TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024053752
公報種別
公開特許公報(A)
公開日
2024-04-16
出願番号
2022160147
出願日
2022-10-04
発明の名称
作業機械の自動運転制御システム
出願人
日立建機株式会社
代理人
弁理士法人平木国際特許事務所
主分類
E02F
9/20 20060101AFI20240409BHJP(水工;基礎;土砂の移送)
要約
【課題】連続的にタスクアプリを使用する際でも、全体として不具合なく動作できるような計画生成を可能にする作業機械の自動運転制御システムを提供する。
【解決手段】アクチュエータを動作させるための複数のタスクアプリを実行する場合に、該複数のタスクアプリを実行する順序を設定する順序選択部と、タスクアプリに入力するパラメータを設定するパラメータ設定部と、タスクアプリを実行する順序及びパラメータに基づいて複数のタスクアプリ毎の実行計画を生成する全体計画部と、複数のタスクアプリ毎に実行計画が生成される毎に、該実行計画の内容の少なくとも一部を出力する、共有情報出力部と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
作業機械を駆動するアクチュエータを自動で制御する作業機械の自動運転制御システムであって、
前記アクチュエータを動作させるための複数のタスクアプリを実行する場合に、該複数のタスクアプリを実行する順序を設定する順序選択部と、
前記タスクアプリに入力するパラメータを設定するパラメータ設定部と、
前記タスクアプリを実行する順序及び前記パラメータに基づいて前記複数のタスクアプリ毎の実行計画を生成する全体計画部と、
前記複数のタスクアプリ毎に実行計画が生成される毎に、該実行計画の内容の少なくとも一部を出力する、共有情報出力部と、を備える、
ことを特徴とする作業機械の自動運転制御システム。
続きを表示(約 790 文字)
【請求項2】
請求項1に記載の作業機械の自動運転制御システムであって、
前記共有情報出力部は、該共有情報出力部が出力する情報を、ネットワークを介して接続された共有情報表示装置に出力する、
ことを特徴とする作業機械の自動運転制御システム。
【請求項3】
請求項1に記載の作業機械の自動運転制御システムであって、
前記複数のタスクアプリに対して前記実行計画が生成される毎に、前記共有情報出力部の出力結果を、実行する順序が次に設定された前記タスクアプリである次タスクアプリに入力するパラメータとして設定する情報伝達部をさらに備える、
ことを特徴とする作業機械の自動運転制御システム。
【請求項4】
請求項3に記載の作業機械の自動運転制御システムであって、
前記情報伝達部が前記共有情報出力部の出力結果を前記次タスクアプリに入力するパラメータとして設定する場合に、該出力結果のパラメータ種を、該次タスクアプリに設定されたパラメータ種に変換する入力情報変換部をさらに備える、
ことを特徴とする作業機械の自動運転制御システム。
【請求項5】
請求項4に記載の作業機械の自動運転制御システムであって、
前記共有情報出力部が出力する情報は、前記作業機械の位置情報、動作情報、車体構造情報、及び周辺環境情報のうち少なくとも1つを含む、
ことを特徴とする作業機械の自動運転制御システム。
【請求項6】
請求項1に記載の作業機械の自動運転制御システムであって、
前記全体計画部が計画した前記複数のタスクアプリ毎の実行計画を、前記順序選択部が設定した実行順序に従って実行する全体実行部をさらに備える、
ことを特徴とする作業機械の自動運転制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械を自動運転する作業機械の自動運転制御システムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
作業機械の自動運転システムにおいて、作業目的(以下タスク)毎に車体の動作を事前計画し、そののちに計画に沿って車体のアクチュエータ動作を行う、自動運転建機(以下タスク指令型建機)が提案されている。たとえば特許文献1はショベルの積み込み動作の自動運転制御に関するものである。また、特許文献2及び特許文献3においても、特定のタスクを実行する作業機械においてタスクを自動運転制御する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-33826号公報
特開2021-73401号公報
特開2019-60109号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の技術によれば、ダンプへの積み込み作業において、オペレータが放土位置を入力することで、自動で、旋回から放土動作を計画し、車体が計画に沿った動作をおこなうことができる。
【0005】
しかしながら、このようなタスクの事前計画を行い、計画に沿った動作を実行する作業機械の自動運転制御システムにおいて、連続的にタスクが計画・実行される場合、N+1回目のタスク内容はN回目のタスクの実行結果に依存する場合がある。以下では、簡便化のために、上記の計画および実行を行うシステム上の演算部をまとめてタスクアプリと呼称する。
【0006】
たとえば、特許文献1にある積み込み動作タスクアプリを演算する直前には、バケット内に土を格納する動作(以下掘削タスクと呼称)が必ず存在する。このような掘削タスクを自動化した場合、掘削タスクアプリ終了時の車体姿勢(例えばブーム角度、アーム角度、バケット角度)が積み込み動作タスクアプリ開始計画時の車体姿勢と一致している必要がある。仮に、姿勢が異なる場合、一連の計画を行うことができない、あるいは計画をしても、計画動作が不連続となり、実現する術がない。特許文献2及び特許文献3についても同様である。
【0007】
本発明は上記を鑑みてなされたものであり、タスク毎に車体の動作計画と計画に沿った動作を実行する制御システム「タスクアプリ」を自動で実行するように設計された作業機械の一形態「タスク指令型建機」において、連続的にタスクアプリを使用する際でも、全体として不具合なく動作できるような計画生成を可能にする作業機械の制御システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
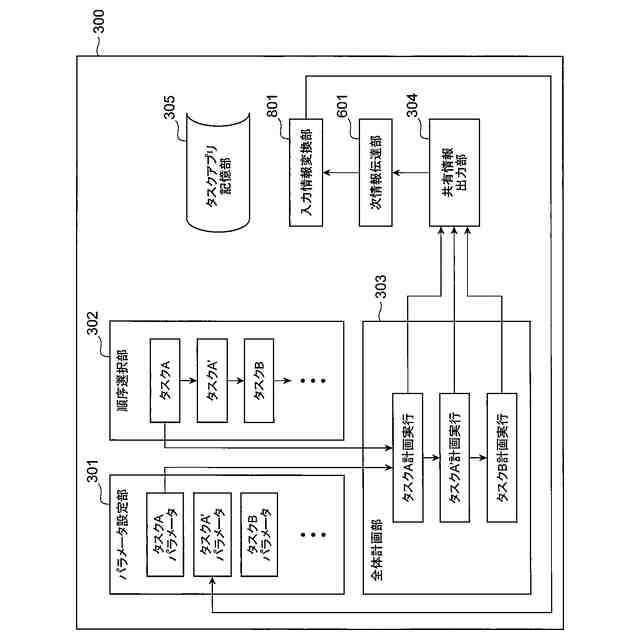
上記課題を解決するために、本発明に係る作業機械の自動運転制御システムは、アクチュエータを動作させるための複数のタスクアプリを実行する場合に、該複数のタスクアプリを実行する順序を設定する順序選択部と、タスクアプリに入力するパラメータを設定するパラメータ設定部と、タスクアプリを実行する順序及びパラメータに基づいて複数のタスクアプリ毎の実行計画を生成する全体計画部と、複数のタスクアプリ毎に実行計画が生成される毎に、該実行計画の内容の少なくとも一部を出力する、共有情報出力部と、を備える。
【発明の効果】
【0009】
本発明によれば、連続的にタスクアプリを使用する際でも、全体として不具合なく動作できるような計画生成が可能になる。
上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0010】
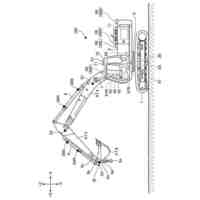
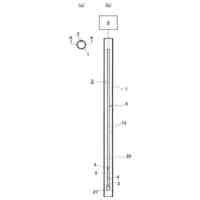
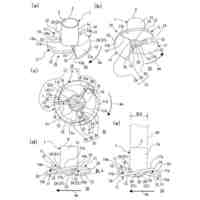
実施例1に係る制御システムを搭載した作業機械1の一例である油圧ショベルの側面図。
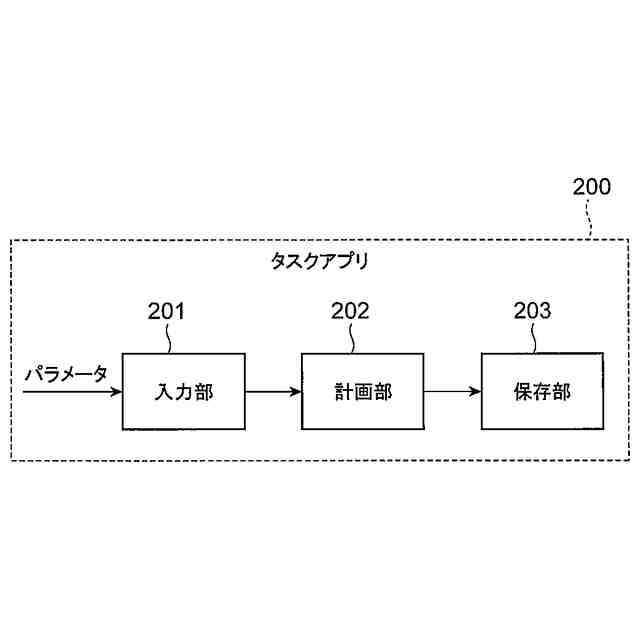
タスクアプリの機能の一例を示す機能ブロック図。
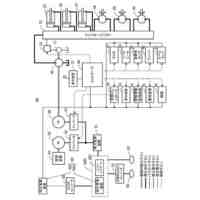
作業機械の動作を制御する制御システムの構成を示す機能ブロック図。
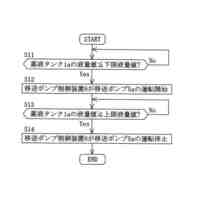
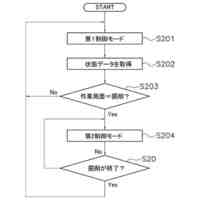
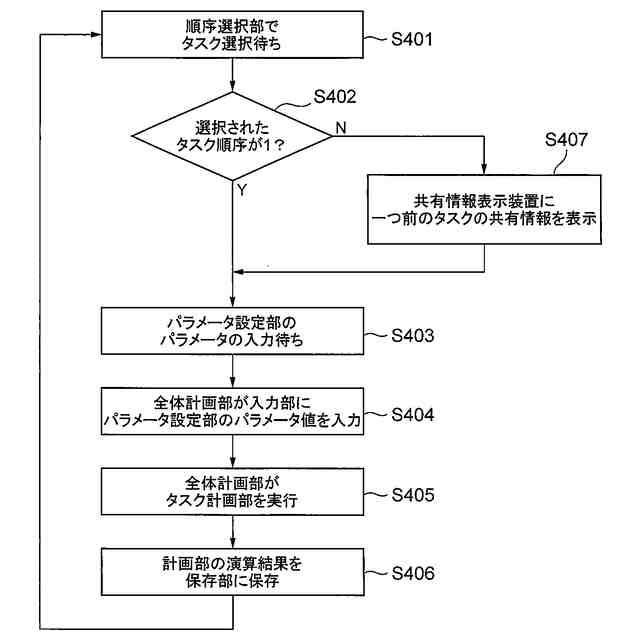
実施例1に係る制御システムを用いて実行する処理を示すフローチャート。
制御システムが取り扱う共有情報の種類及びパラメータ値の一例を示す図表。
実施例2に係る制御システムの構成を示す機能ブロック図。
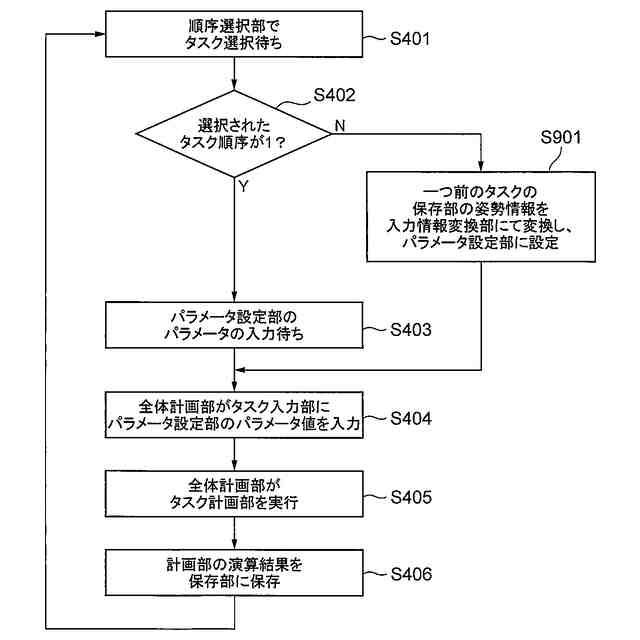
実施例2に係る制御システムを用いて実行する処理を示すフローチャート。
実施例3に係る制御システムの構成を示す機能ブロック図。
実施例3に係る制御システムを用いて実行する処理を示すフローチャート。
実施例4に係る制御システムの構成を示す機能ブロック図。
実施例4に係る制御システムが利用するタスクアプリの機能を示す機能ブロック図。
実施例4に係る制御システムを用いて実行する処理を示すフローチャート。
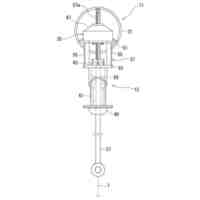
実施例5に係る制御システムが使用する掘削アプリの機能構成を示すブロック図。
掘削アプリを用いて実行する処理を示すフローチャート。
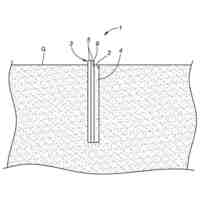
掘削処理及び掘削アプリに入力するデータ種の具体例を示す図。
実施例6に係る制御システムを搭載した作業機械1の一例である油圧ショベルの側面図。
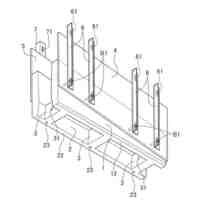
実施例6に係る制御システムが使用するピック&プレースアプリの機能構成を示すブロック図。
ピック&プレースアプリを用いて実行する処理を示すフローチャート。
実施例7に係る制御システムが使用する面成型アプリの機能構成を示すブロック図。
面成型アプリを用いて実行する処理を示すフローチャート。
実施例7に係る制御システムが使用する土羽打ちアプリの機能構成を示すブロック図。
土羽打ちアプリを用いて実行する処理を示すフローチャート。
実施例8に係る制御システムを搭載した作業機械1の一例である油圧ショベルの側面図。
実施例8に係る制御システムが使用するバケット変更アプリの機能構成を示すブロック図。
バケット変更アプリを用いて実行する処理を示すフローチャート。
制御システムが使用可能なタスクアプリ例、それぞれのタスクアプリに入力されるパラメータ値及びアプリにより実現される動作の一覧。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
住友建機株式会社
電動ショベル
9日前
住友重機械工業株式会社
ショベル
9日前
個人
丸太等の柱断面にU字型工作物を付設する柱
3日前
株式会社ケー・エフ・シー
注入薬液移送システム
9日前
調和工業株式会社
振動補助装置及び施工方法
4日前
五洋建設株式会社
洗掘防止構造及びその構築方法
9日前
株式会社安藤・間
杭の応力算定モデルの設定方法
2日前
住友重機械工業株式会社
ショベル及びショベルの制御装置
9日前
株式会社カテックス
インサート構造体及び地山補強工法
4日前
ヤンマーホールディングス株式会社
作業機械
2日前
五洋建設株式会社
鋼製筒状体の傾斜計測装置及び傾斜角計測方法
9日前
株式会社大林組
貫入抵抗低減装置及びサクション構造体の貫入方法
9日前
株式会社小松製作所
キャブおよび作業車両
2日前
株式会社小松製作所
作業機械および作業機械の制御方法
9日前
株式会社小松製作所
作業機械および作業機械の制御方法
9日前
大和ハウス工業株式会社
型枠ユニット
3日前
住友建機株式会社
ショベル
3日前
豊国工業株式会社
水門開閉装置のロープ長さ調整装置
9日前
三井住友建設株式会社
振動低減仮設構造並びにその構築方法及び撤去方法
9日前
株式会社小松製作所
作業機械、及び、作業機械を制御するための方法
3日前
有限会社 創友
擁壁用笠ブロックおよびその設置方法
4日前
東亜建設工業株式会社
杭状体の打設システムおよび打設方法
2日前
三谷セキサン株式会社
翼を備えた鋼管杭
3日前
清水建設株式会社
地盤改良工法及びその工法に使用するモニタの流路構造
9日前
ヤンマーホールディングス株式会社
作業機械用表示制御システム、作業機械用表示システム、作業機械、作業機械用表示制御方法及び作業機械用表示制御プログラム
3日前
他の特許を見る







 特許ウォッチ
特許ウォッチ