TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025152932
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024055120
出願日
2024-03-28
発明の名称
ロボットおよびロボットシステム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
9/06 20060101AFI20251002BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】第2アームの低背化を図ることのできるロボットおよびロボットシステムを提供する。
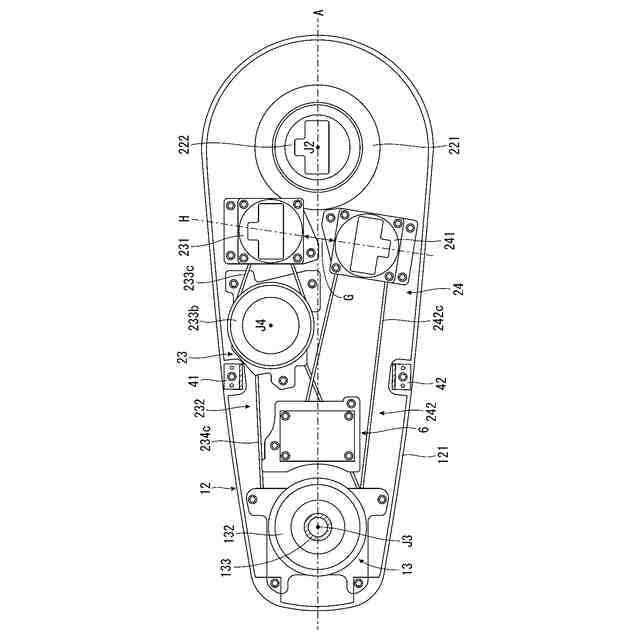
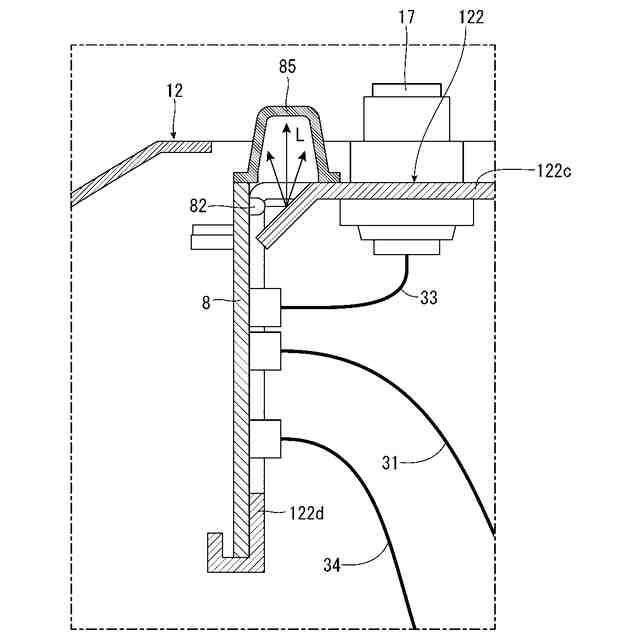
【解決手段】ロボットは、基台と、基台に対して第1回動軸まわりに回動する第1アームと、第1アームに対して第2回動軸まわりに回動する第2アームと、第2アームに対して第3回動軸に沿って直動し、かつ、第3回動軸まわりに回動するシャフトと、シャフトを第3回動軸に沿って直動させる第1モーターと、シャフトを第3回動軸まわりに回動させる第2モーターと、基台と第2アームとを接続し、基台内に臨む基端開口と、第2アーム内に臨む先端開口と、を備えるダクトと、ダクトから第2アーム内に引き込まれた配線を保持する配線保持部材と、を有する。そして、配線は、第1モーターと第2モーターとの間を通って第2アームの先端側に引き回されている。
【選択図】図3
特許請求の範囲
【請求項1】
基台と、
前記基台に連結され、前記基台に対して第1回動軸まわりに回動する第1アームと、
基端部において前記第1アームに連結され、前記第1アームに対して前記第1回動軸と平行な第2回動軸まわりに回動する第2アームと、
前記第2アームの先端部に配置され、前記第2アームに対して前記第1回動軸と平行な第3回動軸に沿って直動し、かつ、前記第3回動軸まわりに回動するシャフトと、
前記第2アーム内に配置され、前記シャフトを前記第2アームに対して前記第3回動軸に沿って直動させる第1モーターと、
前記第2アーム内に配置され、前記シャフトを前記第2アームに対して前記第3回動軸まわりに回動させる第2モーターと、
前記基台と前記第2アームとを接続し、前記基台内に臨む基端開口と、前記第2アーム内に臨む先端開口と、を備えるダクトと、
前記ダクト内を通って前記基台内から前記第2アーム内に引き込まれている配線と、
前記第2アーム内に配置され、前記ダクトから前記第2アーム内に引き込まれた前記配線を保持する保持部を備える配線保持部材と、を有し、
前記第2アームは、前記第1アームに連結され、前記第1モーターおよび前記第2モーターを保持するアームベースと、前記アームベースに固定され、前記ダクトが接続される接続部を備えるフレームと、を有し、
前記第2回動軸に直交し、かつ、前記第2回動軸と前記第3回動軸とを通る線分を前記第2アームの仮想中心軸としたとき、
前記第1モーターおよび前記第2モーターは、前記第2回動軸に沿う方向からの平面視で、前記仮想中心軸に交差する方向に沿って並設され、
前記ダクトの前記先端開口は、前記第1モーターおよび前記第2モーターよりも前記第2アームの基端側に位置し、
前記仮想中心軸に沿う方向からの平面視で、前記保持部は、前記第1モーターおよび前記第2モーターの間に位置し、
前記配線は、前記第1モーターおよび前記第2モーターの間を通って前記第2アームの先端側に引き回されていることを特徴とするロボット。
続きを表示(約 1,600 文字)
【請求項2】
前記仮想中心軸に沿う方向からの平面視で、前記保持部および前記先端開口は、それぞれ、前記第1モーターおよび前記第2モーターの間に位置している請求項1に記載のロボット。
【請求項3】
前記ダクトは、前記先端開口が前記第2アームの先端側を向くように配置されている請求項1に記載のロボット。
【請求項4】
前記保持部は、前記ダクトの中心軸に沿って配置されている請求項1に記載のロボット。
【請求項5】
前記ダクトの中心軸に沿う方向からの平面視で、前記先端開口と前記保持部とが重なっている請求項1に記載のロボット。
【請求項6】
前記配線保持部材は、前記フレームに固定されている請求項1に記載のロボット。
【請求項7】
前記第1回動軸は、鉛直方向に沿い、
前記第1モーターの上端および前記第2モーターの上端の高い方よりも下側に前記保持部および前記先端開口が位置し、
前記仮想中心軸に沿う方向からの平面視で、前記保持部および前記先端開口は、それぞれ、前記第1モーターおよび前記第2モーターの間に位置し、
前記ダクトは、前記先端開口が前記第2アームの先端側を向くように配置され、
前記配線保持部材は、前記フレームに固定され、
前記保持部は、前記ダクトの中心軸に沿って配置され、かつ、前記ダクトの中心軸に沿う方向からの平面視で、前記先端開口と重なり、さらには、前記仮想中心軸に沿う方向からの平面視で、前記第1モーターおよび前記第2モーターの間の距離よりも幅が小さい請求項1に記載のロボット。
【請求項8】
ロボットと、
前記ロボットの駆動を制御する制御装置と、を有し、
前記ロボットは、基台と、
前記基台に連結され、前記基台に対して第1回動軸まわりに回動する第1アームと、
基端部において前記第1アームに連結され、前記第1アームに対して前記第1回動軸と平行な第2回動軸まわりに回動する第2アームと、
前記第2アームの先端部に配置され、前記第2アームに対して前記第1回動軸と平行な第3回動軸に沿って直動し、かつ、前記第3回動軸まわりに回動するシャフトと、
前記第2アーム内に配置され、前記シャフトを前記第2アームに対して前記第3回動軸に沿って直動させる第1モーターと、
前記第2アーム内に配置され、前記シャフトを前記第2アームに対して前記第3回動軸まわりに回動させる第2モーターと、
前記基台と前記第2アームとを接続し、前記基台内に臨む基端開口と、前記第2アーム内に臨む先端開口と、を備えるダクトと、
前記ダクト内を通って前記基台内から前記第2アーム内に引き込まれている配線と、
前記第2アーム内に配置され、前記ダクトから前記第2アーム内に引き込まれた前記配線を保持する保持部を備える配線保持部材と、を有し、
前記第2アームは、前記第1アームに連結され、前記第1モーターおよび前記第2モーターを保持するアームベースと、前記アームベースに固定され、前記ダクトが接続される接続部を備えるフレームと、を有し、
前記第2回動軸に直交し、かつ、前記第2回動軸と前記第3回動軸とを通る線分を前記第2アームの仮想中心軸としたとき、
前記第1モーターおよび前記第2モーターは、前記第2回動軸に沿う方向からの平面視で、前記仮想中心軸に交差する方向に沿って並設され、
前記ダクトの前記先端開口は、前記第1モーターおよび前記第2モーターよりも前記第2アームの基端側に位置し、
前記仮想中心軸に沿う方向からの平面視で、前記保持部は、前記第1モーターおよび前記第2モーターの間に位置し、
前記配線は、前記第1モーターおよび前記第2モーターの間を通って前記第2アームの先端側に引き回されていることを特徴とするロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットおよびロボットシステムに関する。
続きを表示(約 3,700 文字)
【背景技術】
【0002】
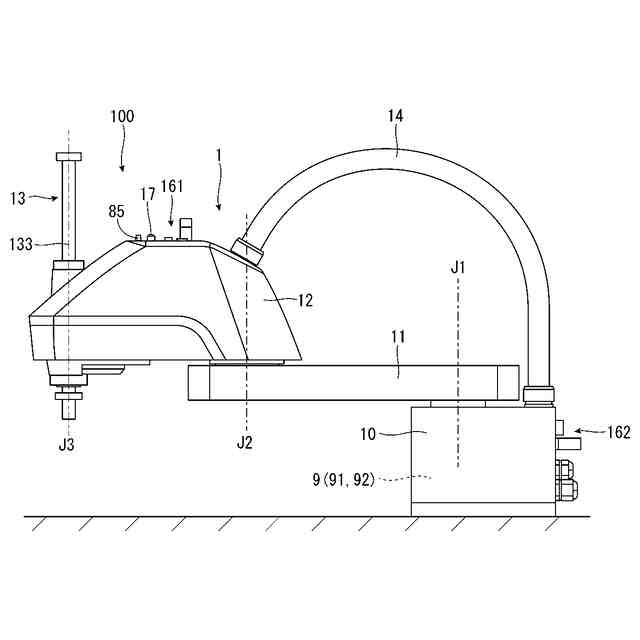
特許文献1に記載されたスカラロボット(水平多関節ロボット)は、基台と、基台に対して鉛直方向に沿う第1回動軸まわりに回動可能に連結された第1アームと、第1アームに対して鉛直方向に沿う第2回動軸まわりに回動可能に連結された第2アームと、第2アームに配置された作業ヘッドと、を有する。また、作業ヘッドは、第2アームに対して鉛直方向に沿う第3回動軸に沿って直動(昇降)可能であり、かつ、第3回動軸まわりに回動可能であるシャフトを有する。また、第2アーム内には、第2アームを第1アームに対して第2回動軸まわりに回動させるためのモーターと、シャフトを第2アームに対して第3回動軸に沿って直動させるためのモーターと、シャフトを第2アームに対して第3回動軸まわりに回動させるモーターと、が配置されている。また、スカラロボットは、基台と第2アームとを繋ぐ配管部材(コンジットチューブ)を有し、この配管部材内を通って基台から第2アーム内に各モーター用の信号線が引き込まれている。
【先行技術文献】
【特許文献】
【0003】
特開2019-209384号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このようなスカラロボットでは、配管部材を介して第2アーム内に引き込まれた各モーター用の信号線がモーターの上方を通過するように引き回されている。そのため、各モーターの上方に信号線を引き回すための空間が必要となり、第2アームの低背化を図ることが難しい。
【課題を解決するための手段】
【0005】
本発明のロボットは、基台と、
前記基台に連結され、前記基台に対して第1回動軸まわりに回動する第1アームと、
基端部において前記第1アームに連結され、前記第1アームに対して前記第1回動軸と平行な第2回動軸まわりに回動する第2アームと、
前記第2アームの先端部に配置され、前記第2アームに対して前記第1回動軸と平行な第3回動軸に沿って直動し、かつ、前記第3回動軸まわりに回動するシャフトと、
前記第2アーム内に配置され、前記シャフトを前記第2アームに対して前記第3回動軸に沿って直動させる第1モーターと、
前記第2アーム内に配置され、前記シャフトを前記第2アームに対して前記第3回動軸まわりに回動させる第2モーターと、
前記基台と前記第2アームとを接続し、前記基台内に臨む基端開口と、前記第2アーム内に臨む先端開口と、を備えるダクトと、
前記ダクト内を通って前記基台内から前記第2アーム内に引き込まれている配線と、
前記第2アーム内に配置され、前記ダクトから前記第2アーム内に引き込まれた前記配線を保持する保持部を備える配線保持部材と、を有し、
前記第2アームは、前記第1アームに連結され、前記第1モーターおよび前記第2モーターを保持するアームベースと、前記アームベースに固定され、前記ダクトが接続される接続部を備えるフレームと、を有し、
前記第2回動軸に直交し、かつ、前記第2回動軸と前記第3回動軸とを通る線分を前記第2アームの仮想中心軸としたとき、
前記第1モーターおよび前記第2モーターは、前記第2回動軸に沿う方向からの平面視で、前記仮想中心軸に交差する方向に沿って並設され、
前記ダクトの前記先端開口は、前記第1モーターおよび前記第2モーターよりも前記第2アームの基端側に位置し、
前記仮想中心軸に沿う方向からの平面視で、前記保持部は、前記第1モーターおよび前記第2モーターの間に位置し、
前記配線は、前記第1モーターおよび前記第2モーターの間を通って前記第2アームの先端側に引き回されている。
【0006】
本発明のロボットシステムは、ロボットと、
前記ロボットの駆動を制御する制御装置と、を有し、
前記ロボットは、基台と、
前記基台に連結され、前記基台に対して第1回動軸まわりに回動する第1アームと、
基端部において前記第1アームに連結され、前記第1アームに対して前記第1回動軸と平行な第2回動軸まわりに回動する第2アームと、
前記第2アームの先端部に配置され、前記第2アームに対して前記第1回動軸と平行な第3回動軸に沿って直動し、かつ、前記第3回動軸まわりに回動するシャフトと、
前記第2アーム内に配置され、前記シャフトを前記第2アームに対して前記第3回動軸に沿って直動させる第1モーターと、
前記第2アーム内に配置され、前記シャフトを前記第2アームに対して前記第3回動軸まわりに回動させる第2モーターと、
前記基台と前記第2アームとを接続し、前記基台内に臨む基端開口と、前記第2アーム内に臨む先端開口と、を備えるダクトと、
前記ダクト内を通って前記基台内から前記第2アーム内に引き込まれている配線と、
前記第2アーム内に配置され、前記ダクトから前記第2アーム内に引き込まれた前記配線を保持する保持部を備える配線保持部材と、を有し、
前記第2アームは、前記第1アームに連結され、前記第1モーターおよび前記第2モーターを保持するアームベースと、前記アームベースに固定され、前記ダクトが接続される接続部を備えるフレームと、を有し、
前記第2回動軸に直交し、かつ、前記第2回動軸と前記第3回動軸とを通る線分を前記第2アームの仮想中心軸としたとき、
前記第1モーターおよび前記第2モーターは、前記第2回動軸に沿う方向からの平面視で、前記仮想中心軸に交差する方向に沿って並設され、
前記ダクトの前記先端開口は、前記第1モーターおよび前記第2モーターよりも前記第2アームの基端側に位置し、
前記仮想中心軸に沿う方向からの平面視で、前記保持部は、前記第1モーターおよび前記第2モーターの間に位置し、
前記配線は、前記第1モーターおよび前記第2モーターの間を通って前記第2アームの先端側に引き回されている。
【図面の簡単な説明】
【0007】
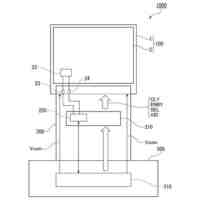
好適な実施形態に係るロボットを示す側面図である。
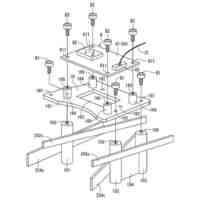
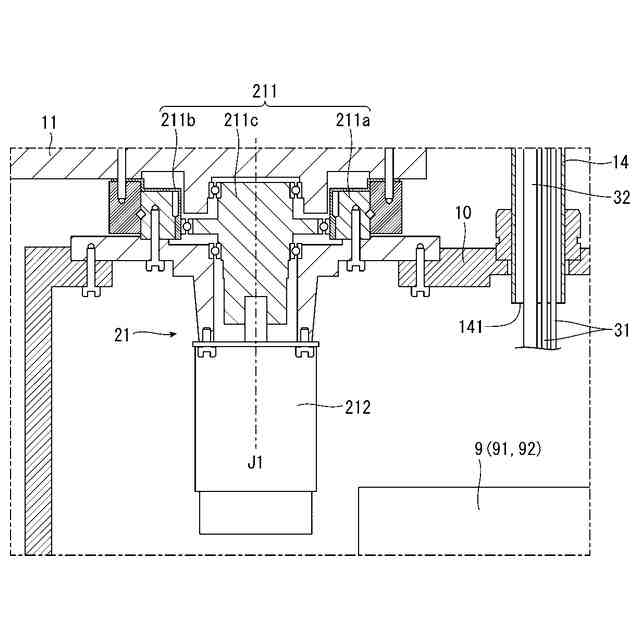
基台と第1アームとの連結部分を示す断面図である。
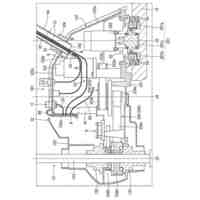
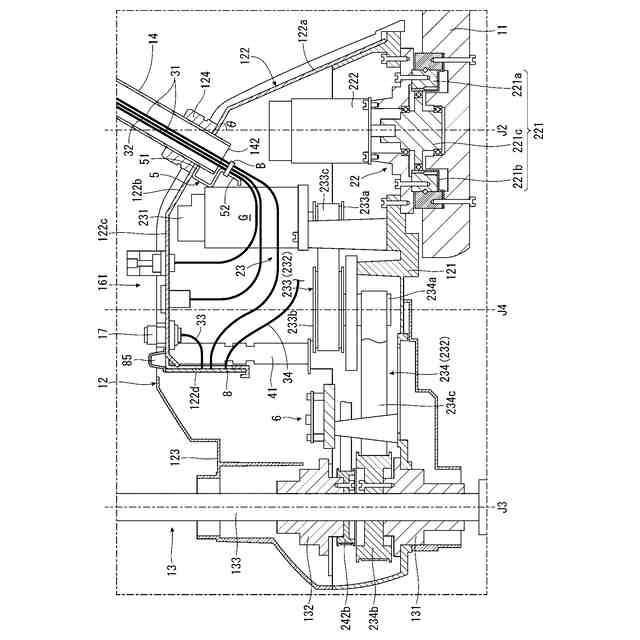
第2アームを横方向一方側から見た断面図である。
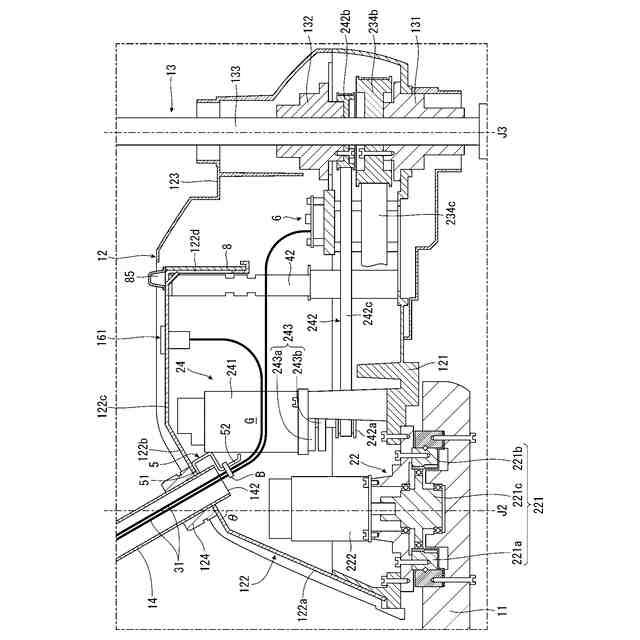
第2アームを横方向他方側から見た断面図である。
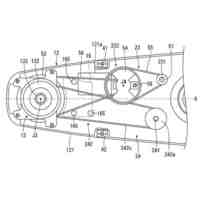
第2アームの内部を示す上面図である。
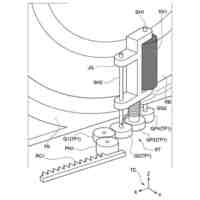
フレームの先端部分を示す斜視図である。
フレームの先端部分を示す断面図である。
第2アームの先端側から仮想中心軸に沿ってダクトを見た平面図である。
配線保持部材の斜視図である。
配線保持部材が配線および配管を保持した状態を示す斜視図である。
ダクトの先端開口付近を拡大して示す断面図である。
ダクトの先端開口と配線保持部材との重なり合いを示す平面図である。
配線保持部材の変形例を示す断面図である。
【発明を実施するための形態】
【0008】
以下、本発明のロボットおよびロボットシステムを添付図面に示す実施形態に基づいて詳細に説明する。
【0009】
図1は、好適な実施形態に係るロボットを示す側面図である。図2は、基台と第1アームとの連結部分を示す断面図である。図3は、第2アームを横方向一方側から見た断面図である。図4は、第2アームを横方向他方側から見た断面図である。図5は、第2アームの内部を示す上面図である。図6は、フレームの先端部分を示す斜視図である。図7は、フレームの先端部分を示す断面図である。図8は、第2アームの先端側から仮想中心軸に沿ってダクトを見た平面図である。図9は、配線保持部材の斜視図である。図10は、配線保持部材が配線および配管を保持した状態を示す斜視図である。図11は、ダクトの先端開口付近を拡大して示す断面図である。図12は、ダクトの先端開口と配線保持部材との重なり合いを示す平面図である。図13は、配線保持部材の変形例を示す断面図である。
【0010】
なお、図1中の上下方向は、鉛直方向と一致している。そのため、以下では、図1中の上側を「上」、下側を「下」とも言う。また、本明細書において「鉛直」とは、鉛直と一致している場合のみならず、本発明の効果を発揮し得る限りの範囲において鉛直に対して傾斜している場合、例えば、鉛直に対して±5°以内で傾斜している場合も含む意味である。同様に、本明細書において「平行」とは、2つの対象が平行と一致している場合のみならず、本発明の効果を発揮し得る限りの範囲において平行から傾斜している場合、例えば、平行に対して±5°以内で傾斜している場合も含む意味である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
セイコーエプソン株式会社
記録装置
2日前
セイコーエプソン株式会社
検査装置
2日前
セイコーエプソン株式会社
システム
2日前
セイコーエプソン株式会社
複写装置
2日前
セイコーエプソン株式会社
液体収容体
2日前
セイコーエプソン株式会社
振動デバイス
1日前
セイコーエプソン株式会社
液体吐出装置
2日前
セイコーエプソン株式会社
遠隔監視装置
2日前
セイコーエプソン株式会社
液体吐出装置
2日前
セイコーエプソン株式会社
液体吐出装置
2日前
セイコーエプソン株式会社
成形品の製造方法
1日前
セイコーエプソン株式会社
処理液および記録方法
1日前
セイコーエプソン株式会社
投写レンズ及び投写装置
1日前
セイコーエプソン株式会社
電子機器および表示装置
1日前
セイコーエプソン株式会社
プログラム及び通信方法
1日前
セイコーエプソン株式会社
液体吐出ヘッドの製造方法
1日前
セイコーエプソン株式会社
液体吐出ヘッドの製造方法
1日前
セイコーエプソン株式会社
液体吐出ヘッドの製造方法
1日前
セイコーエプソン株式会社
機械学習モデルの解析装置
2日前
セイコーエプソン株式会社
分散剤含有液および分散液
2日前
セイコーエプソン株式会社
プログラム、コンピューター
2日前
セイコーエプソン株式会社
給紙ユニット、及び印刷装置
1日前
セイコーエプソン株式会社
表示モジュール及び電子機器
2日前
セイコーエプソン株式会社
投射方法、及び投射システム
2日前
セイコーエプソン株式会社
給紙ユニット、及び印刷装置
1日前
セイコーエプソン株式会社
記録装置、記録装置の制御方法
2日前
セイコーエプソン株式会社
粘着層形成方法および印刷装置
1日前
セイコーエプソン株式会社
記録装置、記録装置の制御方法
2日前
セイコーエプソン株式会社
ロボットおよびロボットシステム
1日前
セイコーエプソン株式会社
ロボットおよびロボットシステム
1日前
セイコーエプソン株式会社
ロボットおよびロボットシステム
1日前
セイコーエプソン株式会社
ロボットおよびロボットシステム
1日前
セイコーエプソン株式会社
ロボットおよびロボットシステム
1日前
セイコーエプソン株式会社
ロボットおよびロボットシステム
1日前
セイコーエプソン株式会社
ロボットおよびロボットシステム
1日前
セイコーエプソン株式会社
物理量センサー及び慣性計測装置
1日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ