間に渡って積分した積分値を算出する積分値算出部(15)と、
前記積分値算出部によって算出された前記誘導電流の積分値に基づいて、前記期間における前記直流モータの回転量を推定する回転量推定部(17)と、を備える回転量推定装置。
続きを表示(約 1,800 文字)
【請求項2】
前記直流モータのモータ電流に含まれるリップル成分に基づき、前記直流モータの回転に応じたパルス信号を生成するパルス信号生成部(60)を備え、
前記収束特性曲線推定部は、前記パルス信号生成部によって生成されるパルス信号から前記直流モータの回転速度又は回転量が検出可能となったとき、前記直流モータの回転速度が変動後の前記直流電圧に対応する前記対応速度に達したとみなす、請求項1に記載の回転量推定装置。
【請求項3】
前記収束特性曲線推定部は、前記期間において測定された、少なくとも3点のモータ電流の値と、前記少なくとも3点のモータ電流の値が得られた時間とに基づいて、前記収束特性曲線を導出する請求項1又は2に記載の回転量推定装置。
【請求項4】
前記収束特性曲線推定部が導出する前記収束特性曲線は、2次関数曲線である、請求項3に記載の回転量推定装置。
【請求項5】
前記収束特性曲線推定部は、前記モータ電流がピーク値となった以降に、前記少なくとも3点のモータ電流の値と、前記少なくとも3点のモータ電流の値が得られた時間とを取得する請求項3に記載の回転量推定装置。
【請求項6】
前記収束特性曲線推定部が前記収束特性曲線を推定する前記期間は、停止している前記直流モータに対して、前記直流モータを回転させるための直流電圧が印加されてから、前記直流モータの回転速度が前記直流電圧に対応する前記対応速度に達したとみなし得るまでの第1の期間である、請求項1又は2に記載の回転量推定装置。
【請求項7】
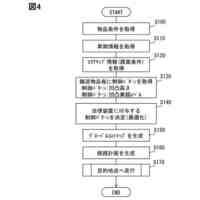
前記回転量推定部は、
前記対応速度と、前記第1の期間との積を基準回転量として算出する基準回転量算出部(S170)と、
前記収束特性曲線から推定される、前記直流モータに前記直流電圧を印加した直後のモータ電流から、前記対応速度に応じたモータ電流を減算することによって算出される、前記直流モータが前記対応速度で回転するときの誘導電流と、前記第1の期間との積を基準積分値として算出する基準積分値算出部(S180)と、を有し、
前記基準回転量に、前記基準積分値に対する前記第1の期間の前記誘導電流の積分値の比を乗じることによって、前記第1の期間における前記直流モータの回転量を算出する請求項6に記載の回転量推定装置。
【請求項8】
前記収束特性曲線推定部が前記収束特性曲線を推定する前記期間は、変動前の前記直流電圧に対応する前記対応速度で回転している前記直流モータに変動後の前記直流電圧が印加されてから、前記直流モータの回転速度が変動後の前記直流電圧に対応する前記対応速度に達したとみなし得るまでの第2の期間である、請求項1又は2に記載の回転量推定装置。
【請求項9】
前記回転量推定部は、
変動後の前記直流電圧に対応する前記対応速度と、前記第2の期間との積を基準回転量として算出する基準回転量算出部(S390)と、
前記収束特性曲線から推定される、前記直流モータに変動後の前記直流電圧を印加した直後のモータ電流と、変動前の前記直流電圧に対応する前記対応速度で回転している前記直流モータに流れる誘導電流との和から、変動後の前記直流電圧に対応する前記対応速度に応じたモータ電流を減算することによって算出される、前記直流モータが変動後の前記直流電圧に対応する前記対応速度で回転するときの誘導電流と、前記第2の期間との積を基準積分値として算出する基準積分値算出部(S400)と、を有し、
前記基準回転量に、前記基準積分値に対する前記第2の期間の前記誘導電流の積分値の比を乗じることによって、前記第2の期間における前記直流モータの回転量を算出する請求項8に記載の回転量推定装置。
【請求項10】
前記直流モータに印加される前記直流電圧の変動を判定する電圧変動判定部(21)を備え、
前記回転量推定部は、前記電圧変動判定部によって前記直流電圧が所定の閾値を超えて変動したと判定されたことを条件として、前記第2の期間における前記直流モータの回転量を算出するための処理を実行する、請求項8に記載の回転量推定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、例えばブラシ付き直流モータの回転を開始する起動時など、ブラシ付き直流モータへ印加される電圧が変動したときに、ブラシ付き直流モータの回転量を高精度に推定することが可能な回転量推定装置及び回転量推定方法、並びに回転量推定装置を備えるモータ制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
例えば特許文献1には、ブラシを有する直流モータに流れる電流、又は該モータの端子間電圧などのモータ駆動波形に基づき、モータの回転情報を検出する装置が開示されている。
【0003】
特許文献1に記載の装置では、検出されたモータ電流の波形から、リップル成分のパルス信号を生成する。このパルス信号に基づいて、モータの回転量が推定される。また、モータ端子間電圧と、検出されたモータ電流とから、逆起電圧が推定される。そして、逆起電圧に対して、上記パルス信号のパルス周期ごとに積分演算を行い、モータの回転量を示す積分値を得る。この積分値に基づいて、推定されたモータの回転量が補正される。
【先行技術文献】
【特許文献】
【0004】
特開2005-323488号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の装置では、モータの端子間電圧Vmとモータに流れるモータ電流iとに基づき、下記の数式1に従って逆起電圧Vgを求めている。なお、数式1において、Lはモータの内部インダクタンス、rはモータの内部抵抗を示す。
(式1)Vg=Vm-r・i-L(di/dt)
【0006】
しかしながら、モータの内部抵抗rなどは、モータの温度によって変化する。従って、モータの温度変化が生じた場合、逆起電圧Vgを正しく算出することが困難になる。
【0007】
また、特許文献1に記載の装置では、逆起電力の積分が、パルス信号のパルス周期ごとに繰り返される。しかし、モータの回転開始後などモータの回転速度が低い場合、モータ電流のリップル成分も小さくなるため、パルス信号のパルス周期を正確に得ることも困難になる。このため、逆起電力の積分を正しく行い得ない可能性がある。
【0008】
これらの理由から、モータの回転開始時などにおいて、逆起電力を用いて、モータの正確な回転量を得ることは非常に困難である。
【0009】
本開示は、上述した点に鑑みてなされたものであり、逆起電圧を用いずに、直流モータの回転を開始する起動時など、直流モータに印加される直流電圧が変動してから、直流モータの回転速度が変動後の直流電圧に対応する対応速度に達したとみなし得るまでの期間における、直流モータの回転量を高い精度で推定することが可能な回転量推定装置及び回転量推定方法、並びに当該回転量推定装置を備えるモータ制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本開示による、ブラシ付き直流モータ(40)の回転量を推定する回転量推定装置(11)は、
直流モータに印加される直流電圧が変動してから、直流モータの回転速度が変動後の直流電圧に対応する対応速度に達したとみなし得るまでの期間において、モータ電流が対応速度に応じたモータ電流に収束する特性を示す収束特性曲線を、直流モータを流れるモータ電流に基づいて推定する収束特性曲線推定部(12)と、
収束特性曲線推定部によって推定されたモータ電流の収束特性曲線に基づいて、直流モータの回転に応じて直流モータに流れる誘導電流を、上記期間に渡って積分した積分値を算出する積分値算出部(15)と、
積分値算出部によって算出された誘導電流の積分値に基づいて、上記期間における直流モータの回転量を推定する回転量推定部(17)と、を備えることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
モータ
6日前
株式会社デンソー
ロータコア
4日前
株式会社デンソー
電子制御装置
6日前
株式会社デンソー
電子制御装置
5日前
株式会社デンソーエレクトロニクス
配電システム
5日前
株式会社デンソー
アクセル装置
今日
株式会社デンソー
電子制御装置
今日
株式会社デンソーウェーブ
三次元計測装置
4日前
株式会社デンソー
アンテナデバイス
5日前
株式会社デンソー
光学センサ、製造方法
6日前
株式会社デンソー
半導体装置の製造方法
3日前
株式会社デンソーウェーブ
無線タグ通信システム
3日前
株式会社デンソーウェーブ
RFタグ用のアンテナ
3日前
株式会社デンソー
ブザー駆動回路の診断装置
3日前
株式会社デンソーエレクトロニクス
車両用ヘッドランプ制御装置
5日前
株式会社デンソー
処理装置、方法及びプログラム
今日
株式会社豊田中央研究所
蓄熱体
今日
株式会社デンソートリム
回転電機及び回転電機用ステータ
3日前
株式会社豊田中央研究所
冷却液
今日
株式会社SOKEN
電池昇温装置
今日
株式会社デンソーテン
機械学習装置、方法及びプログラム
4日前
株式会社デンソー
アキシャルギャップモータの製造方法
3日前
株式会社デンソー
炭化珪素半導体装置およびその製造方法
今日
株式会社デンソー
データ格納システム及びデータ格納方法
4日前
株式会社デンソーウェーブ
産業機器用制御システム及びトルク検出装置
4日前
株式会社デンソー
巻線界磁ロータ、巻線界磁ロータの製造方法
3日前
株式会社デンソーウェーブ
産業機器用制御システム及びトルク検出装置
4日前
株式会社デンソー
盗難抑制装置、盗難抑制方法及び盗難抑制プログラム
3日前
株式会社デンソー
通信デバイスのウェイクアップ/スリープ管理システム
3日前
株式会社SOKEN
電池制御装置および電池制御プログラム
5日前
株式会社デンソー
キー制御システム、キー制御方法、キー管理装置、スマートキー
4日前
株式会社デンソー
電子制御装置、異常原因判定方法、及び異常原因判定プログラム
6日前
株式会社デンソー
電気化学触媒、電気化学セル、および、電気化学セルのメンテナンス方法
今日
株式会社デンソー
処理装置及び処理プログラム
6日前
株式会社デンソー
走行制御システム、走行制御装置、自律装置、走行制御方法、走行制御プログラム
4日前
株式会社デンソー
走行制御システム、走行制御装置、自律装置、走行制御方法、走行制御プログラム
4日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ