TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025139094
公報種別
公開特許公報(A)
公開日
2025-09-26
出願番号
2024037844
出願日
2024-03-12
発明の名称
制御装置および表示装置
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
19/06 20060101AFI20250918BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】エラーが生じたときのエラーに関連する動作情報の実測値の経時変化を即座に把握することができる制御装置を提供すること。
【解決手段】複数のアームが回転可能に連結されたロボットアームの経時的な動作情報を取得する取得部と、前記ロボットアームの作動にエラーが生じた場合、前記動作情報に基づいて前記エラーの種類を判定する判定部と、前記動作情報と前記エラーの種類とが紐づけられているエラー情報に基づいて、前記判定部が判定した前記エラーの種類に対応する前記動作情報の実測値の経時変化の情報を表示部に表示するよう前記表示部を制御する表示制御部と、を備えることを特徴とする制御装置。
【選択図】図3
特許請求の範囲
【請求項1】
複数のアームが回転可能に連結されたロボットアームの経時的な動作情報を取得する取得部と、
前記ロボットアームの作動にエラーが生じた場合、前記動作情報に基づいて前記エラーの種類を判定する判定部と、
前記動作情報と前記エラーの種類とが紐づけられているエラー情報に基づいて、前記判定部が判定した前記エラーの種類に対応する前記動作情報の実測値の経時変化の情報を表示部に表示するよう前記表示部を制御する表示制御部と、を備えることを特徴とする制御装置。
続きを表示(約 660 文字)
【請求項2】
前記動作情報は、前記アームの速度、加速度およびトルクのうちの少なくとも1つである請求項1に記載の制御装置。
【請求項3】
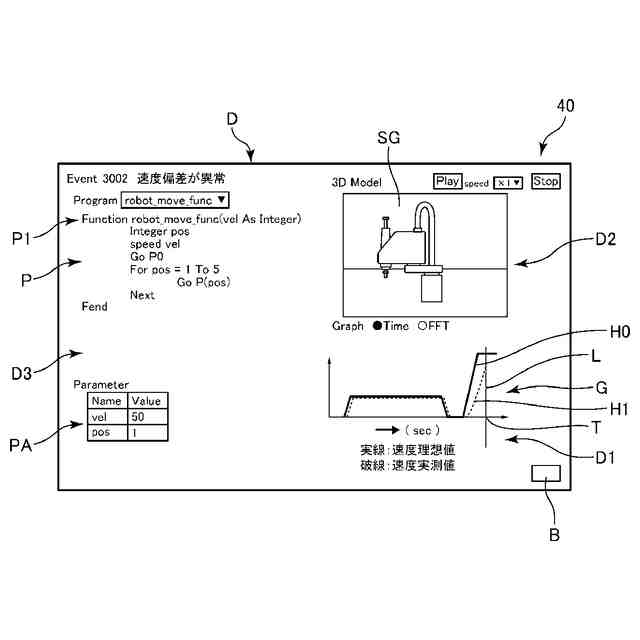
前記経時変化の情報は、横軸が時間、縦軸が前記実測値で表されるグラフである請求項1または2に記載の制御装置。
【請求項4】
前記表示制御部は、前記グラフにおいて、前記エラーが生じた時間の前記実測値を強調して表示するよう前記表示部を制御する請求項3に記載の制御装置。
【請求項5】
前記表示制御部は、前記エラーに関連する単位動作プログラムを含む動作プログラムを表示するよう前記表示部を制御する請求項1に記載の制御装置。
【請求項6】
前記表示制御部は、前記エラーに関連する前記単位動作プログラムを強調して表示するよう前記表示部を制御する請求項5に記載の制御装置。
【請求項7】
複数のアームが回転可能に連結されたロボットアームの経時的な動作情報を取得する取得部と、前記ロボットアームの作動にエラーが生じた場合、前記動作情報に基づいて前記エラーの種類を判定する判定部と、を備える制御装置によって制御される表示装置であって、
表示部と、
前記動作情報と前記エラーの種類とが紐づけられているエラー情報に基づいて、前記判定部が判定した前記エラーの種類に対応する前記動作情報の実測値の経時変化の情報を前記表示部に表示するよう前記表示部を制御する表示制御部と、を備えることを特徴とする表示装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置および表示装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、工場では人件費の高騰や人材不足により、ロボットアームを有するロボットによって例えば機械部品のようなワークの搬送、製造、加工、組み立て、検査等の作業が行われるようになり、人手で行われてきた作業の自動化が進んでいる。このようなロボットでは、ロボットアームの駆動中にエラーが生じることがある。エラーには、ロボット各部の速度の異常、位置の異常および出力トルクの異常等、様々な種類がある。
【0003】
特許文献1には、上記エラーが生じた場合、作業者にその旨を報知する表示装置が開示されている。この表示装置では、上記エラーが生じた際の、ロボット各部の電動モーターの電流値や位置、速度、加速度、位置偏差、速度偏差、加速度偏差に関する様々なグラフ情報等が表示される。
【先行技術文献】
【特許文献】
【0004】
特開2021-091078号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の表示装置では、上述したような様々な情報が単に表示されるだけであり、どのようなエラーが生じたかが直感的に把握しにくいという問題があった。
【課題を解決するための手段】
【0006】
本発明の制御装置は、複数のアームが回転可能に連結されたロボットアームの経時的な動作情報を取得する取得部と、
前記ロボットアームの作動にエラーが生じた場合、前記動作情報に基づいて前記エラーの種類を判定する判定部と、
前記動作情報と前記エラーの種類とが紐づけられているエラー情報に基づいて、前記判定部が判定した前記エラーの種類に対応する前記動作情報の実測値の経時変化の情報を表示部に表示するよう前記表示部を制御する表示制御部と、を備える。
【0007】
本発明の表示装置は、複数のアームが回転可能に連結されたロボットアームの経時的な動作情報を取得する取得部と、前記ロボットアームの作動にエラーが生じた場合、前記動作情報に基づいて前記エラーの種類を判定する判定部と、を備える制御装置によって制御される表示装置であって、
表示部と、
前記動作情報と前記エラーの種類とが紐づけられているエラー情報に基づいて、前記判定部が判定した前記エラーの種類に対応する前記動作情報の実測値の経時変化の情報を前記表示部に表示するよう前記表示部を制御する表示制御部と、を備える。
【図面の簡単な説明】
【0008】
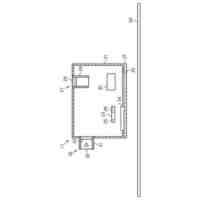
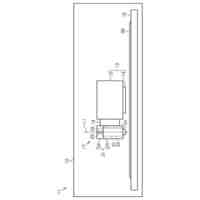
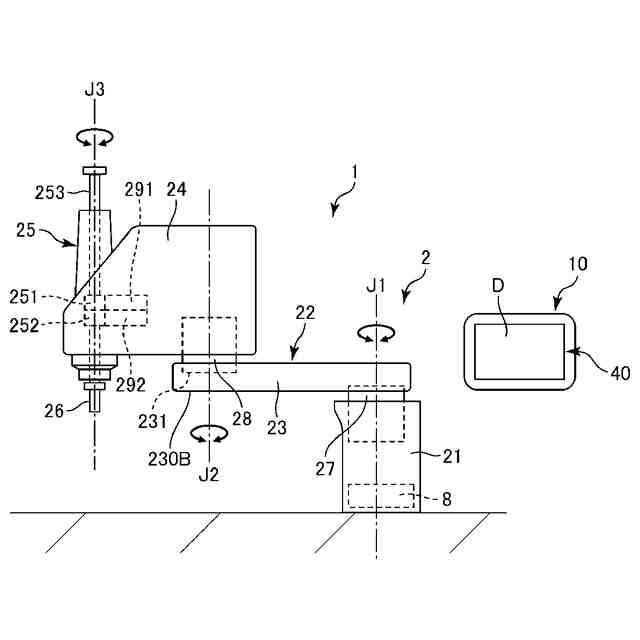
図1は、本発明の制御装置を備えるロボットシステムの概略構成図である。
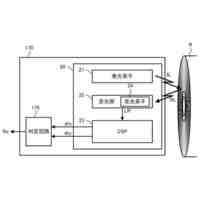
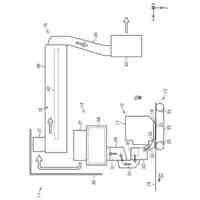
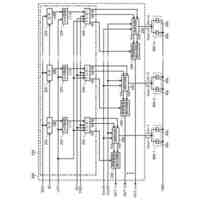
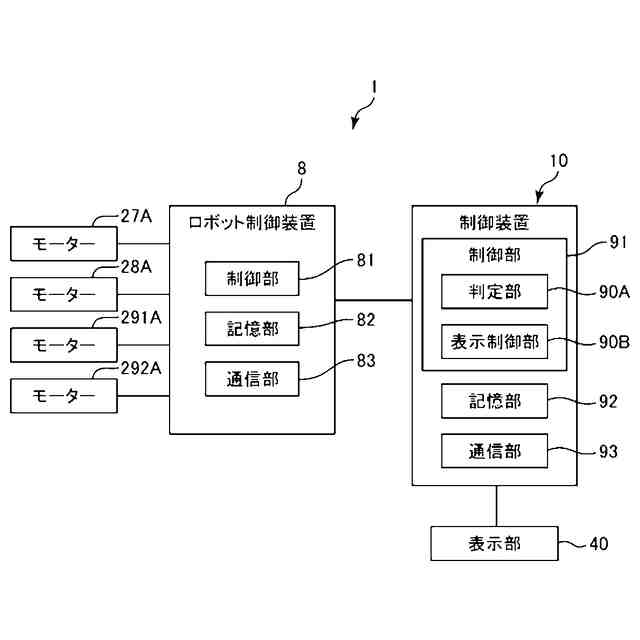
図2は、図1に示すロボットシステムのブロック図である。
図3は、図1に示す表示部に表示される報知画像の一例を示す図である。
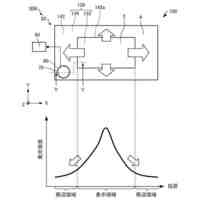
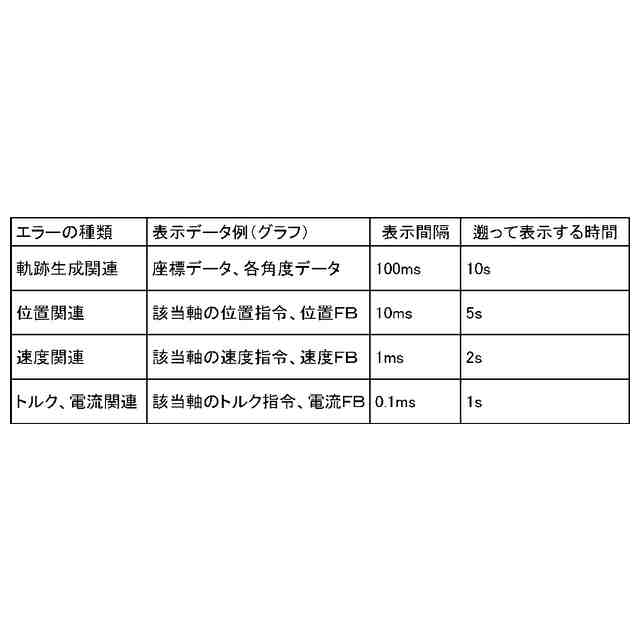
図4は、動作情報とエラーの種類とが紐づけられているエラー情報の一例を示す図である。
図5は、動作情報の実測値の経時変化の情報を示すグラフを作成するためのデータの一例を示す図である。
【発明を実施するための形態】
【0009】
<実施形態>
図1は、本発明の制御装置を備えるロボットシステムの概略構成図である。図2は、図1に示すロボットシステムのブロック図である。図3は、図1に示す表示部に表示される報知画像の一例を示す図である。図4は、動作情報とエラーの種類とが紐づけられているエラー情報の一例を示す図である。図5は、動作情報の実測値の経時変化の情報を示すグラフを作成するためのデータの一例を示す図である。
【0010】
以下、本発明の制御装置および表示装置を添付図面に示す好適な実施形態に基づいて詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
セイコーエプソン株式会社
印刷装置
2日前
セイコーエプソン株式会社
印刷装置
今日
セイコーエプソン株式会社
印刷装置
2日前
セイコーエプソン株式会社
印刷装置
2日前
セイコーエプソン株式会社
印刷装置
今日
セイコーエプソン株式会社
印刷装置
2日前
セイコーエプソン株式会社
気体分離膜
2日前
セイコーエプソン株式会社
画像読取装置
2日前
セイコーエプソン株式会社
液体吐出装置
2日前
セイコーエプソン株式会社
虚像表示装置
2日前
セイコーエプソン株式会社
液体吐出ヘッド
2日前
セイコーエプソン株式会社
プロジェクター
5日前
セイコーエプソン株式会社
電子制御式機械時計
今日
セイコーエプソン株式会社
スクリーンの製造方法
2日前
セイコーエプソン株式会社
三次元造形物の製造方法
2日前
セイコーエプソン株式会社
波長可変干渉フィルター
2日前
セイコーエプソン株式会社
保持方法、及び加工方法
2日前
セイコーエプソン株式会社
治具、及び加工システム
2日前
セイコーエプソン株式会社
搬送装置、及び画像形成装置
2日前
セイコーエプソン株式会社
電気光学装置および電子機器
2日前
セイコーエプソン株式会社
インクジェットインク組成物
2日前
セイコーエプソン株式会社
虚像表示装置及び光学ユニット
2日前
セイコーエプソン株式会社
虚像表示装置及び光学ユニット
2日前
セイコーエプソン株式会社
虚像表示装置及び光学ユニット
2日前
セイコーエプソン株式会社
虚像表示装置及び光学ユニット
2日前
セイコーエプソン株式会社
虚像表示装置及び光学ユニット
2日前
セイコーエプソン株式会社
管理サーバ、及び管理システム
2日前
セイコーエプソン株式会社
虚像表示装置及び光学ユニット
2日前
セイコーエプソン株式会社
媒体排出装置及び画像読取装置
2日前
セイコーエプソン株式会社
制御方法およびロボットシステム
2日前
セイコーエプソン株式会社
固定焦点レンズ及びプロジェクター
5日前
セイコーエプソン株式会社
ヘッドユニット、及び液体吐出装置
2日前
セイコーエプソン株式会社
ヘッドユニット、及び液体吐出装置
今日
セイコーエプソン株式会社
プリントヘッド、及び液体吐出装置
2日前
セイコーエプソン株式会社
表示装置および表示装置の制御方法
2日前
セイコーエプソン株式会社
撮像制御プログラム、及び、印刷システム
2日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ