TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025122499
公報種別
公開特許公報(A)
公開日
2025-08-21
出願番号
2024018031
出願日
2024-02-08
発明の名称
可動体制御方法、および可動体の制御装置
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
13/00 20060101AFI20250814BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】物理パラメータを同定や推定をすることなく、力センサを用いて容易に滑り抑制安定化できる可動体制御方法、および可動体の制御装置を提供する。
【解決手段】可動体制御方法は、少なくとも一つの可動部と、可動部と接触する接触物によって接触物または可動部自体を制御する方法であって、制御装置が、複数の可動部により接触面に力を与えることで、可動部または接触物を制御し、接触面に生じる接触力をエネルギーに基づいて算出する際、可動部全体または接触物での全エネルギーを保存エネルギーと減衰エネルギーの和であり増加しないものとし、保存エネルギーの項の中の外力項は、可動部と接触物の接触面に対する滑りの情報を含み、かつ外力項が積分可能であるように算出する。
【選択図】図17
特許請求の範囲
【請求項1】
少なくとも一つの可動部と、前記可動部と接触する接触物によって前記接触物または前記可動部自体(バイクならバイク自体)を制御方法であって、
制御装置が、
複数の前記可動部により接触面に力を与えることで、前記可動部または前記接触物を制御し、
前記接触面に生じる接触力をエネルギーに基づいて算出する際、前記可動部全体または前記接触物での全エネルギーを保存エネルギーと減衰エネルギーの和であり増加しないものとし、
前記保存エネルギーの項の中の外力項は、前記可動部と前記接触物の前記接触面に対する滑りの情報を含み、かつ前記外力項が積分可能であるように算出する、
可動体制御方法。
続きを表示(約 1,700 文字)
【請求項2】
複数の指部を備えるハンドによって接触物を操作する制御方法であって、
前記指部は可動部であり、
制御装置が、
複数の前記指部により力を与えることで前記接触物の位置姿勢を制御し、
前記指部と前記接触物との接触面に生じる接触力をエネルギーに基づいて算出する際、前記可動部全体でのエネルギーを保存エネルギーと減衰エネルギーの和であり増加しないものとし、
前記保存エネルギーの項の中の外力項は、前記指部と前記接触物との前記接触面に対する滑りの情報を含み、かつ前記外力項が積分可能であるように算出する、
可動体制御方法。
【請求項3】
前記外力項は、前記可動部それぞれの前記接触物に対する接触力を時間微分した合計が、次式で表され、
TIFF
2025122499000022.tif
16
170
fは接触点における力であり、p
・
は接触点の位置の変化である、
請求項1または請求項2に記載の可動体制御方法。
【請求項4】
前記可動部のエネルギーの時間微分の指令値が、次式で表され、
TIFF
2025122499000023.tif
20
170
k
f
はゲインであり、fは接触点における力である、
請求項1または請求項2に記載の可動体制御方法。
【請求項5】
前記制御装置は、
前記可動部への力指令E
・
cmd
を、次式を用いてオフセットさせることで、滑りの変化を抽出して制御し、
TIFF
2025122499000024.tif
25
170
f
cmd
は力の目標値であり、f
act
は滑り情報である、
請求項1または請求項2に記載の可動体制御方法。
【請求項6】
前記制御装置は、
次式を用いて、リヤプノフ関数と相関のある前記可動部への力指令E
・
cmd
の変化からゲインを増減させ、
TIFF
2025122499000025.tif
25
170
k
f
、k
e
それぞれはゲインである、
請求項1または請求項2に記載の可動体制御方法。
【請求項7】
少なくとも一つの可動部と、前記可動部と接触する接触物によって前記接触物または前記可動部自体(バイクならバイク自体)を制御する可動体の制御装置であって、
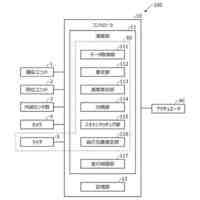
複数の前記可動部により接触面に力を与えることで、前記可動部または前記接触物を制御する制御指令生成部と、
前記接触面に生じる接触力をエネルギーに基づいて算出する際、前記可動部全体または前記接触物での全エネルギーを保存エネルギーと減衰エネルギーの和であり増加しないものとして接触力を算出する接触力算出部と、
を備え、
前記接触力算出部は、前記保存エネルギーの項の中の外力項が前記可動部と前記接触物の前記接触面に対する滑りの情報を含み、かつ前記外力項が積分可能であるように算出する、
可動体の制御装置。
【請求項8】
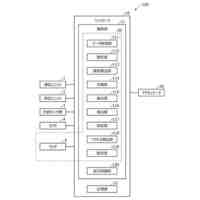
複数の指部を備えるハンドによって接触物を操作する制御装置であって、
複数の前記指部により力を与えることで前記接触物の位置姿勢を制御する制御指令生成部と、
前記指部と前記接触物との接触面に生じる接触力をエネルギーに基づいて算出する際、前記可動部全体でのエネルギーを保存エネルギーと減衰エネルギーの和であり増加しないものとして接触力を算出する接触力算出部と、
前記接触力算出部は、前記保存エネルギーの項の中の外力項が前記指部と前記接触物との前記接触面に対する滑りの情報を含み、かつ前記外力項が積分可能であるように算出する、
可動体の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、可動体制御方法、および可動体の制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
指部を有するロボットハンド等の制御は、例えば指先に設けられた6軸センサまたは指腹に設けられた接触センサによって指先から物体に作用する力を検知して、物体に作用する力が目標作用力に一致するように制御する(例えば、特許文献1参照)。
【0003】
指部で物体を把持する場合、物体の形状等によっては、物体と指先との点接触状態に加え、物体を転がしながら(物体が転がりながら)把持する転がり接触状態、および物体が滑る滑り接触状態それぞれでの把持制御が必要である。点接触状態と転がり接触状態では、接触情報(接触力と接触点)のみで把持物体姿勢が分かる。
【0004】
一方、滑り接触状態では、接触情報だけでは姿勢推定のための情報が不足している。このため、滑り接触状態を抑制するためには、その物理パラメータを既知としなければいけなかった。または、滑り接触状態を抑制するためには、滑りの状況を考慮しない制御手法を用いていた。
【先行技術文献】
【特許文献】
【0005】
特許第5829103号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来技術の滑り接触状態の制御では、滑りパラメータを推定し、制御対象の物理パラメータを完全にするという困難な設定が必要であった。このように、従来技術では、滑りを何かしらの推定器で推定しなければいけなかったが困難であった。
【0007】
本発明は、上記の問題点に鑑みてなされたものであって、物理パラメータを同定や推定をすることなく、力センサを用いて容易に滑り抑制安定化できる可動体制御方法、および可動体の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
(1)上記目的を達成するため、本発明の一態様に係る可動体制御方法は、少なくとも一つの可動部(例えば指部やバイク)と、前記可動部と接触する接触物(例えば把持物体や床面)によって前記接触物(例えば指部なら対象物)または前記可動部自体(バイクならバイク自体)を制御方法であって、制御装置が、複数の前記可動部により接触面に力を与えることで、前記可動部または前記接触物を制御し、前記接触面に生じる接触力をエネルギーに基づいて算出する際、前記可動部全体または前記接触物での全エネルギーを保存エネルギーと減衰エネルギーの和であり増加しないものとし、前記保存エネルギーの項の中の外力項は、前記可動部と前記接触物の前記接触面に対する滑りの情報を含み、かつ前記外力項が積分可能であるように算出する、可動体制御方法である。
【0009】
(2)上記目的を達成するため、本発明の一態様に係る可動体制御方法は、複数の指部を備えるハンドによって接触物を操作する制御方法であって、前記指部は可動部であり、制御装置が、複数の前記指部により力を与えることで前記接触物の位置姿勢を制御し、前記指部と前記接触物との接触面に生じる接触力をエネルギーに基づいて算出する際、前記可動部全体でのエネルギーを保存エネルギーと減衰エネルギーの和であり増加しないものとし、前記保存エネルギーの項の中の外力項は、前記指部と前記接触物との前記接触面に対する滑りの情報を含み、かつ前記外力項が積分可能であるように算出する、可動体制御方法である。
【0010】
(3)上記(1)または(2)の本発明の一態様に係る可動体制御方法において、前記外力項は、前記可動部それぞれの前記接触物に対する接触力を時間微分した合計が、次式で表され、
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
今日
本田技研工業株式会社
板ばね
25日前
本田技研工業株式会社
収納部
19日前
本田技研工業株式会社
搬送装置
17日前
本田技研工業株式会社
ロボット
25日前
本田技研工業株式会社
積層装置
24日前
本田技研工業株式会社
触媒インク
今日
本田技研工業株式会社
触媒インク
今日
本田技研工業株式会社
鞍乗型車両
18日前
本田技研工業株式会社
位置推定装置
6日前
本田技研工業株式会社
導体接合方法
6日前
本田技研工業株式会社
物体検出装置
12日前
本田技研工業株式会社
電力変換装置
7日前
本田技研工業株式会社
位置決め装置
24日前
本田技研工業株式会社
管理システム
7日前
本田技研工業株式会社
薄板搬送装置
13日前
本田技研工業株式会社
物体検出装置
10日前
本田技研工業株式会社
鞍乗り型車両
20日前
本田技研工業株式会社
電流検出装置
12日前
本田技研工業株式会社
電力変換装置
11日前
本田技研工業株式会社
電流検出装置
12日前
本田技研工業株式会社
車両制御装置
6日前
本田技研工業株式会社
電力変換装置
11日前
本田技研工業株式会社
鞍乗り型車両
4日前
本田技研工業株式会社
鞍乗り型車両
20日前
本田技研工業株式会社
外界認識装置
14日前
本田技研工業株式会社
ガス回収装置
18日前
本田技研工業株式会社
水電解システム
今日
本田技研工業株式会社
リーク検出装置
12日前
本田技研工業株式会社
水電解システム
6日前
本田技研工業株式会社
回転電機システム
24日前
本田技研工業株式会社
燃料電池システム
11日前
本田技研工業株式会社
回転電機システム
24日前
本田技研工業株式会社
車両制御システム
17日前
本田技研工業株式会社
複合動力システム
12日前
本田技研工業株式会社
時間変化出力回路
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ