TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024044562
公報種別
公開特許公報(A)
公開日
2024-04-02
出願番号
2022150156
出願日
2022-09-21
発明の名称
目標観測誤差補正システム
出願人
三菱電機株式会社
代理人
個人
主分類
G01S
13/66 20060101AFI20240326BHJP(測定;試験)
要約
【課題】プラットホーム間の時刻バイアス誤差を推定して補正する目標観測誤差補正システムを得ること。
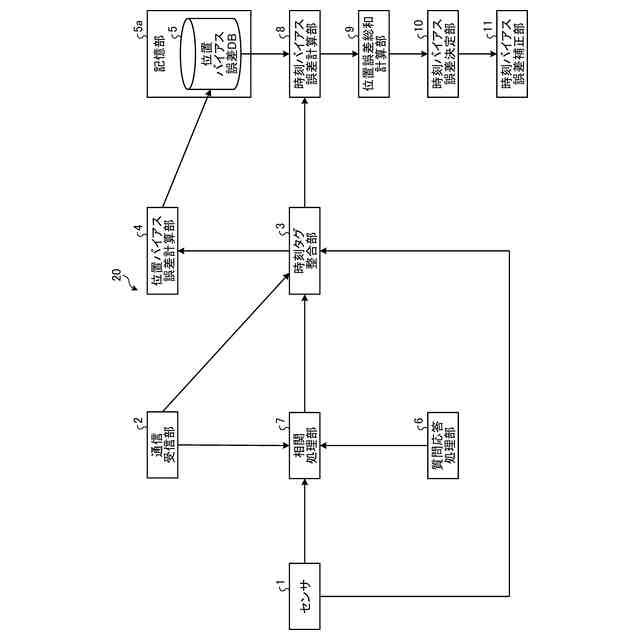
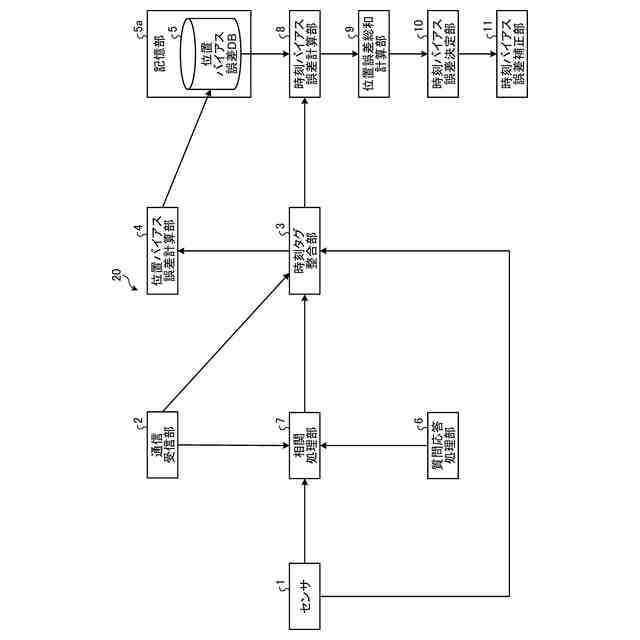
【解決手段】事前処理で得られた第1の自プラットホーム目標情報と第1の他プラットホーム目標情報とに基づくプラットホーム間の位置バイアス誤差を用いて実運用処理の放送型自動従属監視で応答のあった目標に対して第2の自プラットホーム目標情報及び第2の他プラットホーム目標情報の時刻バイアス誤差を算出する時刻バイアス誤差計算部8と、各目標のプラットホーム間の時刻バイアス誤差に対する位置誤差総和を算出する位置誤差総和計算部9と、位置誤差総和が最小の目標のプラットホーム間の時刻バイアス誤差をプラットホーム間の時刻バイアス誤差とする時刻バイアス誤差決定部10と、プラットホーム間の時刻バイアス誤差に基づいて自プラットホームの時刻を補正する時刻バイアス誤差補正部11と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
事前処理において同一の静止目標を捕捉して自プラットホームで得られた第1の自プラットホーム目標情報と他プラットホームで得られた第1の他プラットホーム目標情報とを用いて算出されたプラットホーム間の位置バイアス誤差を用いて、実運用処理において放送型自動従属監視に対して応答のあった目標に対して自プラットホームで得られた第2の自プラットホーム目標情報及び他プラットホームで得られた第2の他プラットホーム目標情報のプラットホーム間の時刻バイアス誤差を算出する時刻バイアス誤差計算部と、
各目標の前記プラットホーム間の時刻バイアス誤差に対する位置誤差総和を算出する位置誤差総和計算部と、
各目標についての前記位置誤差総和の内、値が最小となった目標のプラットホーム間の時刻バイアス誤差を前記第2の自プラットホーム目標情報及び前記第2の他プラットホーム目標情報のプラットホーム間の時刻バイアス誤差と決定する時刻バイアス誤差決定部と、
前記時刻バイアス誤差決定部で決定された前記プラットホーム間の時刻バイアス誤差に基づいて、自プラットホームの時刻の補正を実施する時刻バイアス誤差補正部と、
を備えることを特徴とする目標観測誤差補正システム。
続きを表示(約 1,300 文字)
【請求項2】
前記事前処理において、前記静止目標を捕捉して得た目標位置及び時刻タグを含む前記第1の自プラットホーム目標情報を生成するセンサと、
前記事前処理において、前記他プラットホームから前記静止目標を捕捉して得た位置及び時刻タグを含む前記第1の他プラットホーム目標情報を受信する通信受信部と、
前記事前処理において、前記第1の自プラットホーム目標情報に含まれる時刻タグと前記第1の他プラットホーム目標情報に含まれる時刻タグとを比較し、最も近い時刻タグの前記第1の自プラットホーム目標情報と前記第1の他プラットホーム目標情報との組み合わせを検出して時刻整合後の前記第1の自プラットホーム目標情報及び前記第1の他プラットホーム目標情報として出力する時刻タグ整合部と、
前記事前処理において、時刻整合後の前記第1の自プラットホーム目標情報及び前記第1の他プラットホーム目標情報に含まれる位置に基づいて、前記プラットホーム間の位置バイアス誤差を算出する位置バイアス誤差計算部と、
を備えることを特徴とする請求項1に記載の目標観測誤差補正システム。
【請求項3】
前記センサは、前記実運用処理において、前記目標を捕捉して得た位置、時刻タグ、及び速度を含む前記第2の自プラットホーム目標情報を生成し、
前記通信受信部は、前記実運用処理において、前記他プラットホームから前記目標を捕捉して得られた位置、時刻タグ、及び速度を含む前記第2の自プラットホーム目標情報を受信し、
さらに、
前記実運用処理において、前記放送型自動従属監視を使用し、質問に対して応答が返ってきた前記目標の数を示す応答数、及び応答が返ってきた前記目標の3次元位置を出力する質問応答処理部と、
前記実運用処理において、前記第2の自プラットホーム目標情報、前記第2の他プラットホーム目標情報、前記応答数、及び応答が返ってきた前記目標の3次元位置を入力とし、前記第2の自プラットホーム目標情報及び前記第2の他プラットホーム目標情報に相関処理を実施し、相関処理済み第2の自プラットホーム目標情報及び相関処理済み第2の他プラットホーム目標情報、及び前記応答数を出力する相関処理部と、
を備え、
前記時刻タグ整合部は、前記実運用処理において、前記相関処理済み第2の自プラットホーム目標情報に含まれる時刻タグと、前記相関処理済み第2の他プラットホーム目標情報に含まれる時刻タグとを比較し、最も近い時刻タグの前記相関処理済み第2の自プラットホーム目標情報と前記相関処理済み第2の他プラットホーム目標情報との組み合わせを検出して時刻タグ整合済み前記第2の自プラットホーム目標情報及び前記第2の他プラットホーム目標情報とし、前記応答数とともに前記時刻バイアス誤差計算部に出力する、
ことを特徴とする請求項2に記載の目標観測誤差補正システム。
【請求項4】
前記時刻バイアス誤差計算部は、前記時刻バイアス誤差を算出する処理を前記応答数だけ繰り返し行い、
前記位置誤差総和計算部は、前記位置誤差総和を算出する処理を前記応答数だけ繰り返し行う、
ことを特徴とする請求項3に記載の目標観測誤差補正システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、センサネットワークで使用される目標観測誤差補正システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、艦艇など海上を航行する移動体や空中を飛行する移動体や陸上を走行する移動体であるプラットホームが構築しているセンサネットワークを他プラットホームのセンサネットワークに接続して目標情報を融合する場合、各プラットホームのセンサの取り付け位置の誤差などに起因する位置バイアス誤差によって、本来は同一である目標が複数の目標に認識されてしまうなど、運用上の障害となる可能性がある。このような問題に対して、特許文献1には、位置バイアス誤差を補正するため、高精度に位置バイアス誤差を推定する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第5595181号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来の技術によれば、GPS(Global Positioning System)を搭載し、位置バイアス誤差が存在しないセンサと位置バイアス誤差が存在するセンサとを用いることによって位置バイアス誤差を推定している。そのため、サイバー攻撃などによるGPSの欺瞞によって基準となるセンサのGPSデータに時刻のバイアス誤差が含まれると、位置バイアス誤差を精度良く推定することが出来ない、という問題があった。
【0005】
本開示は、上記に鑑みてなされたものであって、プラットホーム間の時刻バイアス誤差を推定して補正する目標観測誤差補正システムを得ることを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本開示の目標観測誤差補正システムは、事前処理において同一の静止目標を捕捉して自プラットホームで得られた第1の自プラットホーム目標情報と他プラットホームで得られた第1の他プラットホーム目標情報とを用いて算出されたプラットホーム間の位置バイアス誤差を用いて、実運用処理において放送型自動従属監視に対して応答のあった目標に対して自プラットホームで得られた第2の自プラットホーム目標情報及び他プラットホームで得られた第2の他プラットホーム目標情報のプラットホーム間の時刻バイアス誤差を算出する時刻バイアス誤差計算部と、各目標のプラットホーム間の時刻バイアス誤差に対する位置誤差総和を算出する位置誤差総和計算部と、各目標についての位置誤差総和の内、値が最小となった目標のプラットホーム間の時刻バイアス誤差を第2の自プラットホーム目標情報及び第2の他プラットホーム目標情報のプラットホーム間の時刻バイアス誤差と決定する時刻バイアス誤差決定部と、時刻バイアス誤差決定部で決定されたプラットホーム間の時刻バイアス誤差に基づいて、自プラットホームの時刻の補正を実施する時刻バイアス誤差補正部と、を備えることを特徴とする。
【発明の効果】
【0007】
本開示の目標観測誤差補正システムは、プラットホーム間の時刻バイアス誤差を推定して補正することが出来る、という効果を奏する。
【図面の簡単な説明】
【0008】
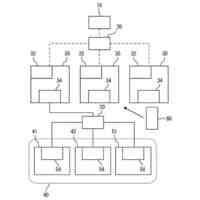
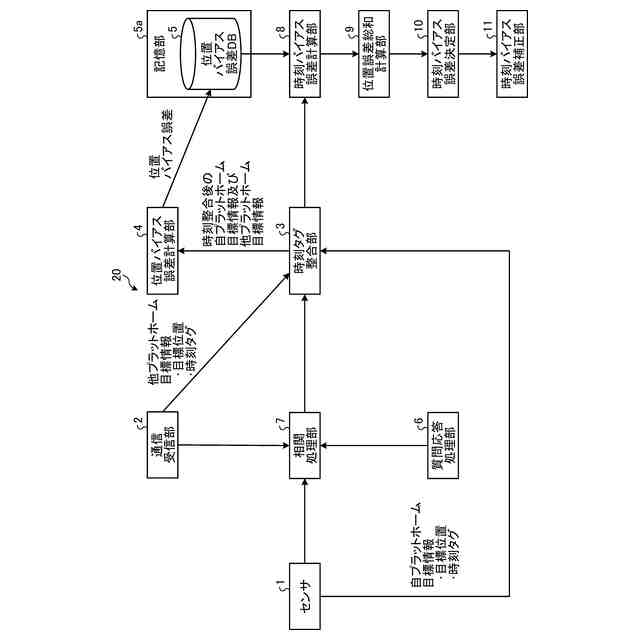
実施の形態に係る目標観測誤差補正システムの構成例を示す図
実施の形態に係る目標観測誤差補正システムの事前処理において各構成間で入出力される情報の例を示す図
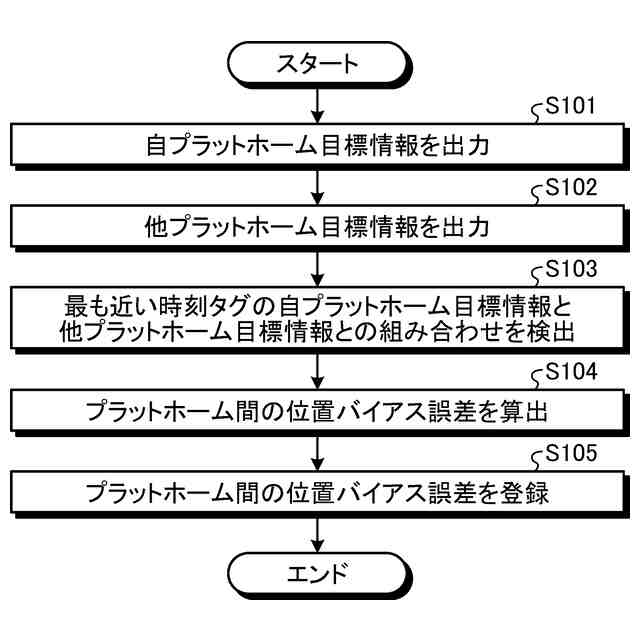
実施の形態に係る目標観測誤差補正システムの事前処理を示すフローチャート
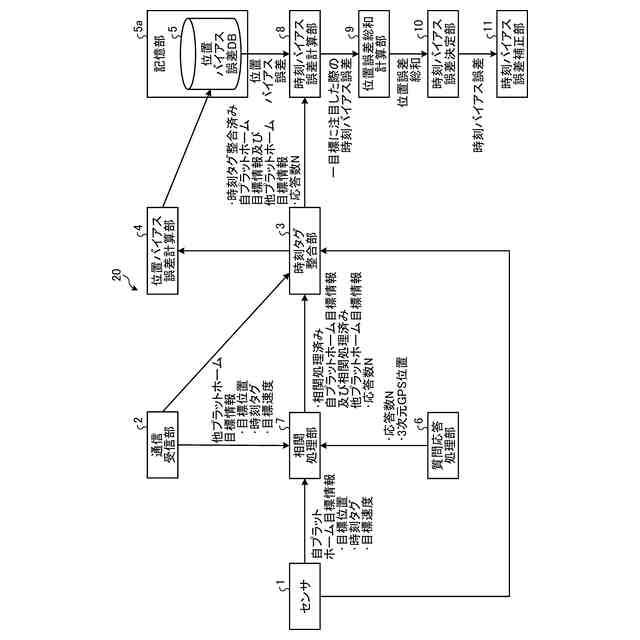
実施の形態に係る目標観測誤差補正システムの実運用処理において各構成間で入出力される情報の例を示す図
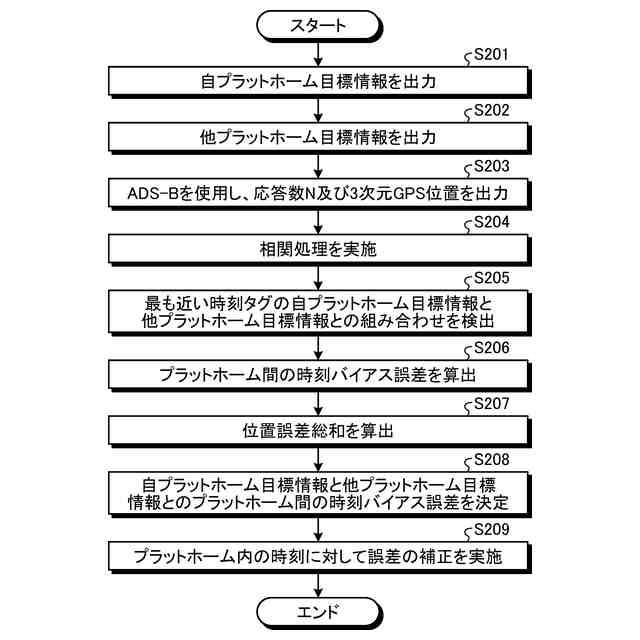
実施の形態に係る目標観測誤差補正システムの実運用処理を示すフローチャート
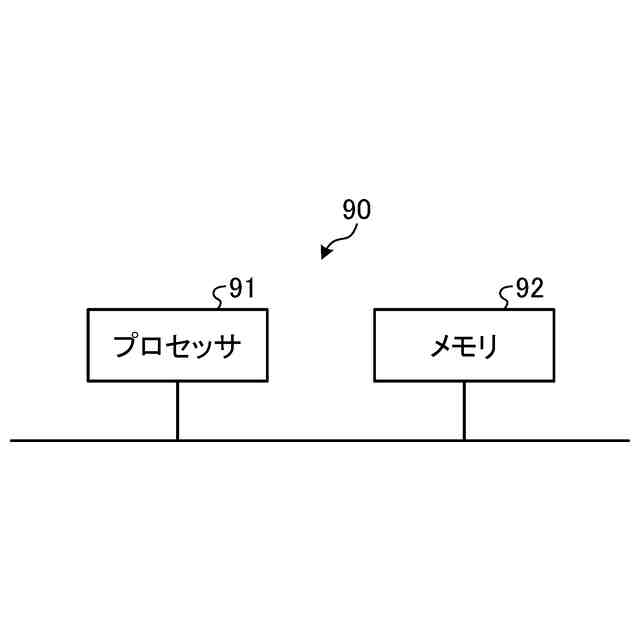
実施の形態に係る目標観測誤差補正システムが備える処理回路をプロセッサ及びメモリで実現する場合の処理回路の構成の一例を示す図
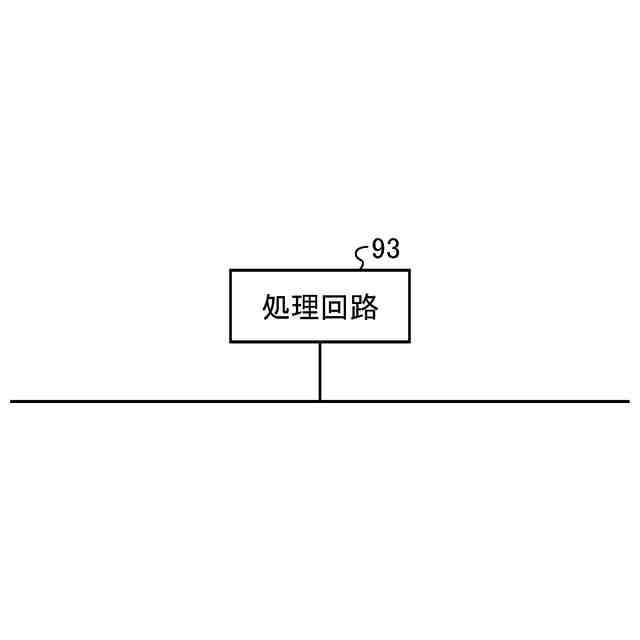
実施の形態に係る目標観測誤差補正システムが備える処理回路を専用のハードウェアで実現する場合の処理回路の構成の一例を示す図
【発明を実施するための形態】
【0009】
以下に、本開示の実施の形態に係る目標観測誤差補正システムを図面に基づいて詳細に説明する。
【0010】
実施の形態.
図1は、本実施の形態に係る目標観測誤差補正システム20の構成例を示す図である。目標観測誤差補正システム20は、センサ1と、通信受信部2と、時刻タグ整合部3と、位置バイアス誤差計算部4と、位置バイアス誤差DB(Data Base)5を格納する記憶部5aと、質問応答処理部6と、相関処理部7と、時刻バイアス誤差計算部8と、位置誤差総和計算部9と、時刻バイアス誤差決定部10と、時刻バイアス誤差補正部11と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
冷蔵庫
9日前
三菱電機株式会社
食器乾燥機
10日前
三菱電機株式会社
加熱調理器
9日前
三菱電機株式会社
電気掃除機
9日前
三菱電機株式会社
電気掃除機
3日前
三菱電機株式会社
通信システム
2日前
三菱電機株式会社
貯湯式給湯機
9日前
三菱電機株式会社
非常用照明装置
6日前
三菱電機株式会社
掃除機システム
9日前
三菱電機株式会社
光信号処理装置
4日前
三菱電機株式会社
保護リレー装置
5日前
三菱電機株式会社
保護リレー装置
5日前
三菱電機株式会社
無線通信システム
5日前
三菱電機株式会社
照明制御システム
9日前
三菱電機株式会社
誘導装置および誘導方法
4日前
三菱電機株式会社
画像解析装置及び画像解析方法
4日前
三菱電機株式会社
乳幼児監視装置及び乳幼児監視方法
5日前
三菱電機株式会社
半導体モジュールおよび半導体装置
6日前
三菱電機株式会社
冷却構造及びそれを用いた半導体装置
10日前
三菱電機株式会社
アレイアンテナ装置および無線送電装置
4日前
三菱電機株式会社
空気調和機および空気調和機の制御方法
5日前
三菱電機株式会社
半導体装置および半導体装置の製造方法
2日前
三菱電機株式会社
電磁波計算システムおよびバックデータの取得方法
6日前
三菱電機株式会社
検索装置、検索システム、および、検索プログラム
5日前
三菱電機株式会社
電力変換装置、電力変換方法および直流配電システム
9日前
三菱電機株式会社
ストレートボタン構造およびストレートボタン構造群
2日前
三菱電機株式会社
半導体装置、電力変換装置及び半導体装置の製造方法
9日前
三菱電機株式会社
車名認識装置、車名認識方法、及び車名認識プログラム
9日前
三菱電機株式会社
車載器、料金収受方法およびアプリケーションプログラム
3日前
三菱電機株式会社
回転電機の固定子、回転電機、および回転電機の製造方法
10日前
三菱電機株式会社
照明器具
9日前
三菱電機株式会社
コンパイラ依存性抽出装置およびソースコード解析システム
2日前
三菱電機株式会社
店舗支援システム、店舗支援方法、および店舗支援プログラム
2日前
三菱電機株式会社
店舗支援システム、店舗支援方法、および店舗支援プログラム
2日前
三菱電機株式会社
データ変換装置、分析システム、データ変換方法、及び、プログラム
5日前
三菱電機株式会社
電子料金収受システム、電子料金収受方法、及び電子料金収受プログラム
2日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ