TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025131314
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024028983
出願日
2024-02-28
発明の名称
位置情報システム
出願人
川崎重工業株式会社
代理人
弁理士法人前田特許事務所
主分類
G05D
1/633 20240101AFI20250902BHJP(制御;調整)
要約
【課題】人と自律走行搬送ロボットとが存在する特定領域における安全性を確保する。
【解決手段】位置情報システム31は、特定領域(建屋12)の地図データ661と、周囲状況を検出することによって自車の位置を推定するセンサ(スキャナ65)と、を有し、かつ特定領域において走行する自律走行搬送ロボット6と、特定領域において人が携帯する通信端末5と、通信端末との近距離無線通信に基づき、人の位置に関する情報を自律走行搬送ロボットに提供する位置情報提供部(システムコントローラ16)と、を備える。
【選択図】図5
特許請求の範囲
【請求項1】
特定領域の地図データと、周囲状況を検出することによって自車の位置を推定するセンサと、を有し、かつ前記特定領域において走行する自律走行搬送ロボットと、
前記特定領域において人が携帯する通信端末と、
前記通信端末との近距離無線通信に基づき、前記人の位置に関する情報を前記自律走行搬送ロボットに提供する位置情報提供部と、
を備える、位置情報システム。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の位置情報システムにおいて、
前記自律走行搬送ロボットは、推定した前記自律走行搬送ロボットの位置を前記位置情報提供部へ提供する、位置情報システム。
【請求項3】
請求項1に記載の位置情報システムにおいて、
前記位置情報提供部は、前記通信端末の位置情報を、前記人の位置情報として前記自律走行搬送ロボットへ提供し、
前記自律走行搬送ロボットは、前記人の位置情報と、推定した前記自律走行搬送ロボットの位置とに基づいて、前記人と前記自律走行搬送ロボットとの相対位置を判断する、位置情報システム。
【請求項4】
請求項1に記載の位置情報システムにおいて、
前記自律走行搬送ロボットは、近距離無線通信が可能であり、
前記位置情報提供部は、前記通信端末との近距離無線通信に基づき、前記人の位置情報を取得すると共に、前記自律走行搬送ロボットとの近距離無線通信に基づき、前記自律走行搬送ロボットの位置情報を取得する、位置情報システム。
【請求項5】
請求項2又は4に記載の位置情報システムにおいて、
前記位置情報提供部は、前記人と前記自律走行搬送ロボットとの相対位置に関する情報を前記自律走行搬送ロボットに提供する、位置情報システム。
【請求項6】
請求項4に記載の位置情報システムにおいて、
前記位置情報提供部は、前記人の位置情報としての前記通信端末の位置情報と前記自律走行搬送ロボットの位置情報とを前記自律走行搬送ロボットに提供し、
前記自律走行搬送ロボットは、前記人の位置情報と前記自律走行搬送ロボットの位置とに基づいて、前記人と前記自律走行搬送ロボットとの相対位置を判断する、位置情報システム。
【請求項7】
請求項1に記載の位置情報システムにおいて、
前記位置情報提供部は、前記自律走行搬送ロボットに搭載され、かつ前記通信端末との近距離無線通信に基づき、前記人と前記自律走行搬送ロボットとの接近情報を前記自律走行搬送ロボットに提供する、位置情報システム。
【請求項8】
請求項1に記載の位置情報システムにおいて、
前記自律走行搬送ロボットは、前記人と前記自律走行搬送ロボットとが接近した場合に減速する、位置情報システム。
【請求項9】
請求項1又は8に記載の位置情報システムにおいて、
前記自律走行搬送ロボットは、前記人と前記自律走行搬送ロボットとが接近した場合に停止する、位置情報システム。
発明の詳細な説明
【技術分野】
【0001】
ここに開示する技術は、位置情報システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、従来の無人搬送車の制御装置が記載されている。無人搬送車の制御装置は、AGV(Automatic Guided Vehicle)を備える。無人搬送車の制御装置は、作業員とAGVとが同じ場所で作業する工場に適用される。AGVは、予め定められた走行経路に沿って走行する。無人搬送車の制御装置は、天井に設置された魚眼カメラを備える。無人搬送車の制御装置は、魚眼カメラの画像データに基づいて、作業員とAGVとの間のAGVの走行経路に沿った距離を求めると共に、求めた距離に基づいて、AGVが作業員に与える危険度を算出する。無人搬送車の制御装置は、算出した危険度に基づいて、AGVの速度を制御する。
【先行技術文献】
【特許文献】
【0003】
特開2021-140638号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
AGVの走行経路は予め定まっている。前記従来の無人搬送車の制御装置は、走行経路が予め定まっているから、走行経路に沿った作業員とAGVとの間の距離を求めることができる。
【0005】
自律走行搬送ロボット(Autonomous Mobile Robot:以下、AMR)の走行経路は、予め定まっていない。前記従来の無人搬送車の制御装置は、AMRを備えたロボットシステムには適用が難しい。
【課題を解決するための手段】
【0006】
ここに開示する技術は、位置情報システムに関する。位置情報システムは、
特定領域の地図データと、周囲状況を検出することによって自車の位置を推定するセンサと、を有し、かつ前記特定領域において走行する自律走行搬送ロボットと、
前記特定領域において人が携帯する通信端末と、
前記通信端末との近距離無線通信に基づき、前記人の位置に関する情報を前記自律走行搬送ロボットに提供する位置情報提供部と、
を備える。
【発明の効果】
【0007】
人の位置に関する情報が自律走行搬送ロボットに提供されるため、位置情報システムは、人と自律走行搬送ロボットとが存在する特定領域における安全性を確保できる。
【図面の簡単な説明】
【0008】
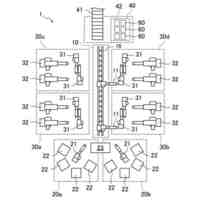
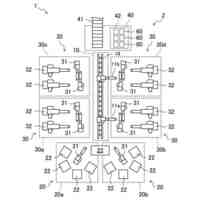
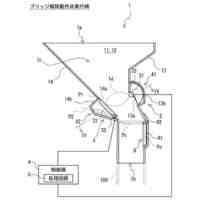
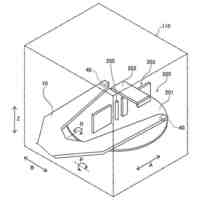
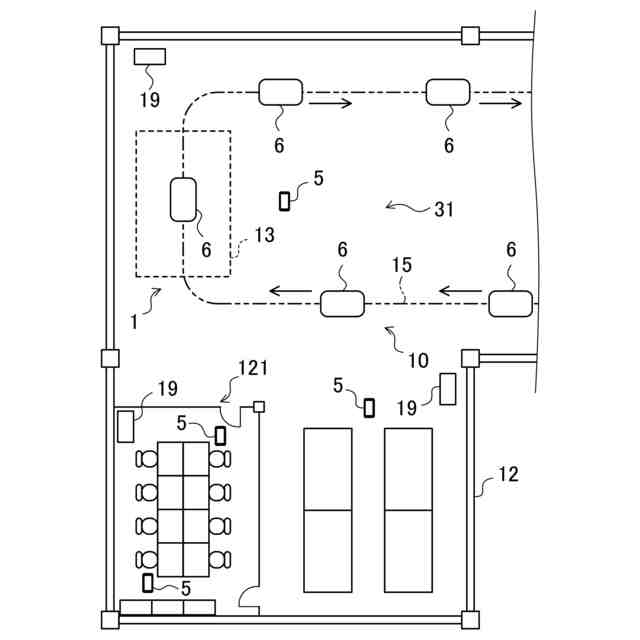
図1は、位置情報システムが適用された自動車の製造工場の一部を示している。
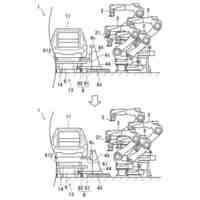
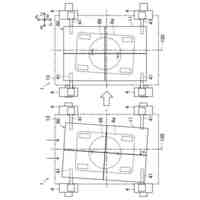
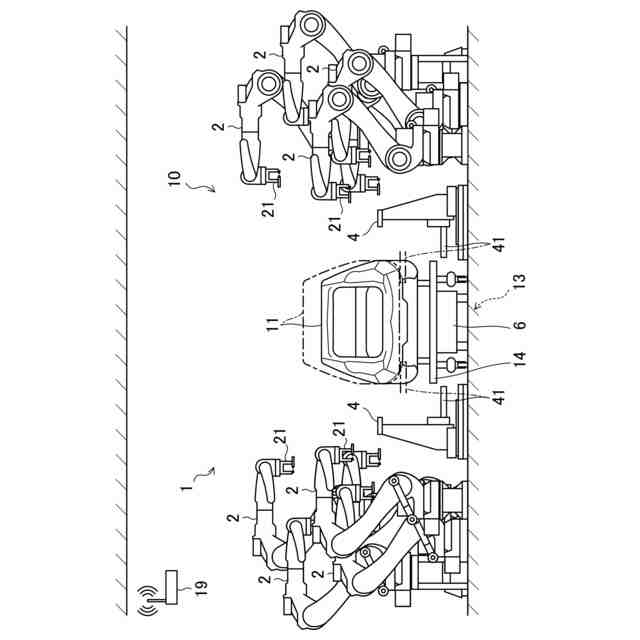
図2は、ワークに対する作業が行われる作業エリアを示している。
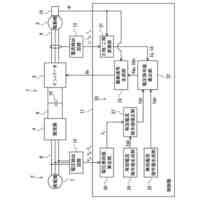
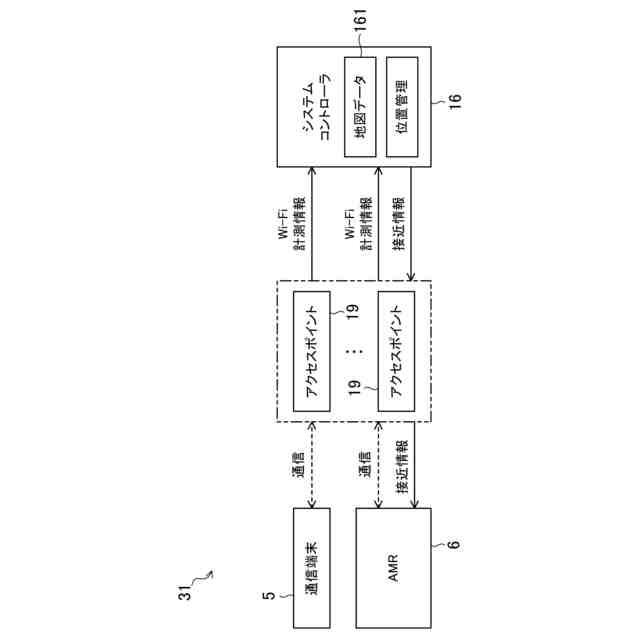
図3は、位置情報システムが含まれるロボットシステムのブロック図である。
図4は、AMRのブロック図である。
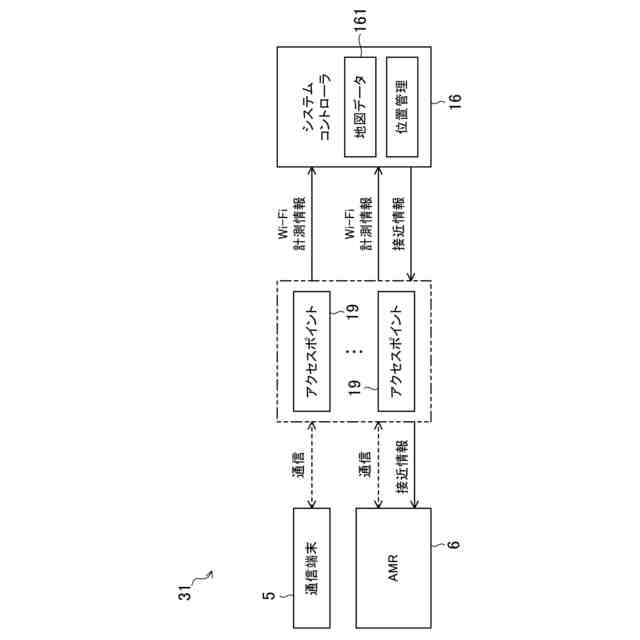
図5は、位置情報システムにおける情報の授受を示している。
図6は、AMRの位置と人の位置とが付加された地図データを例示している。
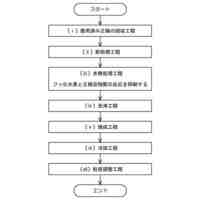
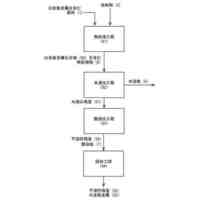
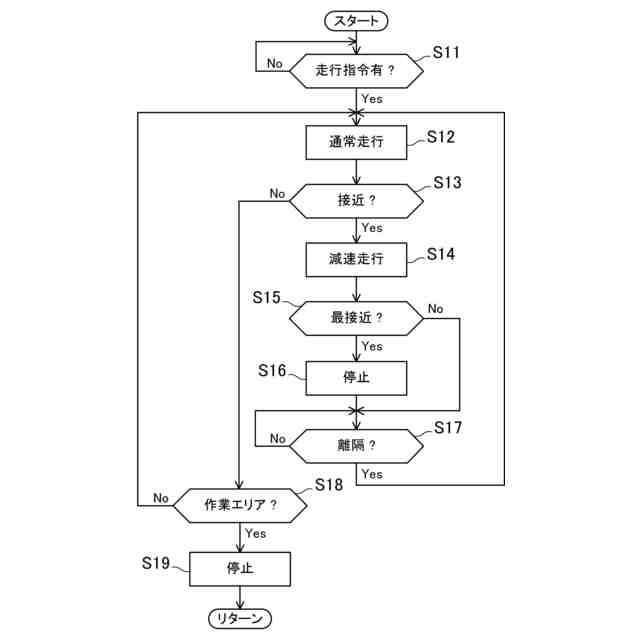
図7は、AMRの走行制御を示すフローチャートである。
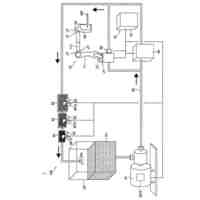
図8は、位置情報システムの変形例を示している。
図9は、位置情報システムの別の変形例を示している。
図10は、位置情報システムのさらに別の変形例を示している。
図11は、位置情報システムのさらに別の変形例を示している。
【発明を実施するための形態】
【0009】
以下、位置情報システムの実施形態について、図面を参照しながら説明する。ここで説明する位置情報システムは例示である。
【0010】
(ロボットシステムの全体構造)
図1は、位置情報システムが適用された自動車の製造工場の一部を示している。図2は、製造工場において、ワークに対する作業が行われる作業エリア13を例示している。製造工場の建屋12には、製造ライン10が設けられている。図例の製造ライン10は、自動車のボデー11に対する溶接、より詳細には、スポット溶接が行われるラインである。ワークは、ボデー11である。製造ライン10において、ボデー11は、後述するAMR6によって搬送される。作業エリア13は、AMR6によって搬送されるワークが、作業を受けるために留まるエリアを意味する。作業エリア13は、製造ライン10の一部である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
表面材
9日前
川崎重工業株式会社
作業設備
1か月前
川崎重工業株式会社
水素遮蔽膜
29日前
川崎重工業株式会社
排ガス採取器
13日前
川崎重工業株式会社
搬送システム
1か月前
川崎重工業株式会社
基板搬送ロボット
1日前
川崎重工業株式会社
ロボットシステム
1日前
川崎重工業株式会社
基板搬送ロボット
1日前
川崎重工業株式会社
基板搬送ロボット
1日前
川崎重工業株式会社
基板搬送ロボット
1日前
川崎重工業株式会社
基板搬送ロボット
1日前
川崎重工業株式会社
廃棄物投入ホッパ
1か月前
川崎重工業株式会社
ロボットシステム
1日前
川崎重工業株式会社
ロボットシステム
1日前
川崎重工業株式会社
位置情報システム
1日前
川崎重工業株式会社
クローズドインペラ
1日前
川崎重工業株式会社
正極活物質の再生方法
2日前
川崎重工業株式会社
液化ガス導入システム
9日前
川崎重工業株式会社
二酸化炭素分離システム
1か月前
川崎重工業株式会社
電池セル及びその分解方法
23日前
川崎重工業株式会社
換気システム及びシェルター
29日前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
1か月前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
1か月前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
1か月前
川崎重工業株式会社
ロボットシステム及びロボット
1日前
川崎重工業株式会社
パレット及びロボットシステム
1か月前
川崎重工業株式会社
浸炭製品の硬さ予測装置及び方法
1か月前
川崎重工業株式会社
電力供給システムおよびその制御方法
8日前
川崎重工業株式会社
歯車装置の支持構造の診断装置及び診断方法
今日
川崎重工業株式会社
液化ガス用配管ユニットおよびその組立方法
1日前
川崎重工業株式会社
白金族金属の可溶化方法及び金属の分離方法
8日前
川崎重工業株式会社
溶接器具の冷却システムおよびロボットシステム
1か月前
川崎重工業株式会社
ガスタービンエンジンの制御装置および制御方法
5日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
19日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
19日前
川崎重工業株式会社
船舶の推進システム、制御プログラムおよび制御方法
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ