TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025124380
公報種別
公開特許公報(A)
公開日
2025-08-26
出願番号
2024020384
出願日
2024-02-14
発明の名称
モータ制御装置
出願人
株式会社東芝
,
東芝デバイス&ストレージ株式会社
代理人
弁理士法人サトー
主分類
H02P
21/13 20060101AFI20250819BHJP(電力の発電,変換,配電)
要約
【課題】モータ駆動を安定させるモータ制御装置を提供する。
【解決手段】相電流よりロータ位置を決定しロータ位置に追従するようにPWM信号を生成するPWM信号生成部、インバータ回路の直流側に接続された電流検出素子に発生した信号とPWM信号とから相電流を検出する電流検出部を備える。PWM信号生成部は、電流検出部が搬送波周期内の2点のタイミングで2相の電流を検出可能となるように第1~第3出力方式が実行可能で、更に相電流と出力電圧指令とに基づいて電機子巻線の鎖交磁束を推定する機能部、鎖交磁束から回転磁界角度及び速度を推定しPWM信号生成部に変調率が第1閾値未満であれば第1、変調率が第1閾値以上で且つ第2閾値未満であれば第2、変調率が第2閾値以上であれば第3の各出力方式を実行させるように切替え指令を出力する機能部を備える。
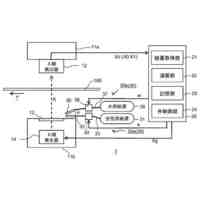
【選択図】図1
特許請求の範囲
【請求項1】
3相ブリッジ接続された複数のスイッチング素子をPWM信号に従いオンオフ制御することで、直流を3相交流に変換するインバータ回路を介してモータを駆動するモータ制御装置において、
前記インバータ回路の直流側に接続され、電流値に対応する信号を発生する電流検出素子と、
少なくとも前記モータの相電流に基づいてロータ位置を決定し、前記ロータ位置に追従するようにPWM信号を生成するPWM信号生成部と、
前記電流検出素子に発生した信号と前記PWM信号とに基づいて、前記モータの相電流を検出する電流検出部とを備え、
前記PWM信号生成部は、前記電流検出部が、前記PWM信号の搬送波周期内の2点のタイミングで2相の電流を検出可能となるように、3相の位相シフトPWM信号を出力させて、前記電流検出部に固定のタイミングで電流を検出させる第1出力方式と、
2相の位相シフトPWM信号を出力させて、前記電流検出部に固定のタイミングで電流を検出させる第2出力方式と、
3相又は2相の対称PWM信号を出力させて、前記電流検出部に固定又は可変のタイミングで電流を検出させる第3出力方式とが実行可能であり、
前記モータの相電流と出力電圧指令とに基づいて前記モータの電機子巻線の鎖交磁束を推定する磁束推定部と、
前記鎖交磁束に基づいて前記モータの回転磁界角度及び速度を推定し、前記PWM信号生成部に、前記モータ印可電圧の変調率が第1閾値未満であれば前記第1出力方式を実行させ、
前記変調率が前記第1閾値以上で且つ第2閾値未満であれば前記第2出力方式を実行させ、
前記変調率が前記第2閾値以上であれば前記第3出力方式を実行させるように切替え指令を出力する信号切替え出力部と、
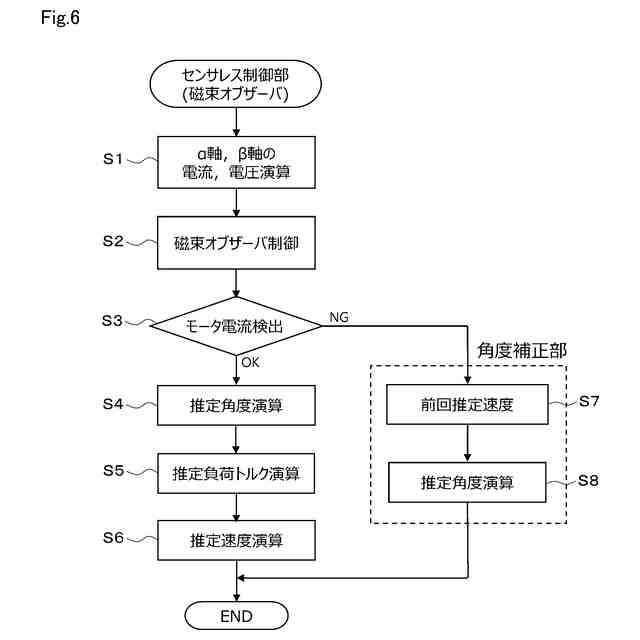
前記電流検出部が、電気角1周期の中で前記相電流が検出できない際には、前回の制御周期で推定した速度を使用し、且つ前回の制御周期で推定した速度を基に演算した角度を生成する角度補正部と、を更に備えるモータ制御装置。
続きを表示(約 780 文字)
【請求項2】
前記信号切替え出力部は、前記第3出力方式を実行させるように切替え指令を出力した後に、前記変調率が前記第1閾値以上で且つ前記第2閾値未満に設定される第3閾値を下回ると、前記第2出力方式を実行させるように切替え指令を出力する請求項1記載のモータ制御装置。
【請求項3】
前記PWM信号生成部は、前記第1出力方式において、
3相のPWM信号のうち1相は、前記搬送波周期の任意の位相を基準として遅れ側,進み側の双方向にパルス幅を増減させ、
他の1相は、前記搬送波周期の任意の位相を基準として遅れ側,進み側の一方向にパルス幅を増減させ、
残りの1相は、前記搬送波周期の任意の位相を基準として前記方向とは逆方向にパルス幅を増減させて生成する請求項1記載のモータ制御装置。
【請求項4】
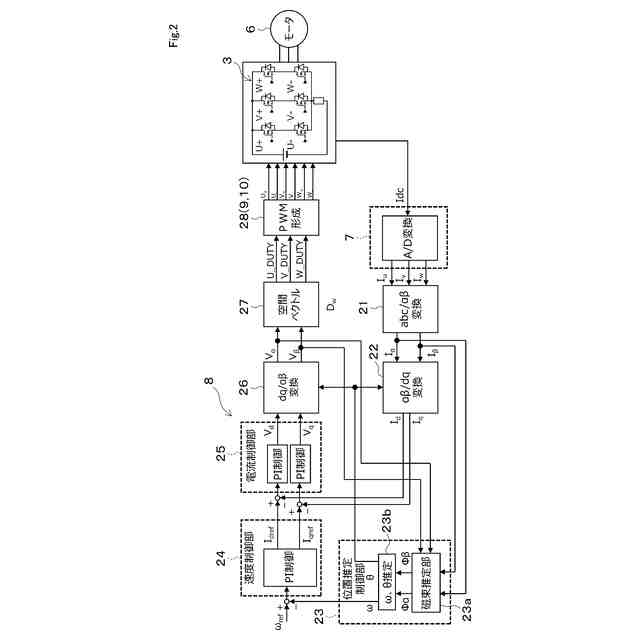
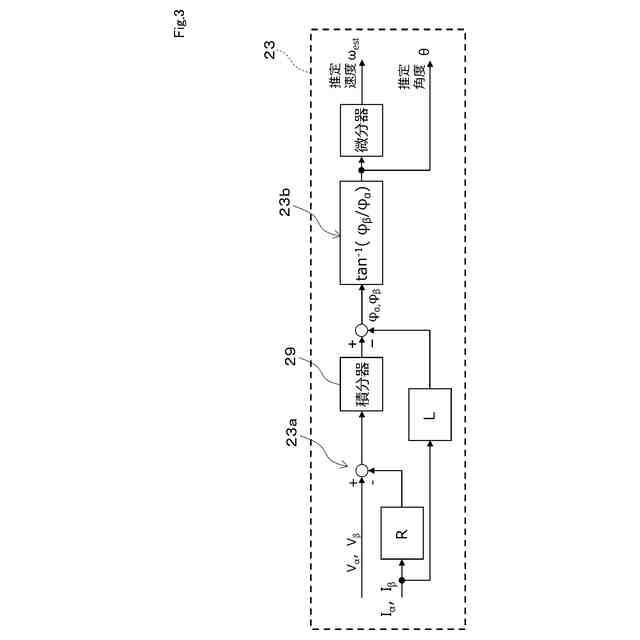
前記磁束推定部は、前記3相交流のモータ電流から2相交流のモータ電流に変換したモータ電流値と、直流成分の出力電圧指令を2相交流成分に変換した出力電圧指令と、前記モータの巻線抵抗値とに基づいて時間積分することで、前記鎖交磁束を推定する請求項1に記載のモータ制御装置。
【請求項5】
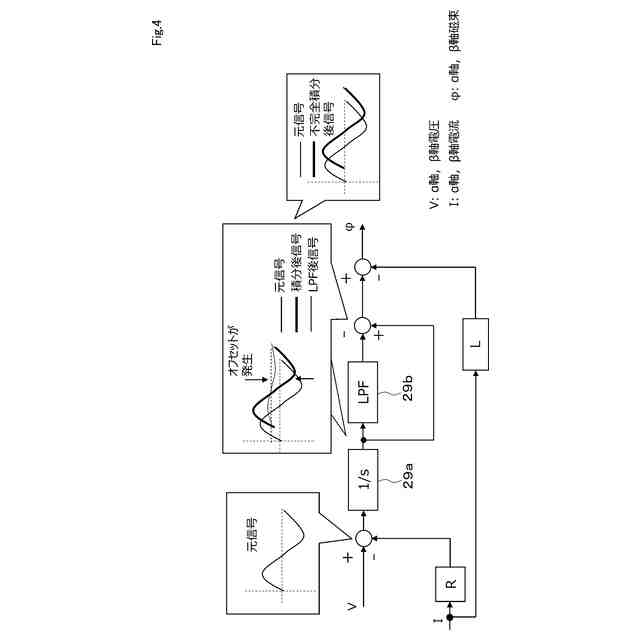
前記磁束推定部は、前記2相に変換した出力電圧指令と前記モータの2相交流の電流と前記モータの巻線抵抗値から演算した値とを、2重の積分器により時間積分することで前記鎖交磁束を推定する請求項4に記載のモータ制御装置。
【請求項6】
前記磁束推定部は、推定した磁束から演算したモータ角度で発生する負荷トルクによって増減する位置推定誤差を、q軸インダクタンスLq、d軸インダクタンスLd、q軸電流Iq、d軸電流Id、磁石磁束Φより演算されるトルク角によって補正する請求項1から5の何れか一項に記載のモータ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、3相ブリッジ接続された複数のスイッチング素子をPWM制御することで、インバータ回路を介してモータを制御する制御装置に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
モータを制御するためにU,V,W各相の電流を検出する場合、インバータ回路の直流部に挿入した1つのシャント抵抗を用いて電流検出を行う技術がある。この方式で3相の全ての電流を検出するには、PWM(Pulse Width Modulation;パルス幅変調)キャリア;搬送波の1周期内において、2相以上の電流を検出できるように3相のPWM信号を発生させる必要がある。
【0003】
そのため、特許文献1では、1周期内におけるPWM信号の位相をシフトさせることで常に2相以上の電流を、騒音を増大させること無くモータ印可電圧の変調率が低い領域でも検出できる技術が提案されている。一方、推定した磁束からモータ速度、及び角度を推定する方法として、例えば、非特許文献1では、磁束オブザーバが提案されている。磁束オブザーバ方式では、例えば電流センサから得た二相電流Iα及びIβと、二相電圧Vα及びVβとモータ巻線抵抗Rとに基づいて、モータ巻線の鎖交磁束のα軸成分Ψα及びβ軸成分Ψβを推定すると共に、モータの回転磁界角度、ひいてはロータの位相角度及び発生トルクTを推定する。
【0004】
また、出願人は、特願2022-130097号において、推定した鎖交磁束からモータの回転磁界の位相角度及び速度を推定する磁束オブザーバ方式と1シャント電流出力方式とを組み合わせた際に、起動から低速領域で生じうる鎖交磁束の推定誤差を抑制する技術を提案している。
【先行技術文献】
【特許文献】
【0005】
特許第5178799号公報
【非特許文献】
【0006】
井上、他3名,井上、他5名「PMSMにおける直接トルク制御の運転領域を拡大する磁束推定手法に関する実機検証」令和3年電気学会全国大会講演論文集,電気学会,令和3年3月1日 5‐095
【発明の概要】
【発明が解決しようとする課題】
【0007】
非特許文献1に示される磁束オブザーバにおいて、磁束の推定に用いる電流の検出には、CT等の電流センサや3シャント電流出力方式の適用が想定されている。しかしながら、家電機器では、インバータの低コスト化等のために1シャント電流出力方式が適用されることが多い。1シャント電流出力方式を適用すると、起動から低速時におけるモータ印可電圧の変調率が低い場合に、電流を検出することができず磁束の推定に誤差が生じる可能性がある。特に、正弦波上に変化しているα軸、β軸の電流を磁束推定の演算に用いる場合、電流の未検出時に前回値を用いると、鎖交磁束の推定誤差が大きくなるという問題がある。
【0008】
また、上記出願では、推定した鎖交磁束からモータの回転磁界の位相角度及び速度を推定する磁束オブザーバ方式と1シャント電流出力方式とを組み合わせた際に、3相変調方式で1周期内におけるPWM信号の位相をシフトさせ、起動から低速領域で生じうる鎖交磁束の推定誤差を抑制し、安定したモータ駆動を可能とするモータ制御装置を提供している。しかしながら、中速領域において3相変調方式でPWM信号の位相をシフトさせた場合、電流検出率が急激に低下するため、鎖交磁束の推定誤差が大きくなるという問題がある。
【0009】
そこで、磁束オブザーバ方式において、起動から高速領域のモータ駆動範囲全域で鎖交磁束の推定誤差を抑制し、安定したモータ駆動を可能とするモータ制御装置を提供する。
【課題を解決するための手段】
【0010】
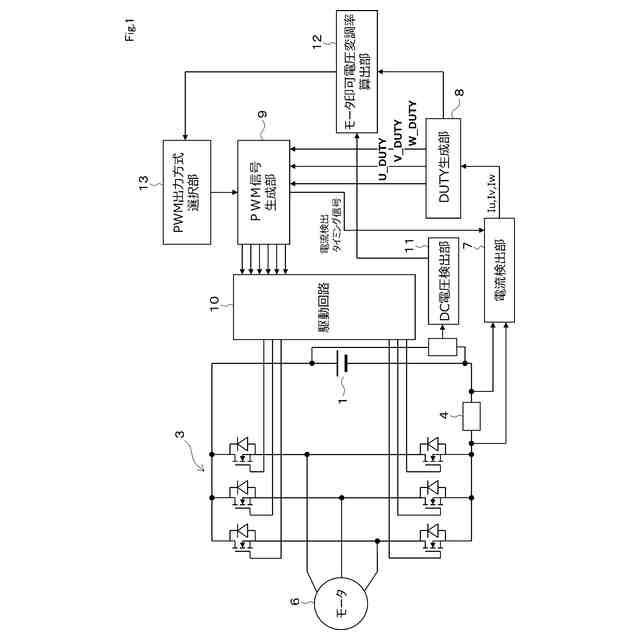
実施形態のモータ制御装置は、3相ブリッジ接続された複数のスイッチング素子をPWM信号に従いオンオフ制御することで、直流を3相交流に変換するインバータ回路を介してモータを駆動するものにおいて、
前記インバータ回路の直流側に接続され、電流値に対応する信号を発生する電流検出素子と、
少なくとも前記モータの相電流に基づいてロータ位置を決定し、前記ロータ位置に追従するようにPWM信号を生成するPWM信号生成部と、
前記電流検出素子に発生した信号と前記PWM信号とに基づいて、前記モータの相電流を検出する電流検出部とを備え、
前記PWM信号生成部は、前記電流検出部が、前記PWM信号の搬送波周期内の2点のタイミングで2相の電流を検出可能となるように、3相の位相シフトPWM信号を出力させて、前記電流検出部に固定のタイミングで電流を検出させる第1出力方式と、
2相の位相シフトPWM信号を出力させて、前記電流検出部に固定のタイミングで電流を検出させる第2出力方式と、
3相又は2相の対称PWM信号を出力させて、前記電流検出部に固定又は可変のタイミングで電流を検出させる第3出力方式とが実行可能であり、
前記モータの相電流と出力電圧指令とに基づいて前記モータの電機子巻線の鎖交磁束を推定する磁束推定部と、
前記鎖交磁束に基づいて前記モータの回転磁界角度及び速度を推定し、前記PWM信号生成部に、前記モータ印可電圧の変調率が第1閾値未満であれば前記第1出力方式を実行させ、
前記変調率が前記第1閾値以上で且つ第2閾値未満であれば前記第2出力方式を実行させ、
前記変調率が前記第2閾値以上であれば前記第3出力方式を実行させるように切替え指令を出力する信号切替え出力部と、
電気角1周期の中で前記モータ電流が検出できない際には、前回の制御周期で推定した速度を使用し、且つ前回の制御周期で推定した速度を基に演算した角度を生成する角度補正部と、を更に備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社東芝
センサ
24日前
株式会社東芝
センサ
今日
株式会社東芝
固定子
7日前
株式会社東芝
回路素子
23日前
株式会社東芝
遮断装置
1か月前
株式会社東芝
燃料電池
1か月前
株式会社東芝
ドア構造
10日前
株式会社東芝
配線治具
1か月前
株式会社東芝
X線厚み計
29日前
株式会社東芝
電磁流量計
1か月前
株式会社東芝
ラック装置
3日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
電動送風機
1日前
株式会社東芝
主幹制御器
1か月前
株式会社東芝
開発支援装置
11日前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
ディスク装置
14日前
株式会社東芝
差動伝送回路
3日前
株式会社東芝
計測システム
16日前
株式会社東芝
水中洗浄装置
1か月前
株式会社東芝
アイソレータ
2日前
株式会社東芝
ディスク装置
1日前
株式会社東芝
ディスク装置
2日前
株式会社東芝
アンテナ装置
28日前
株式会社東芝
ディスク装置
17日前
株式会社東芝
アンテナ装置
1か月前
株式会社東芝
電力変換装置
21日前
株式会社東芝
操作盤カバー
1か月前
株式会社東芝
異常検出装置
15日前
株式会社東芝
計算機システム
1か月前
株式会社東芝
紫外線照射装置
24日前
株式会社東芝
部材の接合方法
17日前
株式会社東芝
モータ制御装置
3日前
株式会社東芝
はしごの固定金具
7日前
株式会社東芝
磁気ディスク装置
3日前
株式会社東芝
磁気ディスク装置
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ